Clear Sky Science · it
Un oscillatore bistabile controllato elettricamente basato su elastomero a cristalli liquidi
Macchine che si muovono da sole
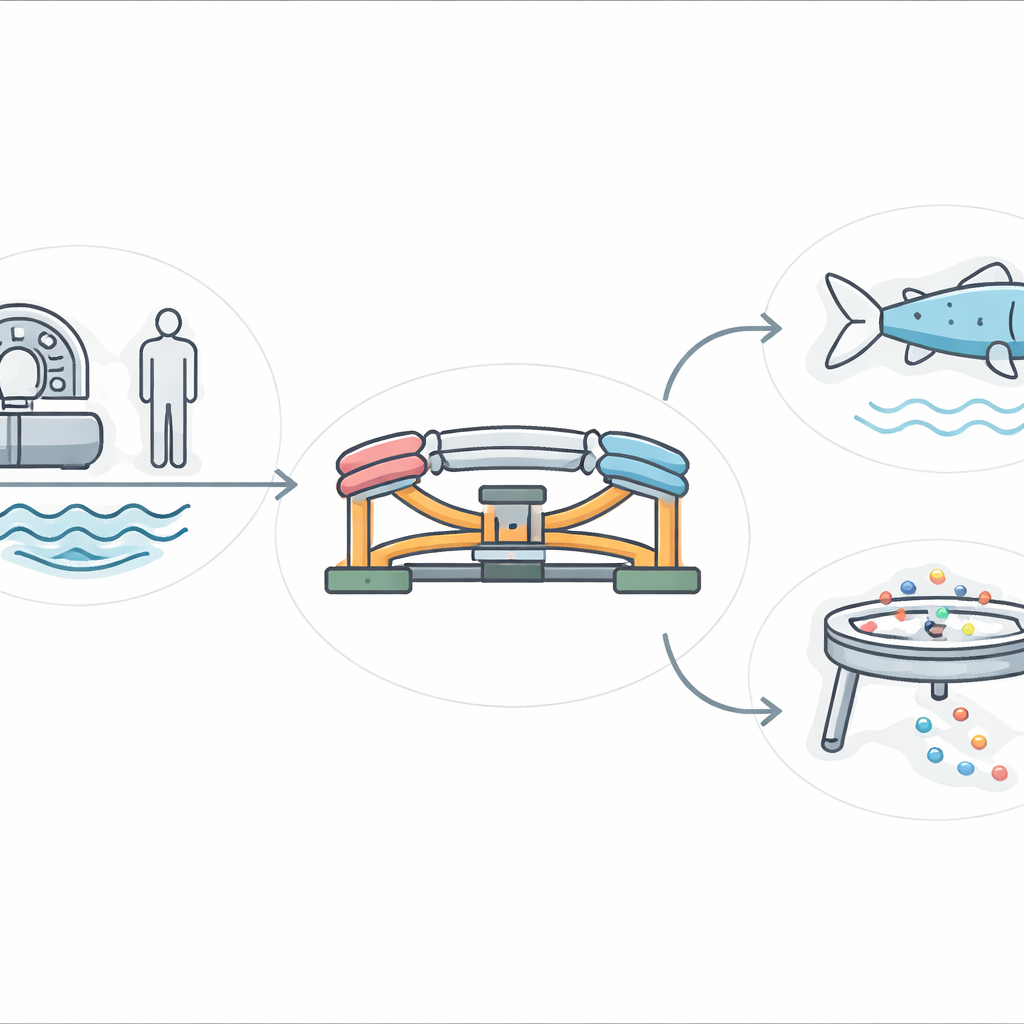
Molte delle macchine che mantengono operative le nostre fabbriche, ospedali e laboratori si appoggiano a motori elettrici ed elettronica per muoversi avanti e indietro con un ritmo costante. Tuttavia, in ambienti caratterizzati da campi magnetici intensi, in profondità sott’acqua o persino all’interno del corpo, quegli stessi componenti elettronici possono diventare ingombranti, inaffidabili o pericolosi. Questo studio introduce un nuovo tipo di “cuore” meccanico auto-oscillante realizzato con materiali morbidi e gommosi, in grado di oscillare autonomamente usando soltanto una batteria semplice, aprendo la strada a dispositivi più intelligenti e resilienti che funzionano dove i motori convenzionali fanno fatica.
Un motore morbido con due posizioni di riposo
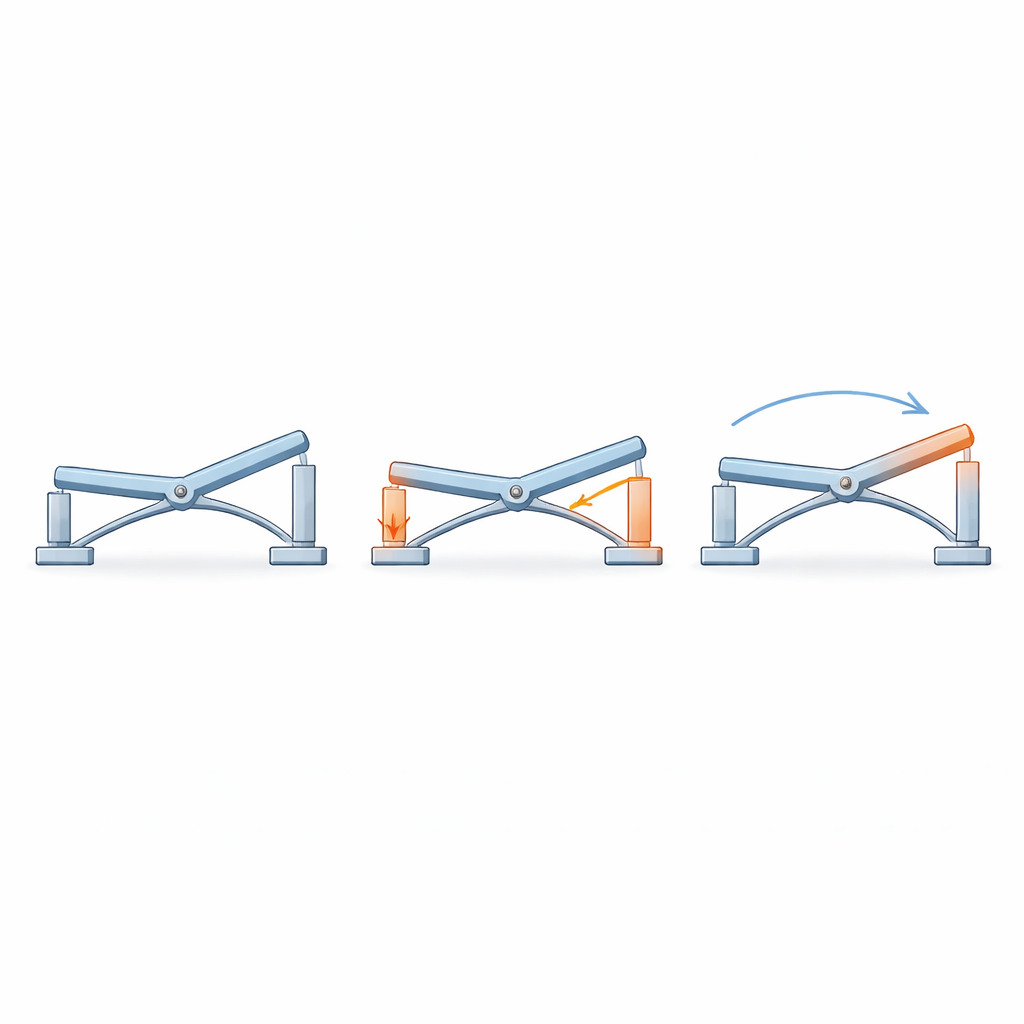
Al centro del lavoro c’è un piccolo dispositivo meccanico chiamato oscillatore bistabile, che possiede due posizioni di riposo preferite invece di una sola. Gli autori costruiscono questo dispositivo attorno a una barra centrale oscillante sostenuta da due travetti plastici precurvati, simile a un’altalena in miniatura tenuta tra molle flessibili. Su ciascun lato della barra è fissata una striscia di un materiale speciale noto come elastomero a cristalli liquidi, che si comporta un po’ come un muscolo artificiale: riscaldandosi elettricamente si contrae; raffreddandosi si rilassa e si allunga. Un contatto scorrevole sottostante funziona come un interruttore puramente meccanico che decide quale lato è alimentato in un dato momento. Insieme, questi elementi formano un circuito chiuso in cui il movimento e il riscaldamento si alimentano a vicenda senza alcun controllore digitale.
Come i muscoli morbidi fanno scattare il sistema
Quando una delle strisce di cristalli liquidi viene riscaldata da una bassa tensione costante, essa si contrae lentamente e tira la barra verso il suo lato. Man mano che la barra si inclina, i travetti precurvati si flettono e immagazzinano energia elastica, come quando si carica una molla. Raggiunto un angolo critico, i travetti improvvisamente attraversano la loro configurazione precedente e assumono la forma opposta, rilasciando l’energia accumulata in un movimento rapido e potente che capovolge la barra nella sua altra posizione stabile. Questo cambio rapido sposta anche il contatto scorrevole in modo che l’alimentazione venga tolta alla prima striscia e fornita a quella opposta. Il processo si ripete poi in senso inverso: la striscia ora alimentata si riscalda e si contrae, accumula energia nei travetti e innesca un altro scatto. In questo modo, un ingresso in corrente continua stabile viene automaticamente trasformato in un moto avanti e indietro e in un segnale elettrico a impulsi, il tutto governato dalla meccanica del dispositivo.
Regolare forza, velocità e resistenza
I ricercatori hanno testato con cura il comportamento dei muscoli artificiali e della struttura di supporto. Variando la tensione di alimentazione hanno dimostrato che le strisce a cristalli liquidi possono fornire contrazioni e forze ampie e reversibili, sufficienti a innescare in modo affidabile lo scatto senza danneggiare i travetti. Simulazioni al computer li hanno aiutati a selezionare la lunghezza, lo spessore e la rigidità adeguati dei travetti plastici curvati in modo che il dispositivo avesse due stati stabili con una barriera energetica ben definita tra di essi. Gli esperimenti hanno mostrato che l’oscillatore può mantenere l’angolo di oscillazione e il periodo per molti cicli con solo cambiamenti minori, dimostrando buona durabilità. Hanno anche mappato come tensione e spessore del film controllano i tempi di riscaldamento e raffreddamento: tensioni più alte e film più spessi riducono la fase di riscaldamento, mentre il raffreddamento rimane relativamente lento, limitando in ultima analisi la frequenza massima. Questa comprensione fornisce regole di progetto per regolare quanto velocemente e con quanta forza l’oscillatore si muove.
Dal pesce robotico alle macchine che si auto-selezionano
Per mostrare cosa può fare questo motore morbido, il team ha costruito un piccolo pesce robotico con l’oscillatore che aziona una coda flessibile. Una piccola batteria all’interno del corpo stampato in 3D forniva energia costante, mentre il meccanismo a scatto trasformava il riscaldamento lento in rapidi colpi di coda in acqua. L’analisi video ha mostrato che il pesce avanzava a scatti: lunghe pause mentre l’energia si accumulava, seguite da bruschi scoppi di moto quando la coda scattava. Successivamente, i ricercatori hanno collegato due oscillatori in modo che si alternassero nello scatto in modo speculare, soltanto tramite una disposizione intelligente di interruttori meccanici e fili. Infine, hanno assemblato tre oscillatori sotto un disco perforato che conteneva palline miste di due dimensioni. Le vibrazioni con sfasamento hanno convogliato le palline più piccole attraverso i fori lasciando indietro le più grandi, ottenendo una selezione automatica per dimensione senza sensori né microchip.
Perché questo è importante per i dispositivi intelligenti del futuro
Questo lavoro dimostra che è possibile costruire sistemi meccanici compatti, a bassa tensione e altamente cooperativi che “pensano” con la loro struttura anziché con l’elettronica. Combinando muscoli artificiali morbidi con travetti sagomati in modo intelligente e semplici contatti scorrevoli, gli autori creano un oscillatore che immagazzina e rilascia energia in modo efficiente, resiste alle interferenze elettromagnetiche e può essere messo in serie per compiti complessi come nuotare e selezionare. In termini concreti, mostrano un nuovo modo di realizzare macchine che si muovono e si coordinano autonomamente, sfruttando soltanto la propria geometria e le proprietà dei materiali. Sistemi meccanicamente intelligenti di questo tipo potrebbero a lungo termine alimentare robot morbidi, strumenti medici e dispositivi industriali che devono operare in modo sicuro e affidabile in contesti dove motori tradizionali e circuiti di controllo non sono utilizzabili.
Citazione: Liu, H., Yan, B., Zhou, R. et al. An electrically controlled bistable oscillator based on liquid crystal elastomer. npj Soft Matter 2, 10 (2026). https://doi.org/10.1038/s44431-026-00026-9
Parole chiave: robotica morbida, muscoli artificiali, oscillatori meccanici, elastomeri a cristalli liquidi, controllo senza elettronica