Clear Sky Science · pl
Elektrosterowany bistabilny oscylator oparty na elastomerze ciekłokrystalicznym
Maszyny, które poruszają się same
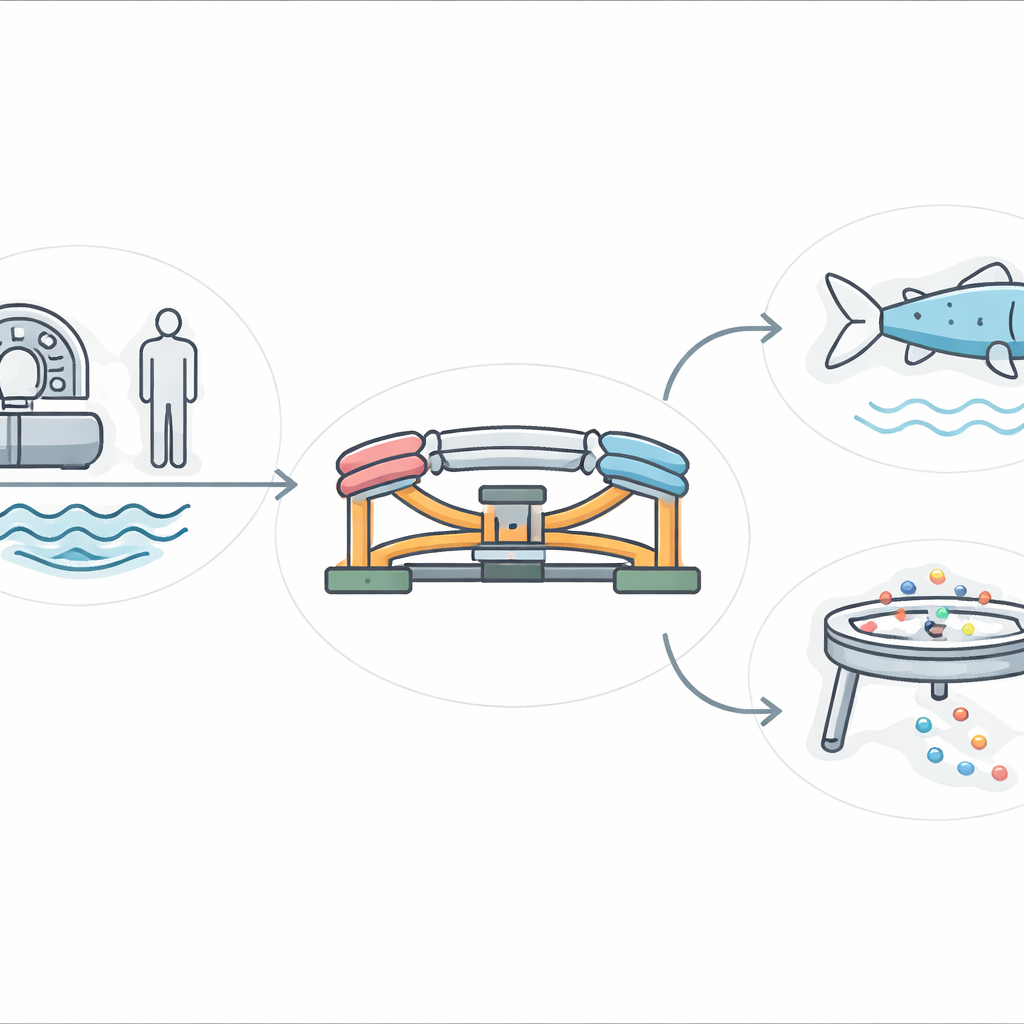
Wiele maszyn działających w naszych fabrykach, szpitalach i laboratoriach polega na silnikach elektrycznych i elektronice, by poruszać się tam i z powrotem w stałym rytmie. Jednak w miejscach o silnych polach magnetycznych, głęboko pod wodą, a nawet wewnątrz organizmu, ta sama elektronika może stać się nieporęczna, zawodna lub niebezpieczna. W badaniu przedstawiono nowy rodzaj samodzielnie rytmicznego, miękkiego „serca” wykonanego z gumowatych materiałów, które potrafi oscylować samodzielnie, korzystając jedynie z prostej baterii — otwierając tym samym możliwości dla bardziej odpornych i inteligentnych urządzeń działających tam, gdzie konwencjonalne silniki zawodzą.
Miękki silnik z dwoma pozycjami spoczynkowymi
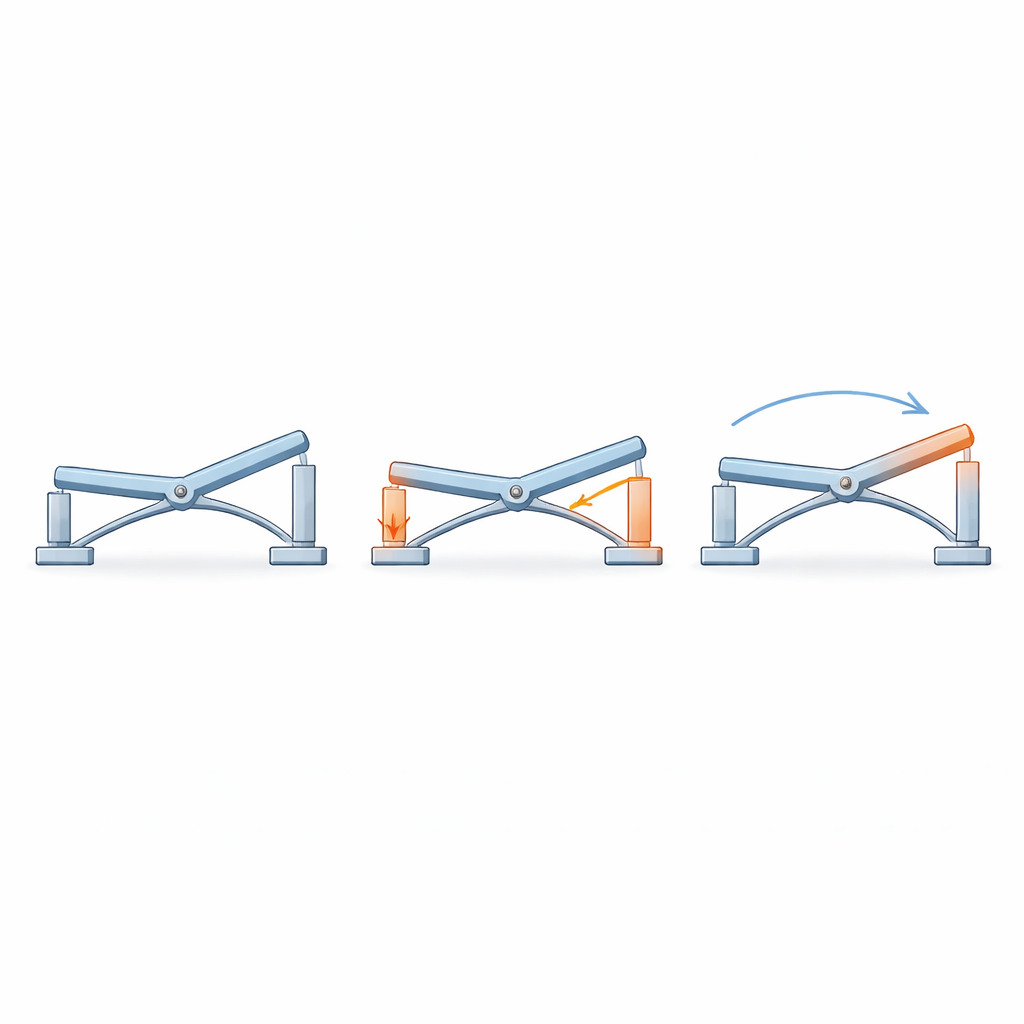
W centrum pracy znajduje się małe urządzenie mechaniczne zwane oscylatorem bistabilnym, które ma dwie preferowane pozycje spoczynkowe zamiast jednej. Autorzy zbudowali je wokół centralnego drążka bujanego podtrzymywanego przez dwa wstępnie wygięte plastikowe belki, niczym maleńka huśtawka trzymana między elastycznymi sprężynami. Po obu stronach drążka zamocowali pasek specjalnego materiału znanego jako elastomer ciekłokrystaliczny, który zachowuje się trochę jak sztuczny mięsień: podgrzewany elektrycznie kurczy się, a po ostygnięciu rozluźnia i wydłuża. Przesuwalny styk pod spodem działa jako czysto mechaniczny przełącznik, który decyduje, która strona jest w danym momencie zasilana. Razem te elementy tworzą zamkniętą pętlę, w której ruch i ogrzewanie stale na siebie wpływają bez potrzeby cyfrowego sterownika.
Jak miękkie mięśnie powodują przeskok
Kiedy jeden pasek elastomeru ciekłokrystalicznego jest ogrzewany przez niskie, stałe napięcie, powoli się kurczy i przyciąga drążek w swoją stronę. W miarę pochylania się drążka, wstępnie wygięte belki zginają się i magazynują energię sprężystą, podobnie jak nakręcana sprężyna. Gdy zostanie osiągnięty krytyczny kąt, belki nagle przeskakują do przeciwnego kształtu, uwalniając zgromadzoną energię w szybkim, silnym ruchu, który przeklina drążek do drugiej stabilnej pozycji. Ten nagły ruch przesuwa też styk, tak że zasilanie zostaje odcięte od pierwszego paska i podane na przeciwny. Proces powtarza się w odwrotnej kolejności: nowo zasilony pasek się nagrzewa i kurczy, belki gromadzą energię i wywołują kolejny przeskok. W ten sposób stałe zasilanie prądem stałym jest automatycznie przekształcane w ruch tam i z powrotem oraz w pulsujący sygnał elektryczny — wszystko sterowane przez mechanikę urządzenia.
Dostrajanie siły, prędkości i wytrzymałości
Naukowcy dokładnie przetestowali zachowanie sztucznych mięśni i konstrukcji nośnej. Zmieniając napięcie zasilania, wykazali, że paski elastomeru ciekłokrystalicznego mogą dostarczać duże, odwracalne skurcze i siły, wystarczające do niezawodnego wywołania przeskoku bez uszkadzania belek. Symulacje komputerowe pomogły dobrać odpowiednią długość, grubość i sztywność wygiętych plastikowych belkek tak, aby urządzenie miało dwa stabilne stany z wyraźnie określoną barierą energetyczną między nimi. Eksperymenty pokazały, że oscylator potrafi utrzymać kąt wychylenia i okres przez wiele cykli z jedynie niewielkimi zmianami, co świadczy o dobrej trwałości. Badania wykazały też, jak napięcie i grubość filmu wpływają na czasy nagrzewania i chłodzenia: wyższe napięcie i grubsze warstwy skracają fazę nagrzewania, podczas gdy chłodzenie pozostaje stosunkowo wolne, ostatecznie ograniczając maksymalną częstotliwość. To zrozumienie dostarcza reguł projektowych do ustawiania, jak szybko i jak silnie oscylator ma działać.
Od robotycznej ryby po maszyny sortujące same siebie
Aby zademonstrować możliwości miękkiego silnika, zespół zbudował małą robotyczną rybę, której ogon napędzał oscylator. Malutka bateria umieszczona w wydrukowanej w 3D obudowie dostarczała stałą moc, podczas gdy mechanizm przeskoku zamieniał powolne nagrzewanie w ostre porywy ogona w wodzie. Analiza wideo wykazała, że ryba poruszała się skokowo: długie przerwy, gdy gromadziła się energia, po których następowały gwałtowne wybuchy ruchu przy przeskoku ogona. Następnie badacze połączyli dwa oscylatory tak, by na przemian przeskakiwały w lustrzany sposób, wyłącznie dzięki sprytnemu rozmieszczeniu przełączników mechanicznych i przewodów. W końcu zmontowali trzy oscylatory pod perforowanym dyskiem z mieszanymi kulkami o dwóch rozmiarach. Wibracje z przesunięciem fazowym przepuściły mniejsze kulki przez otwory, pozostawiając większe, osiągając automatyczne sortowanie według wielkości bez użycia czujników czy układów scalonych.
Dlaczego to ma znaczenie dla przyszłych inteligentnych urządzeń
Praca pokazuje, że można zbudować kompaktowe, niskonapięciowe i wysoce współpracujące systemy mechaniczne, które „myślą” swoją strukturą zamiast elektroniką. Łącząc miękkie sztuczne mięśnie z umiejętnie ukształtowanymi belkami i prostymi stykami przesuwnymi, autorzy stworzyli oscylator, który efektywnie magazynuje i uwalnia energię, opiera się zakłóceniom elektromagnetycznym i może być łańcuchowany do realizacji złożonych zadań, takich jak pływanie czy sortowanie. Mówiąc prosto: pokazali nowy sposób tworzenia maszyn, które poruszają się i koordynują same, wykorzystując wyłącznie swoją geometrię i właściwości materiałowe. Takie mechanicznie inteligentne systemy mogą w przyszłości napędzać miękkie roboty, narzędzia medyczne i urządzenia przemysłowe działające bezpiecznie i niezawodnie tam, gdzie tradycyjne silniki i układy sterujące nie zdają egzaminu.
Cytowanie: Liu, H., Yan, B., Zhou, R. et al. An electrically controlled bistable oscillator based on liquid crystal elastomer. npj Soft Matter 2, 10 (2026). https://doi.org/10.1038/s44431-026-00026-9
Słowa kluczowe: miękka robotyka, sztuczne mięśnie, oscylatory mechaniczne, elastomery ciekłokrystaliczne, sterowanie bez elektroniki