Clear Sky Science · de
Ein elektrisch gesteuerter bistabiler Oszillator auf Basis von flüssigkristallinem Elastomer
Maschinen, die sich selbst bewegen
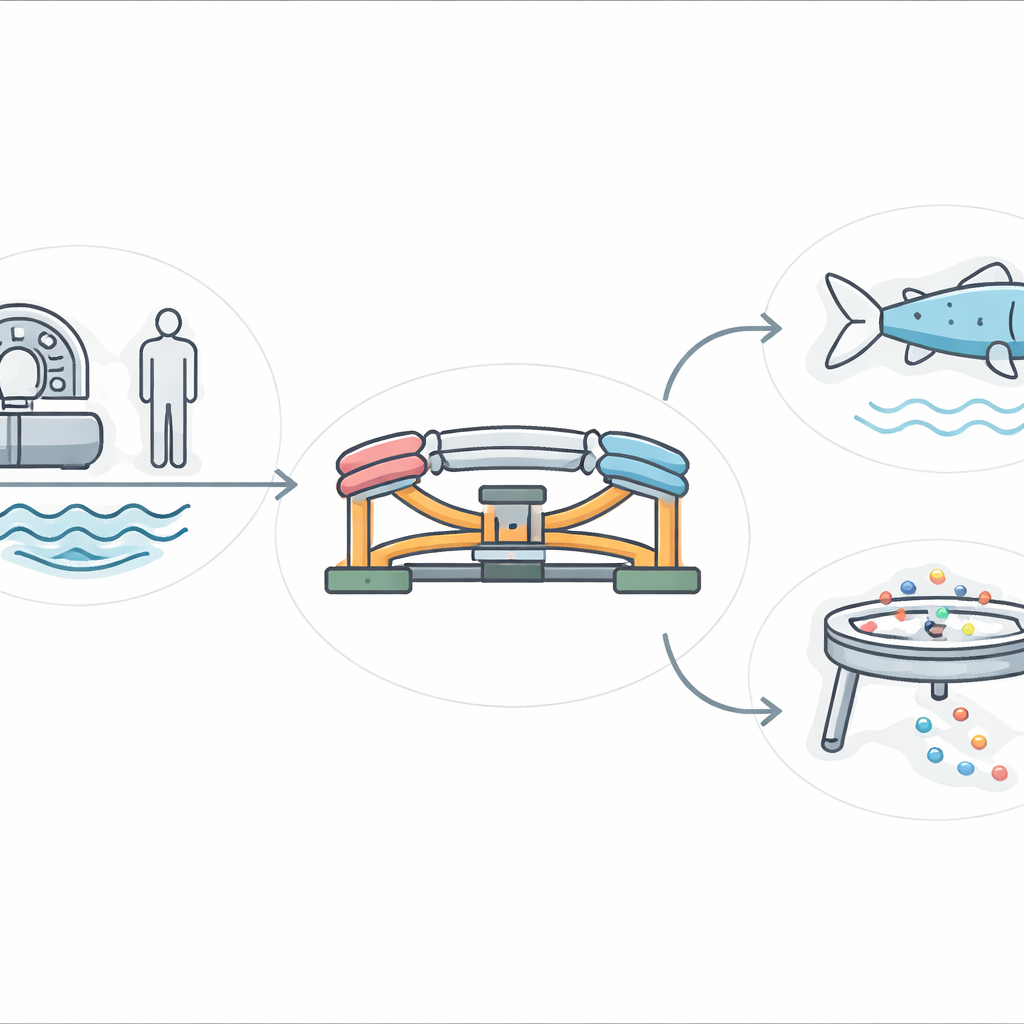
Viele der Maschinen, die unsere Fabriken, Krankenhäuser und Labore am Laufen halten, verlassen sich auf Elektromotoren und Elektronik, um sich in gleichmäßigem Rhythmus hin und her zu bewegen. In Umgebungen mit starken Magnetfeldern, in der Tiefe unter Wasser oder sogar im Inneren des Körpers können diese elektronischen Komponenten jedoch sperrig, unzuverlässig oder unsicher werden. Die vorliegende Studie stellt eine neue Art von sich selbst schlagendem mechanischem „Herzen" aus weichen, gummiartigen Materialien vor, das allein mit einer einfachen Batterie eigenständig oszillieren kann. Das eröffnet Möglichkeiten für intelligentere, widerstandsfähigere Geräte, die dort funktionieren, wo konventionelle Motoren an ihre Grenzen stoßen.
Ein weicher Motor mit zwei Ruhelagen
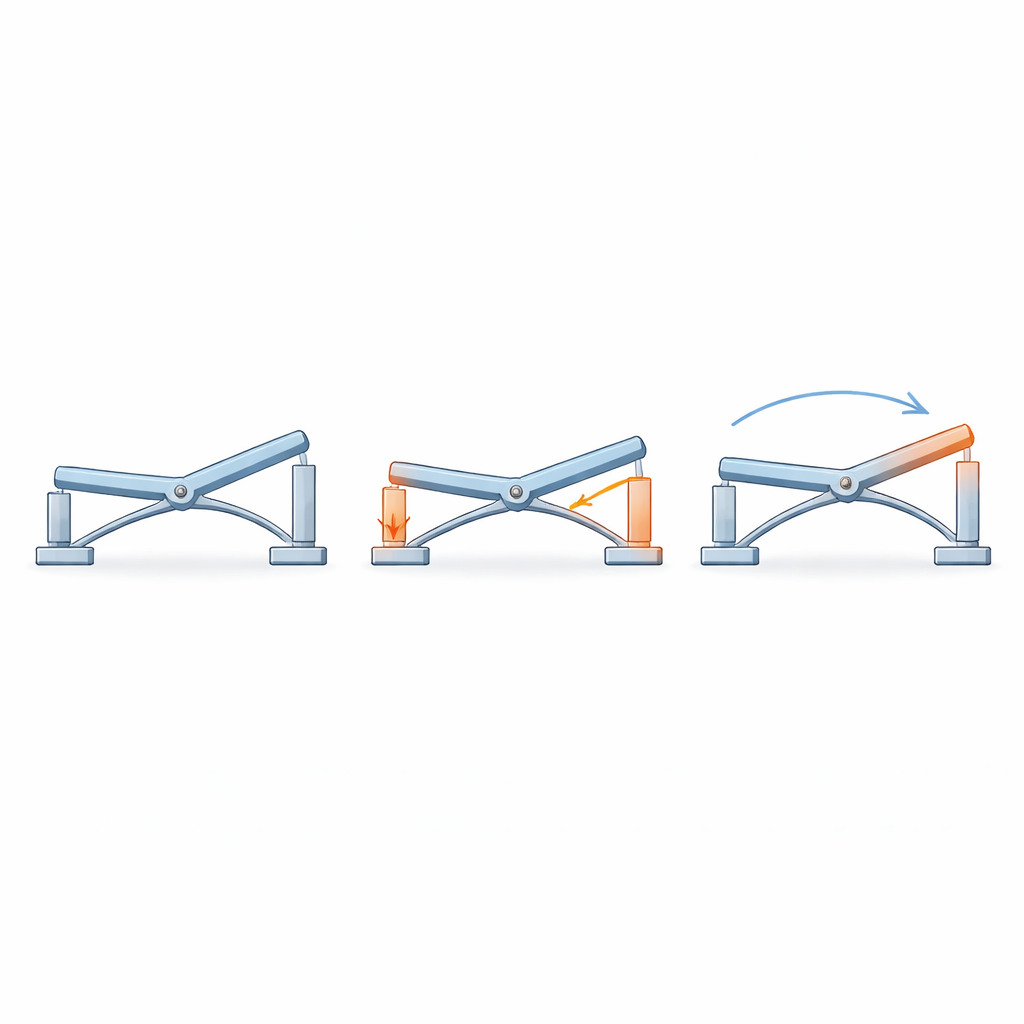
Im Kern der Arbeit steht ein kleines mechanisches Bauteil, ein bistabiler Oszillator, das zwei bevorzugte Ruhelagen statt nur einer besitzt. Die Autor:innen bauen dieses Bauteil um eine zentrale Kippe, die von zwei vorgespannten, gekrümmten Kunststoffbalken abgestützt wird – wie eine winzige Wippe, gehalten zwischen flexiblen Federn. An jeder Seite der Kippe ist ein Streifen eines speziellen Materials befestigt, eines flüssigkristallinen Elastomers, das sich wie ein künstlicher Muskel verhält: bei elektrischer Erwärmung kontrahiert es; beim Abkühlen entspannt es und wird länger. Ein unterhalb angebrachter gleitender Kontakt wirkt als rein mechanischer Schalter, der bestimmt, welche Seite gerade mit Strom versorgt wird. Zusammen bilden diese Elemente einen geschlossenen Regelkreis, in dem Bewegung und Erwärmung einander fortlaufend antreiben, ganz ohne digitalen Regler.
Wie weiche Muskeln das System klicken lassen
Wenn ein flüssigkristalliner Streifen durch eine niedrige, konstante Spannung erwärmt wird, zieht er sich langsam zusammen und zieht die Kippe auf seine Seite. Während die Kippe sich neigt, biegen sich die vorgekrümmten Balken und speichern elastische Energie, ähnlich dem Aufziehen einer Feder. Sobald ein kritischer Winkel erreicht ist, schnappen die Balken plötzlich in die entgegengesetzte Form durch und geben die gespeicherte Energie in einer schnellen, kraftvollen Bewegung frei, die die Kippe in die andere stabile Lage kippt. Diese schnelle Umkehr verschiebt auch den gleitenden Kontakt, sodass die Stromversorgung vom ersten Streifen getrennt und dem gegenüberliegenden zugeführt wird. Der Prozess wiederholt sich dann in umgekehrter Reihenfolge: der neu gespeiste Streifen erwärmt sich und kontrahiert, baut wieder Energie in den Balken auf und löst einen weiteren Durchschnapp aus. Auf diese Weise wird ein gleichmäßiger Gleichstrom automatisch in eine Hin- und Herbewegung und ein gepulstes elektrisches Signal umgewandelt, gesteuert allein durch die Mechanik des Geräts.
Stärke, Geschwindigkeit und Ausdauer einstellen
Die Forschenden prüften sorgfältig das Verhalten der künstlichen Muskeln und der tragenden Struktur. Durch Variieren der Antriebsspannung zeigten sie, dass die flüssigkristallinen Streifen große, reversible Kontraktionen und Kräfte liefern können — ausreichend, um das Durchschnappen zuverlässig auszulösen, ohne die Balken zu beschädigen. Computersimulationen halfen bei der Auswahl der richtigen Länge, Dicke und Steifigkeit der gekrümmten Kunststoffbalken, sodass das Gerät zwei stabile Zustände mit einer gut definierten Energiebarriere zwischen ihnen besitzt. Experimente zeigten, dass der Oszillator seinen Ausschlag und seine Periode über viele Zyklen mit nur geringen Veränderungen beibehält, was gute Haltbarkeit belegt. Außerdem kartierten sie, wie Spannung und Filmstärke die Heiz- und Abklingzeiten beeinflussen: Höhere Spannung und dickere Filme verkürzen die Heizphase, während das Abkühlen vergleichsweise langsam bleibt und letztlich die maximale Frequenz begrenzt. Dieses Verständnis liefert Gestaltungsregeln, um einzustellen, wie schnell und wie kräftig der Oszillator bewegt.
Von Roboterfischen bis zu sich selbst sortierenden Maschinen
Um die Fähigkeiten dieses weichen Motors zu demonstrieren, bauten die Forschenden einen kleinen Roboterfisch, dessen flexibler Schwanz vom Oszillator angetrieben wird. Eine winzige Batterie im 3D-gedruckten Körper lieferte konstante Energie, während der Durchschnappmechanismus langsame Erwärmung in scharfe Schwanzschläge im Wasser verwandelte. Videoanalysen zeigten, dass der Fisch in einem schrittweisen Muster vorankam: lange Pausen, während Energie ansammelte, gefolgt von plötzlichen Bewegungsexplosionen, wenn der Schwanz schnappte. Anschließend verbanden die Forschenden zwei Oszillatoren so, dass sie sich spiegelbildlich abwechselnd durchschnappen, allein durch eine clevere Anordnung mechanischer Schalter und Leitungen. Schließlich montierten sie drei Oszillatoren unter einer perforierten Scheibe, die gemischte Kugeln zweier Größen enthielt. Die phasenverschobenen Vibrationen geleiteten die kleineren Kugeln durch die Löcher, während größere zurückblieben — eine automatische, größenbasierte Sortierung ganz ohne Sensoren oder Mikrochips.
Warum das für zukünftige intelligente Geräte wichtig ist
Diese Arbeit zeigt, dass sich kompakte, niederohmige und hochgradig kooperative mechanische Systeme bauen lassen, die mit ihrer Struktur statt mit Elektronik „denken". Durch die Kombination weicher künstlicher Muskeln mit clever geformten Balken und einfachen Gleitschaltern schaffen die Autor:innen einen Oszillator, der Energie effizient speichert und freisetzt, elektromagnetische Störungen widersteht und sich für komplexere Aufgaben wie Schwimmen und Sortieren kaskadieren lässt. Einfach gesagt demonstrieren sie eine neue Methode, Maschinen zu bauen, die sich selbst bewegen und koordinieren, nur durch ihre Geometrie und Materialeigenschaften. Solche mechanisch intelligenten Systeme könnten künftig weiche Roboter, medizinische Instrumente und Industrieanlagen antreiben, die sicher und zuverlässig dort arbeiten müssen, wo traditionelle Motoren und Steuerkreise versagen.
Zitation: Liu, H., Yan, B., Zhou, R. et al. An electrically controlled bistable oscillator based on liquid crystal elastomer. npj Soft Matter 2, 10 (2026). https://doi.org/10.1038/s44431-026-00026-9
Schlüsselwörter: Soft Robotics, künstliche Muskeln, mechanische Oszillatoren, flüssigkristalline Elastomere, steuerung ohne Elektronik