Clear Sky Science · ru
Вычислительная система для предсказания и формирования взаимодействия человек–машина в замкнутых, соадаптирующих нейроинтерфейсах
Обучение машин учиться вместе с нами
По мере того как интерфейсы мозг–компьютер и продвинутые протезы выходят из лабораторий в повседневную жизнь, возникает ключевой вопрос: как проектировать устройства, которые учатся вместе с пользователем, одновременно с тем как пользователь учится ими пользоваться? В этом исследовании авторы решают эту задачу, создавая математическую и экспериментальную основу для «соадаптирующихся» нейроинтерфейсов — систем, в которых и человек, и алгоритм декодирования постоянно подстраиваются друг под друга, делая управление плавным, более естественным и надежным со временем. 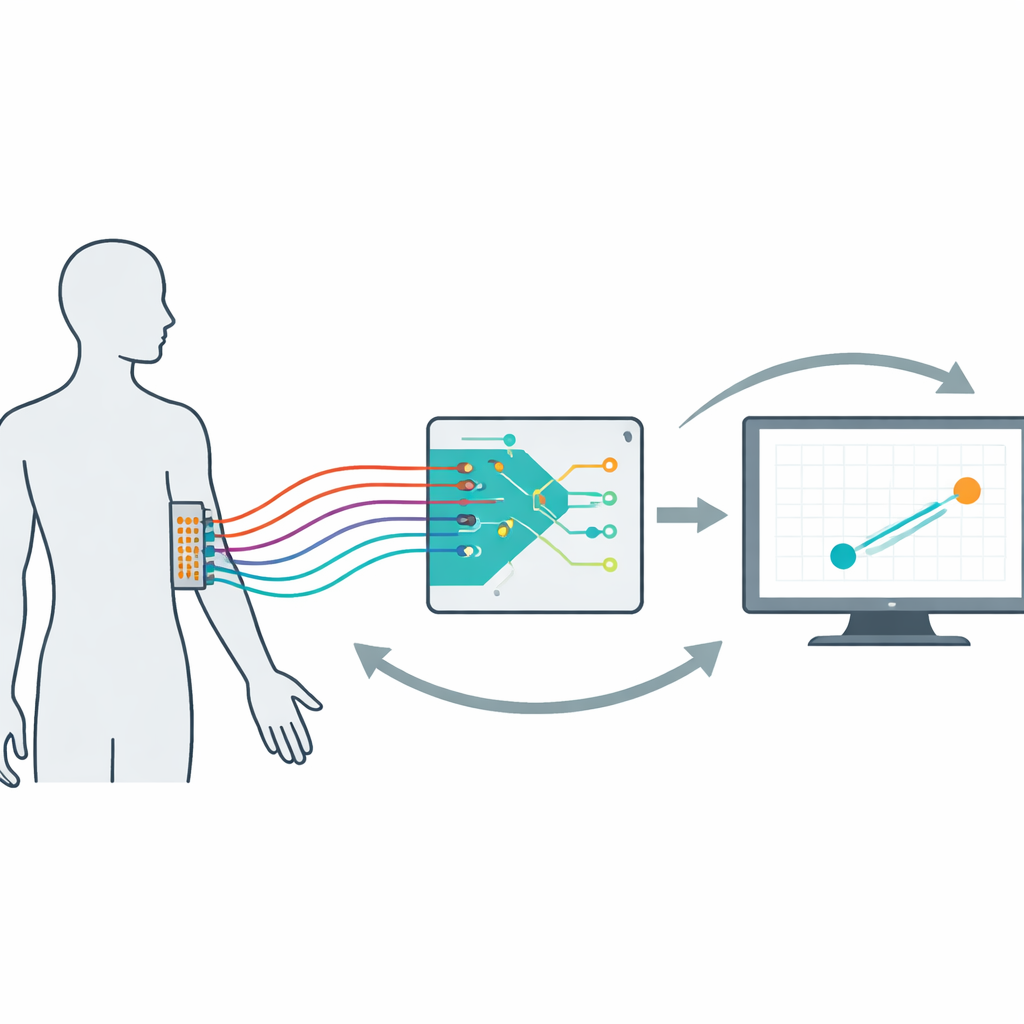
Новый тип партнерства человек–машина
Многие нейроинтерфейсы переводят высокоразмерные биологические сигналы, такие как активность мышц или мозга, в простые команды для управления курсором или роботизированной конечностью. Традиционно разработчики пытались оптимизировать либо человеческую сторону (обучая пользователя адаптироваться к фиксированному декодеру), либо машинную сторону (позволяя декодеру обновляться при предположении, что пользователь в основном статичен). На деле же обе стороны постоянно учатся. Такая «двухобучающаяся» система может обеспечить лучшую производительность и персонализацию, но её труднее проектировать: если алгоритм адаптируется слишком быстро или неверно, он может запутать пользователя, а не помочь. Авторы используют инструменты теории управления и теории игр, чтобы описать, предсказать и, в конечном счете, направлять эти переплетённые процессы обучения.
Создание безопасной тестовой площадки для соадаптивных интерфейсов
Чтобы исследовать эти динамики в контролируемых условиях, учёные создали неинвазивный миоэлектрический интерфейс. Четырнадцать добровольцев надевали сетку из 64 электродов на доминантное предплечье. Их мышечная активность управляла курсором на экране, который должен был следовать за блуждающей целью. Под капотом декодер преобразовывал мышечные сигналы в скорость курсора и обновлял себя каждые 20 секунд на основе недавней эффективности. В течение 16 пяти‑минутных испытаний на человека команда систематически варьировала скорость обучения декодера, степень штрафа за большие коэффициенты сигнала (его «усилие») и условия инициализации. Исследуя поведение и паттерны мышечной активности, они подтвердили, что пользователи не просто ждали улучшения алгоритма: они активно меняли способ использования мышц внутри и между испытаниями, создавая подлинную соадаптивную петлю человек–машина.
Применение теории управления для «взгляда внутрь» петли
Следующим шагом стало превращение этой сложной взаимосвязи в измеримую и проверяемую модель. Используя идеи из теории управления, авторы оценили компактное математическое описание стратегии каждого пользователя — «кодировщик», который отображает информацию о цели и курсоре в паттерны мышечной активности. Этот кодировщик можно было разделить на предсказательную, управляемую вперёд часть и корректирующую часть обратной связи. Объединив оценённый кодировщик с известным декодером, команда смогла оценить, движется ли вся система в сторону точного и стабильного управления. Они обнаружили, что со временем пара пользователь–декодер стремится к значениям, предсказываемым как обеспечивающие хорошее отслеживание и устойчивость, хотя ни пользователь, ни декодер полностью не переставали меняться. Пользователи также проявляли признаки долговременного обучения: их мышечные отображения менялись меньше от испытания к испытанию по мере роста мастерства. 
Теория игр показывает, как правила обучения формируют поведение
Чтобы выйти за рамки описания и действительно предсказать, как проектные решения повлияют на соадаптацию, авторы обратились к теории игр, изучающей взаимодействие нескольких принимающих решения субъектов, каждый из которых стремится минимизировать собственную стоимость. Они смоделировали пользователя и декодер как двух «игроков», которым важно уменьшить ошибку отслеживания, но которые также платят цену за усилия — активацию мышц для пользователя и большие коэффициенты для декодера. В этой модели совместная система может устояться в одном из нескольких устойчивых состояний или стационарных точек в зависимости от скоростей обучения, штрафов за усилия и начальных условий. Модель выдвинула конкретные предсказания: скорость обучения декодера сильно влияет на то, насколько быстро и качественно система сходится; изменение штрафа за усилие декодера должно сдвигать степень усилий, которые должен вкладывать пользователь, не обязательно меняя точность; а начальные настройки декодера могут тонко смещать итоговую стратегию пользователя.
Тестирование того, как алгоритмы направляют человеческое обучение
Эксперименты в основном подтвердили эти предсказания. Когда декодер обучался медленно, пользователи сильнее улучшали свои показатели в рамках одного испытания, а объединённая пара кодировщик–декодер двигалась ближе к теоретически идеальному режиму для точного и стабильного управления курсором. Когда декодер адаптировался слишком быстро, производительность снижалась, а пользователи меньше изменяли свои мышечные стратегии, что говорит о том, что машина двигалась быстрее, чем люди успевали подстроиться. Изменение штрафа за усилие декодера стало ещё одним рычагом: более высокие штрафы заставляли декодер работать менее интенсивно, что, в свою очередь, побуждало многих пользователей увеличить собственные мышечные усилия, чтобы сохранить точность. Интересно, что участники различались в том, как они балансировали усилие и скорость курсора — одни предпочитали больше трудиться, чтобы поддерживать быстроту, другие соглашались на более медленное движение ради экономии усилий — что указывает на индивидуальные предпочтения, которые будущие интерфейсы могли бы персонализировать.
Что это значит для будущих нейроинтерфейсов
Проще говоря, эта работа показывает, что правила обучения, заложенные в алгоритмы нейроинтерфейсов, делают больше, чем просто очищают шумные сигналы — они активно формируют то, как люди учатся пользоваться устройством. Сочетая строгое моделирование с экспериментами на людях, авторы предлагают набор инструментов для принципиального выбора скоростей обучения декодера, штрафов за усилие и инициализаций, вместо того чтобы полагаться на метод проб и ошибок. Их рамки могут направлять проектирование следующего поколения протезов, реабилитационных средств и интерфейсов мозг–компьютер, которые будут не только точными, но и устойчивыми, комфортными и адаптированными к стилю обучения каждого пользователя.
Цитирование: Madduri, M.M., Yamagami, M., Li, S.J. et al. Computational framework to predict and shape human–machine interactions in closed-loop, co-adaptive neural interfaces. Nat Mach Intell 8, 372–387 (2026). https://doi.org/10.1038/s42256-026-01194-z
Ключевые слова: нейроинтерфейсы, взаимодействие человек машина, соадаптивное управление, миоэлектрическое управление курсором, дизайн интерфейсов мозг‑компьютер