Clear Sky Science · he
מתנודד דו-יציב מבוקר חשמלית המבוסס על אלסטומר גבישי נוזלי
מכונות שנעות בעצמן
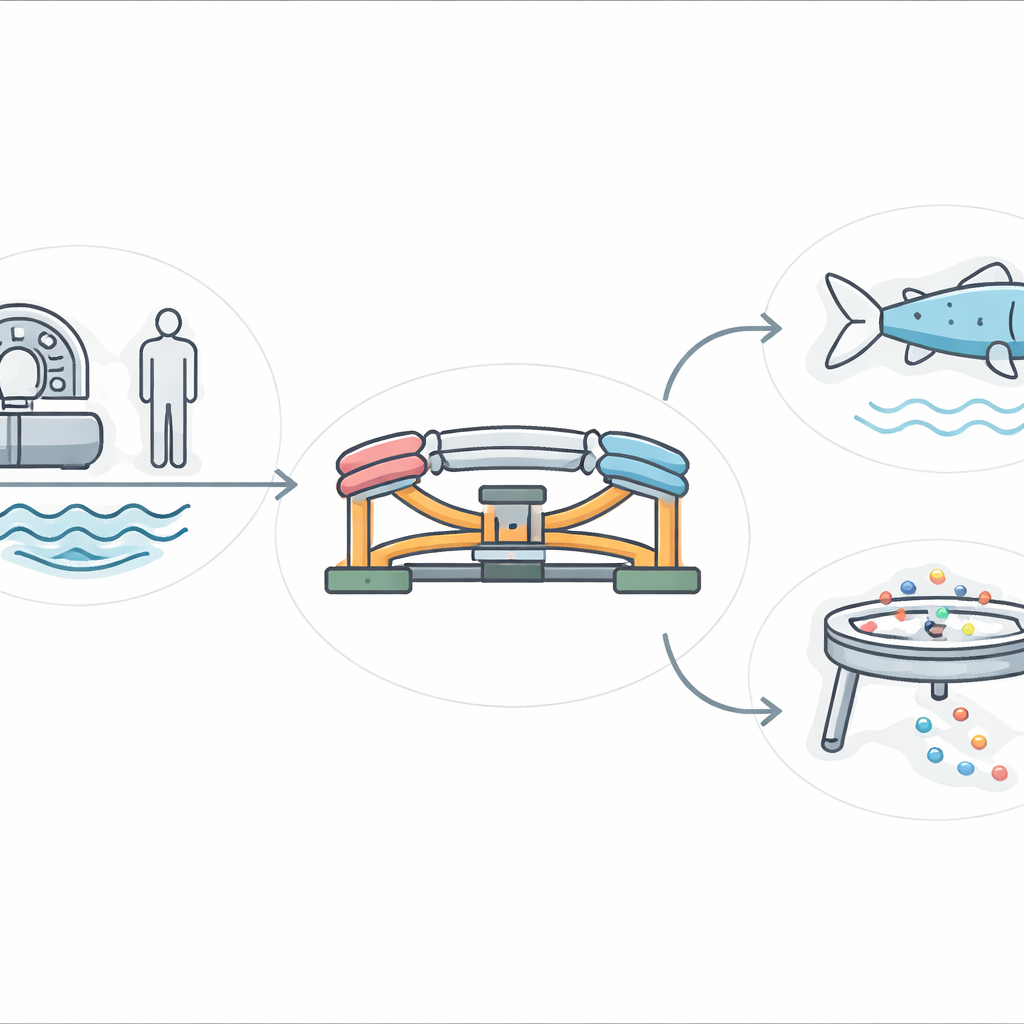
רבות מהמכונות המפעילות את המפעלים, בתי החולים והמִעבדות שלנו נשענות על מנועים חשמליים ואלקטרוניקה כדי לנוע קדימה ואחורה בקצב יציב. אך במקומות מלאי שדות מגנטיים חזקים, מתחת למים העמוקים או אפילו בתוך הגוף, אותה אלקטרוניקה עלולה להיות מגושמת, לא אמינה או בלתי בטוחה. המחקר הזה מציג סוג חדש של "לב" מכני שמתנודד מעצמו, עשוי מחומרים רכים וגמישים, שיכול לאוסילט בעזרת סוללה פשוטה בלבד — פתיחת אפשרויות למכשירים חכמים ועמידים הפועלים באזורים שבהם מנועים רגילים מתקשים.
מנוע רך עם שתי תנוחות מנוחה
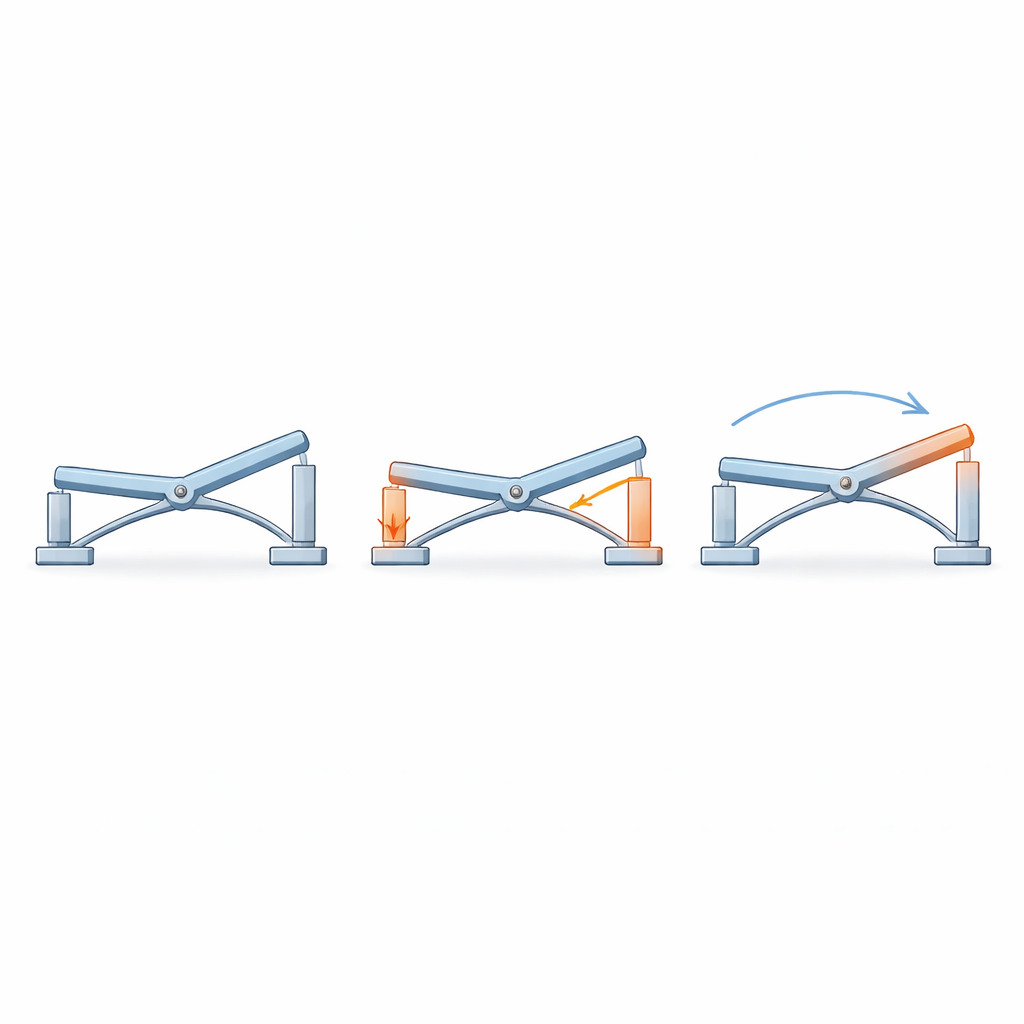
בלב העבודה עומד מתקן מכני קטן הנקרא מתנודד דו-יציב, שיש לו שתי תנוחות מנוחה מועדפות במקום אחת. הכותבים בונים את המכשיר סביב מוט מתנדנד מרכזי הנתמך על ידי שתי קורת פלסטיק מקושתות מראש, בדומה לעודן זעיר שמחזיק בין קפיצים גמישים. משני צדי המוט הם מחברים רצועות של חומר מיוחד המכונה אלסטומר גבישי נוזלי, שמתנהג מעט כמו שריר מלאכותי: כשהוא מתחמם חשמלית — הוא מתכווץ; כשהוא מתקרר — הוא מתרפה ומתארך. מגע מחליק מתחתיו משמש כמתג מכני טהור שקובע איזו צד מופעל בכל רגע. יחד כל הרכיבים יוצרים לולאה סגורה שבה התנועה והחימום מזינות אחת את השנייה ללא בקרה דיגיטלית.
איך השרירים הרכים גורמים למערכת "לקפוץ"
כאשר רצועת האלסטומר מתחממת על ידי מתח נמוך וקבוע, היא מתכווצת באיטיות ומושכת את המוט לכיוונה. כשהמוט נשאף, הקורות המקושתות מתכופפות ואוגרות אנרגיה אלסטית, בדומה להתיחה של קפיץ. ברגע שמושג זווית קריטית, הקורות פתאום משתנות לצורה הנגדית ומשחררות את האנרגיה האגור שבמהירות ובמכה חזקה, מה שממריץ את המוט לעמדת היציבות השנייה שלו. השינוי המהיר מעביר גם את המגע המחליק כך שההספק מנותק מהרצועה הראשונה ונמסר לרצועה השנייה. התהליך חוזר הפוך: הרצועה החדשה מתחממת ומתכווצת, אוגרת אנרגיה בקורות ומעוררת קפיצה נוספת. כך, קלט זרם ישר יציב מומר אוטומטית לתנועה סִיזיפית ולאות חשמלי בתדרים, הכל נשלט על ידי המכניקה של המכשיר עצמו.
כוונון עוצמה, מהירות ועמידות
החוקרים בדקו בקפידה כיצד השרירים המלאכותיים והמבנה התומך מתנהגים. על ידי שינוי המתח המניע הם הראו שרצועות האלסטומר יכולות לספק כיווצי ועוצמות גדולות וניתנות להפיכה, מספיק כדי לעורר את הקפיצות באופן אמין מבלי לפגוע בקורות. סימולציות ממוחשבות עזרו להם לבחור את האורך, העובי והנוקשות הנכונים של הקורות המוקשות כך שלמתקן יהיו שתי מצבי יציבות עם מחסום אנרגיה מוגדר היטב ביניהם. הניסויים הראו שהמתנודד יכול לשמור על זווית וסיבוב קבועים במשך מחזורים רבים עם שינויים מינוריים בלבד, דבר המעיד על עמידות טובה. הם גם מיפו כיצד מתח ועובי הסרט משפיעים על זמני חימום וקירור: מתח גבוה וסרטים עבים מקצרים את שלב החימום, בעוד הקירור נשאר איטי יחסית ומגביל בסופו של דבר את התדר המרבי. הבנה זו מספקת כללי תכנון לכוונון מהירות ועוצמת התנועה של המתנודד.
מדגמים — מדג דיגיטלי ועד מכונות שממוינות בעצמן
כדי להראות מה המנוע הרך יכול לעשות, הצוות בנה דג רובוטי קטן שבו המתנודד מניע זנב גמיש. סוללה זעירה בתוך הגוף המודפס בתלת־ממד סיפקה הספק קבוע, בעוד מנגנון ה"קפיצה" הפך חימום איטי להטלת זנב חדה במים. ניתוח וידאו הראה שהדג מתקדם בצעדים: הפסקות ארוכות בזמן שאנרגיה מצטברת, ואחריהן פרצי תנועה פתאומיים כשהזנב קופץ. בהמשך החוקרים קישרו שני מתנודדים כך שהם קופצים לסירוגין במראה זו מול זו, בלבד באמצעות סידור חכם של מתגים מכניים וכבלים. לבסוף הם הרכיבו שלושה מתנודדים מתחת לדיסק מנוקב שאחז כדורים מעורבים בשני גדלים. הרעידות בשלביות הוליכו כדורים קטנים דרך החורים בעוד שגדולים נותרו מאחור, וביצעו מיון אוטומטי על פי גודל ללא חיישנים או שבבים.
מדוע זה חשוב למכשירים חכמים בעתיד
העבודה מראה שאפשר לבנות מערכות מכניות קומפקטיות, נמוכות־מתח ובעלות שיתוף פעולה גבוה שחושבות בעזרת המבנה שלהן במקום בעזרת האלקטרוניקה. על ידי שילוב שרירים מלאכותיים רכים עם קורות מעוצבות במחשבה ומגעים מחליקים פשוטים, הכותבים יוצרים מתנודד שאוגר ומשחרר אנרגיה ביעילות, עמיד בפני הפרעות אלקטרומגנטיות וניתן לקישור לביצוע משימות מורכבות כמו שחייה ומיון. במילים פשוטות, הם מדגימים דרך חדשה ליצור מכונות שנעות ומתאמות בעצמן באמצעות הגיאומטריה ותכונות החומר שלהן בלבד. מערכות מכניות חכמות כאלו עשויות בעתיד להניע רובוטים רכים, כלים רפואיים ומכשור תעשייתי שצריכים לפעול בבטחה ובאמינות במקומות שבהם מנועים ומעגלי בקרה מסורתיים אינם מתאימים.
ציטוט: Liu, H., Yan, B., Zhou, R. et al. An electrically controlled bistable oscillator based on liquid crystal elastomer. npj Soft Matter 2, 10 (2026). https://doi.org/10.1038/s44431-026-00026-9
מילות מפתח: רובוטיקה רכה, שרירים מלאכותיים, מתנודים מכניים, אלסטומרים גבישיים נוזליים, בקרה ללא אלקטרוניקה