Clear Sky Science · ja
液晶エラストマーに基づく電気制御二安定発振器
自ら動く機械
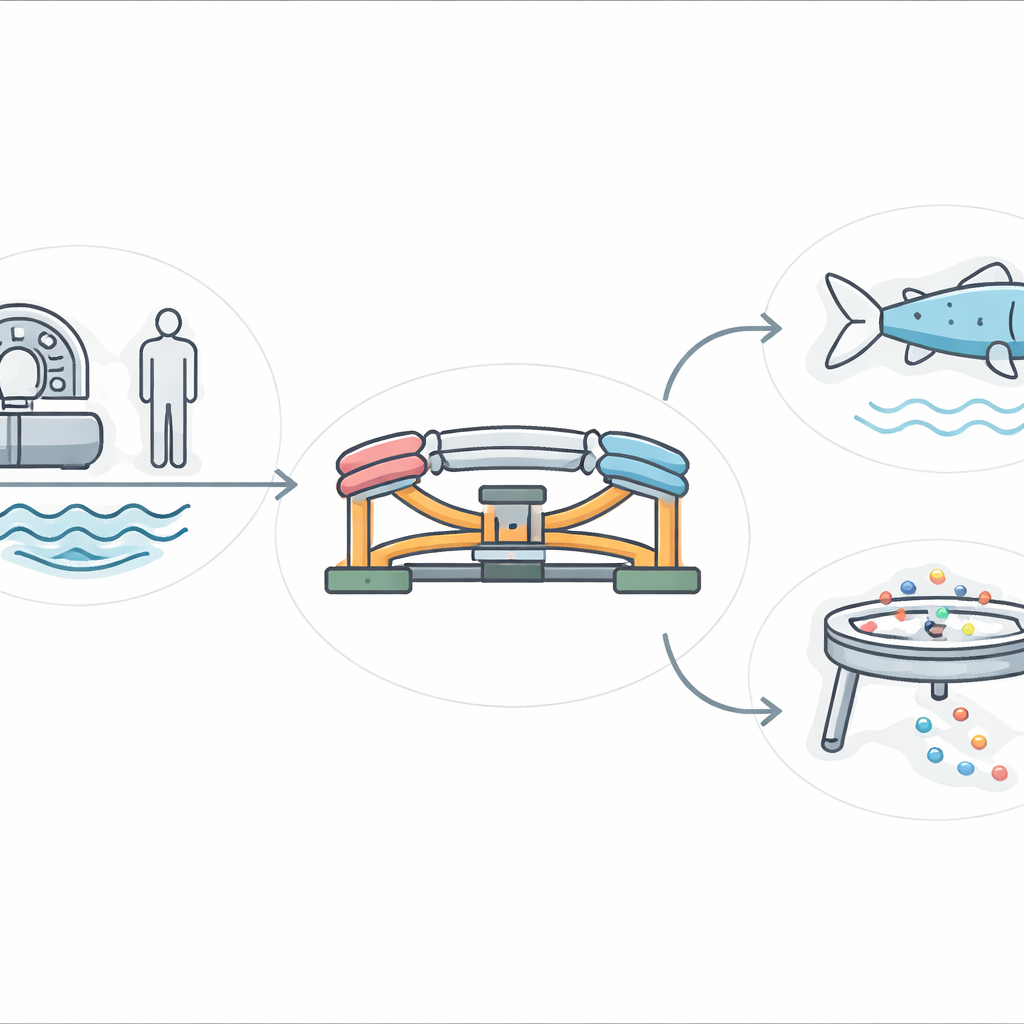
工場や病院、研究所で働く多くの機械は、往復運動を安定したリズムで行うために電動モーターや電子制御を頼りにしています。しかし、強い磁場のある場所、深海の環境、あるいは体内のような場所では、同じ電子機器がかさばったり信頼性を欠いたり、安全性に問題を生じたりします。本研究は、柔らかく弾性のある材料で作られ、単純な電池だけで自律的に振動する新しい種類の“自己鼓動する機械的ハート”を紹介します。これにより、従来のモーターが苦手とする環境でも働ける、より賢く堅牢な装置の可能性が開けます。
二つの安定姿勢を持つソフトエンジン
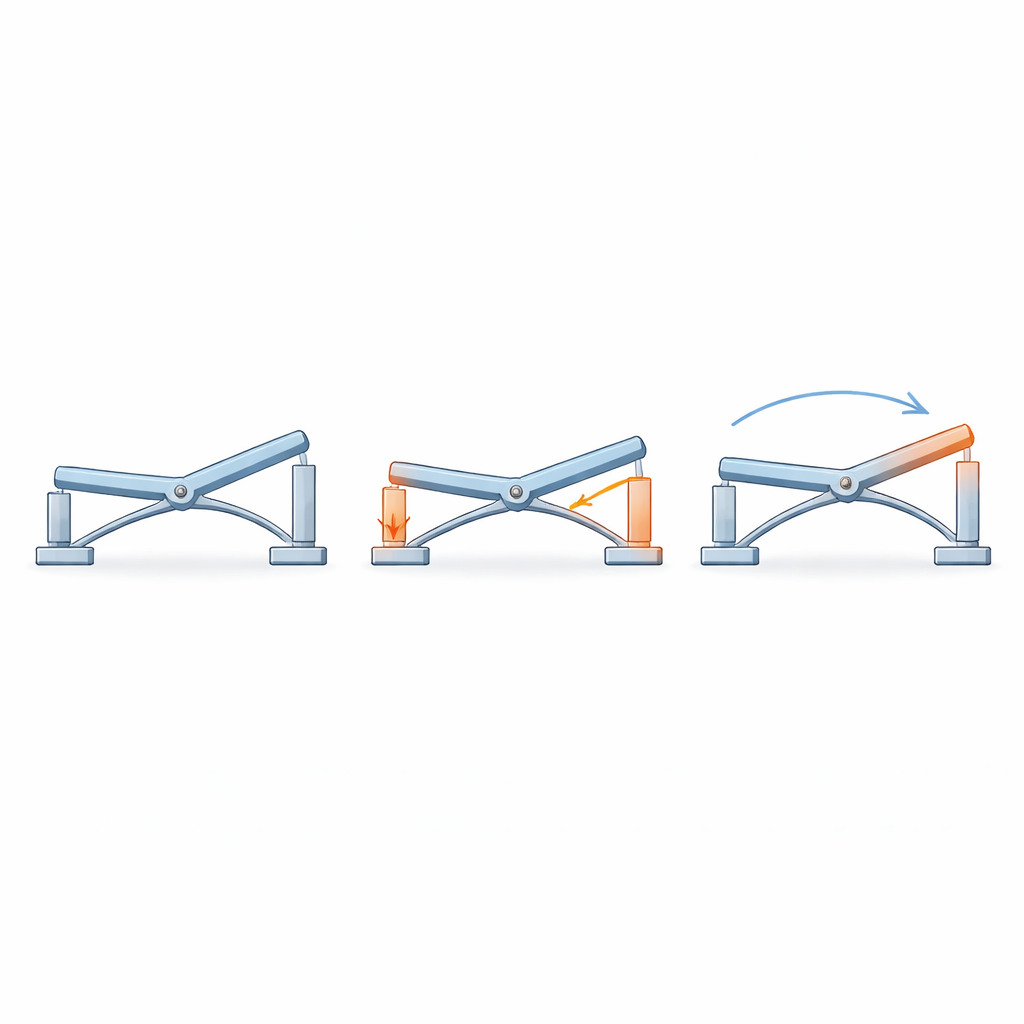
本研究の中心にあるのは、1つではなく2つの好ましい安静位置を持つ小さな機械装置、二安定発振器です。著者らはこれを、中央のロッキングバーを両側から予め曲げられたプラスチック製の梁で支持した構造に組み立てています。ちょうど柔軟なバネに挟まれた小さなシーソーのような形です。バーの両側には液晶エラストマーと呼ばれる特殊な条材を取り付けています。これは人工筋肉のように振る舞い、電気的に加熱されると収縮し、冷えると弛緩して伸びます。下部に配したスライディング接点は純機械的なスイッチとして働き、どちら側に通電するかを決めます。これらが一緒になって、運動と加熱がデジタル制御なしに互いを駆動し続ける閉ループを作り出します。
ソフトな筋肉が仕掛ける動作の核心
一方の液晶ストリップに低い定常電圧を印加すると、ゆっくり収縮してロッカーをその側へ引き寄せます。ロッカーが傾くと、予め曲げられた梁がたわんで弾性エネルギーを蓄え、ちょうどゼンマイを巻くような状態になります。ある臨界角に達すると、梁は突然反転して逆の形状へとスナップスルーし、蓄えたエネルギーを急速かつ強力な動きとして解放してロッカーをもう一方の安定位置へ打ち切ります。この急速な変化はスライディング接点の位置も切り替え、最初のストリップへの通電を遮断して反対側へ通電します。その後、逆のプロセスが繰り返されます:新たに通電されたストリップが加熱・収縮し、梁にエネルギーを蓄え、別のスナップを誘発します。こうして定常直流入力が、装置自身の力学によって往復運動とパルス状の電気信号へと自動的に変換されます。
力、速度、耐久性の調整
研究者たちは人工筋肉と支持構造の挙動を精密に評価しました。駆動電圧を変えることで、液晶ストリップが大きく可逆的な収縮と力を発揮し、梁を損傷することなく確実にスナップを誘発できることを示しました。数値シミュレーションにより、梁の長さ、厚さ、剛性を選定し、二つの安定状態の間に明確なエネルギーバリアを持たせる設計が可能であることを導きました。実験では、発振器が多数サイクルにわたって振れ角と周期をほとんど変化させずに維持できることが示され、耐久性が良好であることが確認されました。また、電圧と膜厚が加熱・冷却の時間にどう影響するかも明らかにしました:高い電圧や厚い膜は加熱時間を短くする一方、冷却は比較的遅く、最終的には最大周波数を制限します。こうした理解は、発振器の速度や出力を調整するための設計ルールを提供します。
ロボット魚から自動仕分け機まで
このソフトエンジンの可能性を示すため、チームは発振器で柔軟な尾を駆動する小さなロボット魚を作りました。3Dプリントされた胴体内の小型電池が定常電力を供給し、スナップスルー機構がゆっくりとした加熱を水中で鋭い尾のひと振りに変換しました。ビデオ解析では、魚はエネルギーが蓄積される長い静止時間と、尾がスナップした際の突然の運動の爆発という段階的前進を示しました。次に研究者たちは、巧妙な機械的スイッチと配線配置だけで二つの発振器が交互に鏡像的にスナップするように連結しました。最後に、穴あき円盤の下に三つの発振器を組み込み、大小二種類の混合ボールを載せました。位相ずれした振動により小さいボールだけが穴を通り抜け、大きいボールは残ることで、センサーやマイクロチップを使わずに自動的にサイズ別選別を実現しました。
未来のスマート機器にとっての意義
本研究は、電子回路ではなく構造自体で”考える”小型・低電圧で協調性の高い機械システムを構築できることを示しています。ソフトな人工筋肉を工夫された梁形状と単純なスライディング接点と組み合わせることで、著者らはエネルギーを効率的に蓄積・放出し、電磁干渉に強く、複数連結して泳ぐや選別といった複雑な作業を実行できる発振器を作り出しました。平たく言えば、彼らは自らの形状と材料特性だけで自己運動・自己協調する新しい機械の作り方を示しました。こうした機械的に“賢い”システムは、従来のモーターや制御回路が使えない環境で安全かつ信頼して動作するソフトロボット、医療機器、産業機器の動力源となる可能性があります。
引用: Liu, H., Yan, B., Zhou, R. et al. An electrically controlled bistable oscillator based on liquid crystal elastomer. npj Soft Matter 2, 10 (2026). https://doi.org/10.1038/s44431-026-00026-9
キーワード: ソフトロボティクス, 人工筋肉, 機械的発振器, 液晶エラストマー, 電子機器不要の制御