Clear Sky Science · nl
Een elektrisch bestuurbare bistabiele oscillator op basis van vloeibare-kristal-elastomeer
Machines die zichzelf in beweging zetten
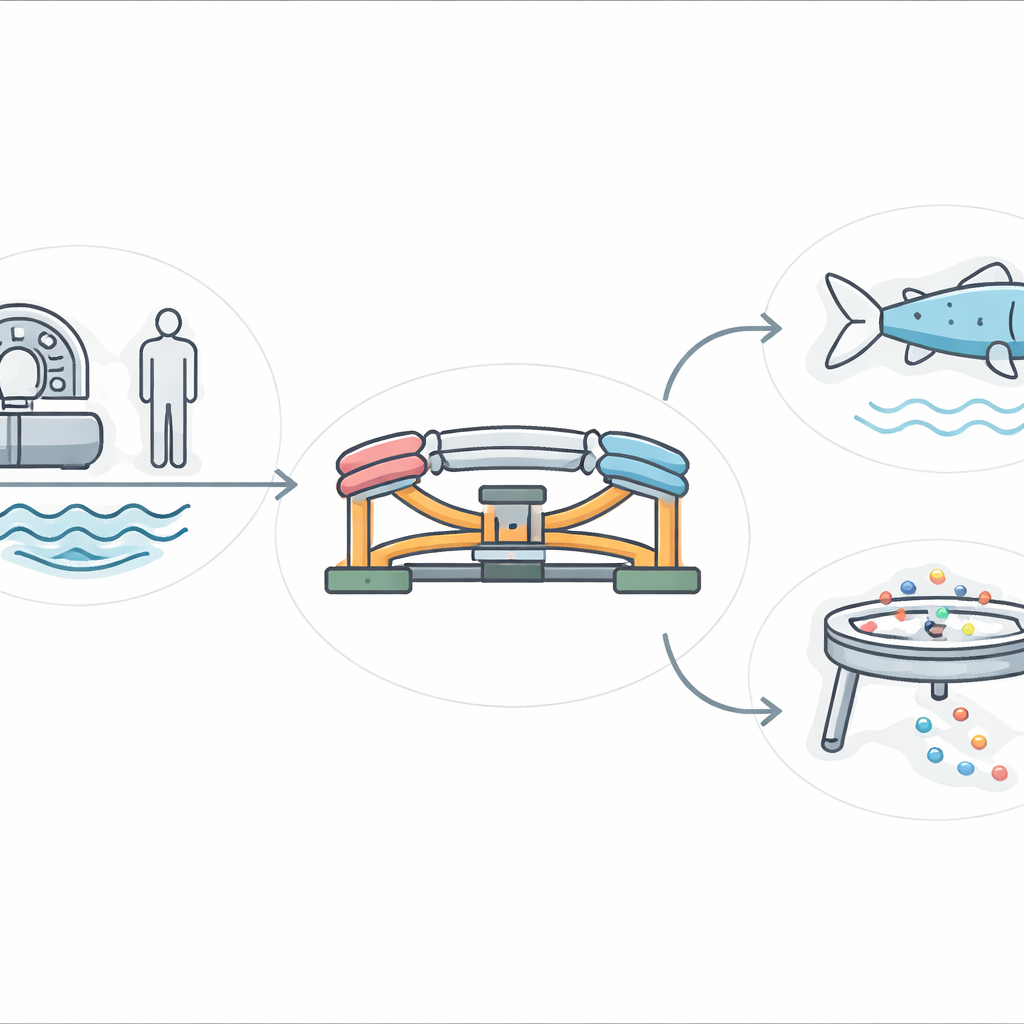
Veel van de machines die onze fabrieken, ziekenhuizen en laboratoria draaiende houden, vertrouwen op elektrische motoren en elektronica om in een gelijkmatig ritme heen en weer te bewegen. Maar op plekken met sterke magnetische velden, diep onder water of zelfs in het lichaam kunnen diezelfde elektronica omvangrijk, onbetrouwbaar of onveilig worden. Deze studie introduceert een nieuw soort zelf-slagend mechanisch "hart" gemaakt van zachte, rubberachtige materialen dat uit zichzelf kan oscilleren met alleen een simpele batterij, en zo de weg vrijmaakt voor slimmere, veerkrachtigere apparaten die kunnen werken waar conventionele motoren tekortschieten.
Een zachte motor met twee rustposities
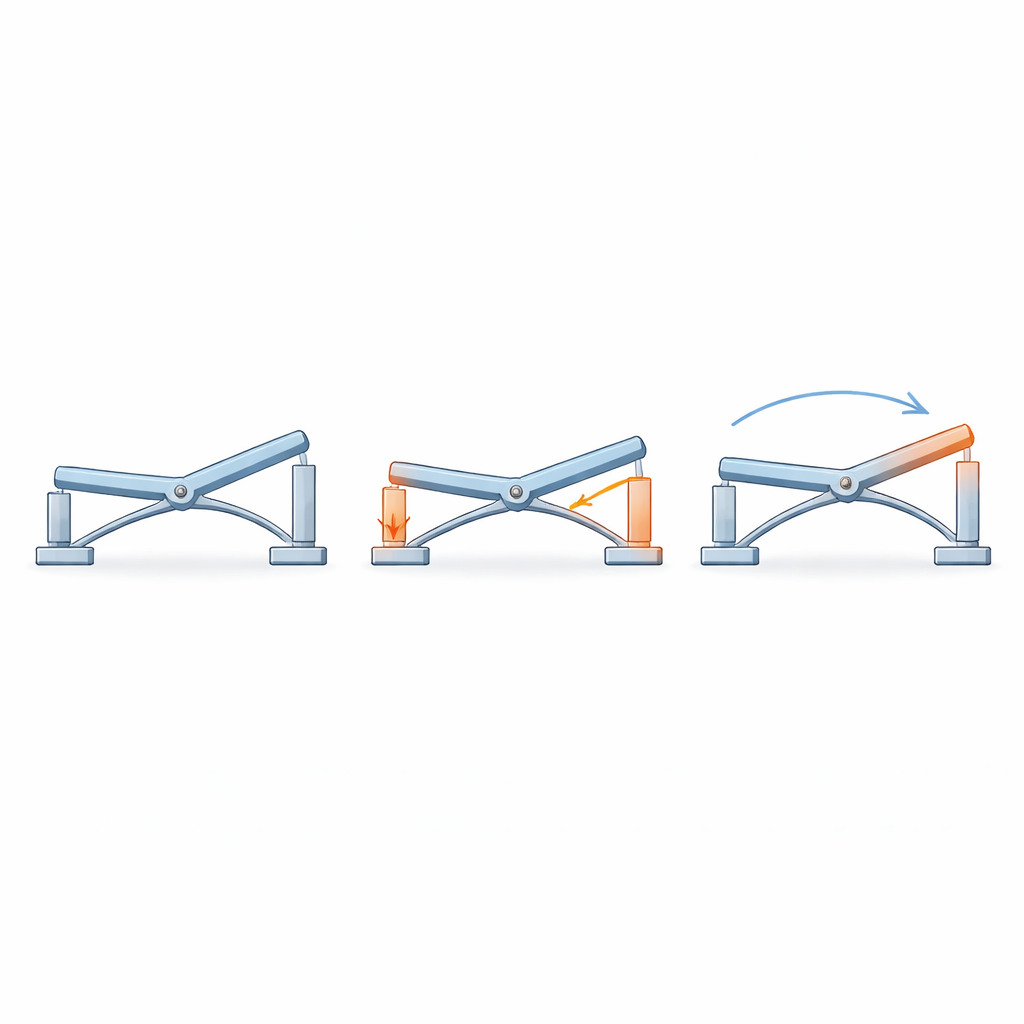
De kern van het werk is een klein mechanisch apparaat genaamd een bistabiele oscillator, dat twee voorkeursrustposities heeft in plaats van één. De auteurs bouwen dit apparaat rond een centrale wiekbalk die wordt ondersteund door twee voorgebogen kunststofbalken, als een klein wippertje vastgehouden tussen flexibele veren. Aan weerszijden van de balk bevestigen ze een strook van een speciaal materiaal dat bekendstaat als vloeibare-kristal-elastomeer, dat zich gedraagt als een kunstmatige spier: bij elektrische verwarming krimpt het; bij afkoeling ontspant het en wordt het langer. Een schuivende contactonderbreker onderaan fungeert als een puur mechanische schakelaar die bepaalt welke kant op dat moment van stroom wordt voorzien. Samen vormen deze onderdelen een gesloten lus waarin beweging en verwarming elkaar continu aandrijven zonder een digitale regelaar.
Hoe zachte spieren het systeem laten klikken
Wanneer één vloeibare-kristal-strook door een lage, constante spanning wordt verwarmd, trekt hij langzaam samen en trekt de wiek naar zijn kant. Naarmate de wiek kantelt, buigen de voorgebogen balken en slaan ze elastische energie op, vergelijkbaar met het opspannen van een veer. Zodra een kritische hoek wordt bereikt, schieten de balken plotseling door naar de tegenovergestelde vorm en geven ze hun opgeslagen energie vrij in een snelle, krachtige beweging die de wiek naar de andere stabiele positie kantelt. Deze snelle verandering verplaatst ook de schuivende contact zodat de stroom naar de eerste strook wordt onderbroken en naar de andere strook wordt geleid. Het proces herhaalt zich vervolgens omgekeerd: de nieuw gevoede strook verwarmt en krimpt, bouwt energie op in de balken en veroorzaakt opnieuw een snap-through. Op deze manier wordt een constante gelijkstroominvoer automatisch omgezet in heen-en-weer beweging en een gepulst elektrisch signaal, allemaal geregeld door de mechanica van het apparaat zelf.
Afstemmen van kracht, snelheid en uithouding
De onderzoekers onderzochten nauwkeurig hoe de kunstmatige spieren en de dragende structuur zich gedragen. Door de aandrijfspanning te variëren toonden ze aan dat de vloeibare-kristal-stroken grote, omkeerbare krimp en krachten kunnen leveren, voldoende om betrouwbaar door te schakelen zonder de balken te beschadigen. Computersimulaties hielpen hen de juiste lengte, dikte en stijfheid van de voorgebogen kunststofbalken te kiezen, zodat het apparaat twee stabiele toestanden zou hebben met een goed gedefinieerde energiedrempel ertussen. Experimenten lieten zien dat de oscillator zijn zwaaihoek en periode over vele cycli kon behouden met slechts geringe veranderingen, wat duidt op een goede duurzaamheid. Ze brachten ook in kaart hoe spanning en filmdikte de verwarmings- en afkoeltijden beïnvloeden: hogere spanning en dikkere films verkorten de verwarmingsfase, terwijl het koelen relatief traag blijft en uiteindelijk de maximale frequentie begrenst. Dit inzicht biedt ontwerprichtlijnen om te bepalen hoe snel en hoe krachtig de oscillator beweegt.
Van robotvis tot zelf-sorteerende machines
Om te laten zien wat deze zachte motor kan doen, bouwde het team een kleine robotvis met de oscillator die een flexibele staart aandrijft. Een kleine batterij in de 3D-geprinte romp leverde constante stroom, terwijl het snap-through-mechanisme langzame verwarming omzet in scherpe staartknikken in het water. Videoanalyse toonde dat de vis zich stapgewijs voortbewoog: lange pauzes terwijl energie zich ophoopte, gevolgd door plotselinge bewegingsexplosies wanneer de staart omsloeg. Vervolgens koppelden de onderzoekers twee oscillatoren zodat ze om beurten in spiegelbeeld snappen, puur via een slimme rangschikking van mechanische schakelaars en draden. Ten slotte plaatsten ze drie oscillatoren onder een geperforeerde schijf met gemengde balletjes in twee groottes. De faseverschuivende trillingen begeleidden kleinere balletjes door de gaten terwijl grotere achterbleven, waardoor automatische grootte-gebaseerde sortering werd bereikt zonder sensoren of microchips.
Waarom dit belangrijk is voor toekomstige slimme apparaten
Dit werk toont aan dat het mogelijk is compacte, laagspannings- en sterk samenwerkende mechanische systemen te bouwen die ‘‘denken’’ met hun structuur in plaats van met elektronica. Door zachte kunstmatige spieren te combineren met slim gevormde balken en eenvoudige schuivende contacten, creëren de auteurs een oscillator die energie efficiënt opslaat en vrijgeeft, bestand is tegen elektromagnetische interferentie en aan elkaar kan worden gekoppeld voor complexe taken zoals zwemmen en sorteren. In eenvoudige termen demonstreren ze een nieuwe manier om machines te maken die zichzelf bewegen en coördineren, uitsluitend gebruikmakend van hun geometrie en materiaaleigenschappen. Dergelijke mechanisch intelligente systemen zouden uiteindelijk soft robots, medische hulpmiddelen en industriële apparaten van stroom kunnen voorzien die veilig en betrouwbaar moeten werken op locaties waar traditionele motoren en besturingscircuits niet geschikt zijn.
Bronvermelding: Liu, H., Yan, B., Zhou, R. et al. An electrically controlled bistable oscillator based on liquid crystal elastomer. npj Soft Matter 2, 10 (2026). https://doi.org/10.1038/s44431-026-00026-9
Trefwoorden: soft robotics, kunstmatige spieren, mechanische oscillatoren, vloeibare-kristal-elastomeren, controle zonder elektronica