Clear Sky Science · ar
إطار حسابي للتنبؤ وتشكيل تفاعلات الإنسان–الآلة في واجهات عصبية حلقيّة التكيف المشتركة
تعليم الآلات أن تتعلّم معنا
مع انتقال واجهات الدماغ–الحاسوب والأطراف الاصطناعية المتقدمة من المختبر إلى الحياة اليومية، يبرز سؤال محوري: كيف نصمم أجهزة تتعلم منا في الوقت نفسه الذي نتعلم فيه استخدامها؟ تتناول هذه الدراسة هذا التحدي ببناء إطار رياضي وتجريبي لواجهات عصبية "تتكيف مشاركياً" — نظم يتكيف فيها كل من المستخدم البشري وخوارزمية فك التشفير باستمرار مع بعضهما بحيث يصبح التحكم أكثر سلاسة وطبيعية وموثوقية مع مرور الوقت. 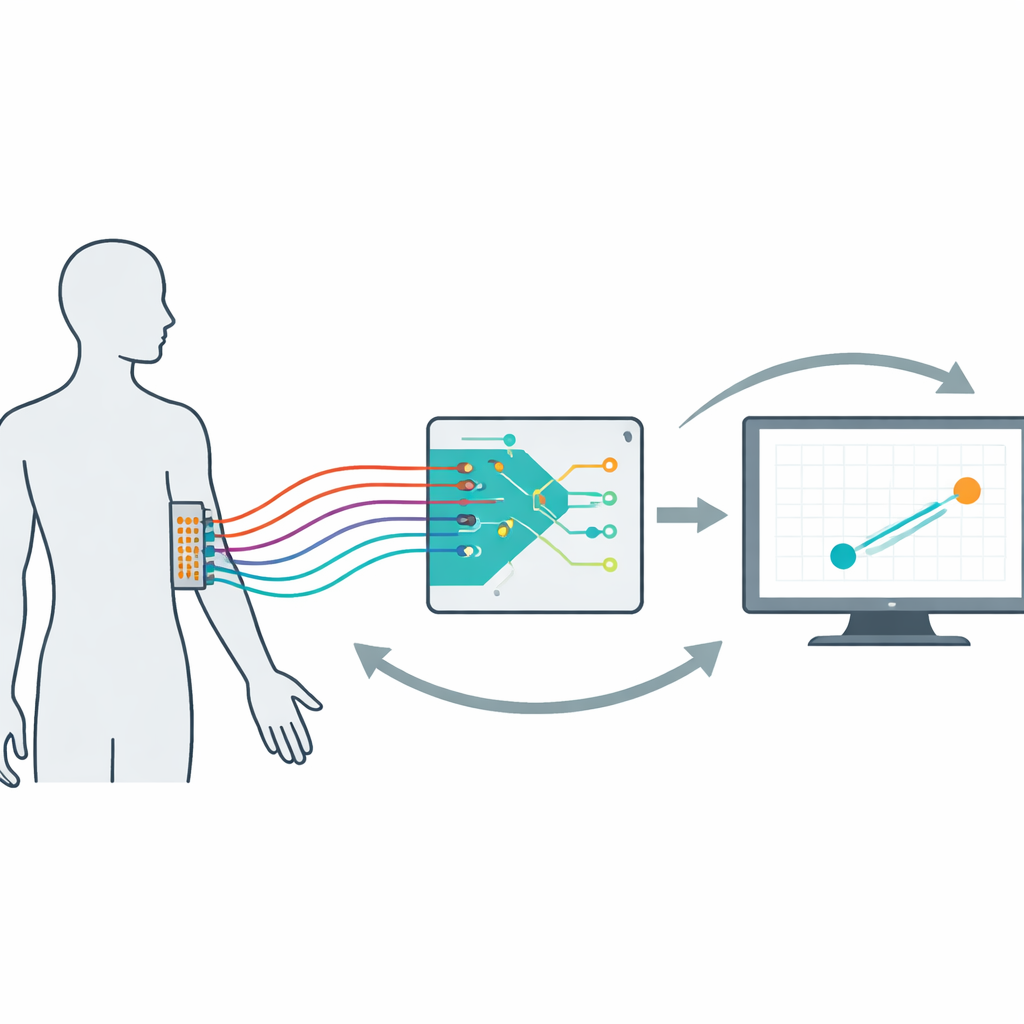
نوع جديد من الشراكة بين الإنسان والآلة
تعمل العديد من الواجهات العصبية بترجمة إشارات بيولوجية عالية البُعد، مثل نشاط العضلات أو الدماغ، إلى أوامر بسيطة يمكنها تحريك مؤشر أو طرف آلي. تقليدياً، حاول المصممون تحسين جانب واحد إما البشري (تدريب المستخدم على التكيف مع مفكك تشفير ثابت) أو الآلة (ترقية المفكك مع افتراض بقاء المستخدم شبه ثابت). في الواقع، كلا الجانبين يتعلّمان باستمرار. يمكن لهذا التكوين ذي المتعلّمَين أن يفتح أداءً أفضل وتخصيصاً أعلى، لكنه أيضاً أصعب في التصميم: إذا تكیّفت الخوارزمية بسرعة كبيرة أو بطريقة خاطئة، فقد تربك المستخدم بدلاً من أن تساعده. يجمع المؤلفون أدوات من نظرية التحكم ونظرية الألعاب لوصف هذه العمليات التعلمية المتشابكة والتنبؤ بها وفي النهاية تشكيلها.
بناء بيئة اختبار آمنة للواجهات التكيفية المشتركة
لدراسة هذه الديناميكيات بطريقة مضبوطة، أنشأ الباحثون واجهة ميوإلكتريك (كهرباء العضلات) غير غازية. ارتدى أربعة عشر متطوعاً شبكة مكونة من 64 قطباً على ساعدهم المسيطر. حرك نشاط عضلاتهم مؤشر الحاسوب الذي كان عليه متابعة هدف متجول على الشاشة. داخلياً، حول مفكك التشفير إشارات العضلات إلى سرعة المؤشر وحدّث نفسه كل 20 ثانية استناداً إلى الأداء الأخير. عبر 16 تجربة مدة كل منها خمس دقائق لكل شخص، نوّع الفريق بشكل منهجي سرعة تعلم المفكك، مدى معاقبته لاستخدام مكاسب إشارة كبيرة (ما أسموه «الجهد»)، وكيفية تهيئته. من خلال فحص السلوك وأنماط العضلات، أكدوا أن المستخدمين لم ينتظروا ببساطة تحسن الخوارزمية؛ بل غيّروا بنشاط كيفية استخدام عضلاتهم داخل التجارب وعبرها، مكونين حلقة تكيف مشترك حقيقية بين الإنسان والآلة.
استخدام نظرية التحكم لرؤية داخل الحلقة
كانت الخطوة التالية تحويل هذا التفاعل الفوضوي إلى نموذج يمكن قياسه واختباره. باستخدام أفكار من نظرية التحكم، قدّر المؤلفون وصفاً رياضياً مضغوطاً لاستراتيجية كل مستخدم — "مشفّراً" يربط معلومات الهدف والمؤشر بأنماط نشاط العضلات. يمكن فصل هذا المشفّر إلى جزء تغذوي متنبئ وجزء تصحيحي ارتدادي. بدمج المشفّر المقدَّر مع المفكك المعروف، تمكن الفريق من تقييم ما إذا كان النظام ككل يتجه نحو دقة واستقرار جيدين. وجدوا أنه مع مرور الوقت، يميل الزوج المكوَّن من المستخدم والمفكك إلى التحرك نحو قيم يُتوقَّع أن تمنح متابعة واستقراراً جيدين، رغم أن لا المستخدم ولا المفكك توقّفا عن التغيير تماماً. كما أظهر المستخدمون دلائل تعلم على المدى الطويل، حيث تقلّ تغيرات مطابقتهم العضلية من تجربة إلى أخرى مع تزايد كفاءتهم. 
تُظهر نظرية الألعاب كيف تشكّل قواعد التعلم السلوك
للانتقال من الوصف إلى التنبؤ الفعلي بكيفية تأثير اختيارات التصميم على التكيف المشترك، لجأ المؤلفون إلى نظرية الألعاب، التي تدرس تفاعل متخذين قرار متعددين عندما يحاول كل منهم تقليل كلفته الخاصة. نمذجوا المستخدم والمفكك باعتبارهما لاعبين اثنين يهتمان بتقليل خطأ المتابعة لكن أيضاً يدفعان ثمناً مقابل الجهد — تنشيط العضلات للمستخدم ومكاسب كبيرة للمفكك. وفي هذا الإطار، يمكن للنظام المشترك أن يستقر في إحدى عدة حالات ثابتة أو نقاط ساكنة، اعتماداً على معدلات التعلم، وعقوبات الجهد، وحالات البداية. قدّم النموذج توقعات ملموسة: ينبغي أن تؤثر سرعة تعلم المفكك بقوة على مدى سرعة وجودة تقارب النظام؛ وتعديل عقوبة جهد المفكك يجب أن يحوّل مقدار الجهد الذي يجب على المستخدم استثماره دون بالضرورة تغيير الدقة؛ وإعدادات المفكك الابتدائية قد تميل بخفة إلى تحييز استراتيجية المستخدم النهائية.
اختبار كيف تسيطر الخوارزميات على التعلم البشري
أكدت التجارب هذه التوقعات إلى حد كبير. عندما تعلم المفكك ببطء، تحسّن المستخدمون أكثر داخل التجربة، وتحرك زوج المشفّر–المفكك المدمج أقرب إلى النطاق المثالي نظرياً من أجل تحكم دقيق ومستقر بالمؤشر. عندما تكيف المفكك بسرعة مفرطة، تدهور الأداء وغّير المستخدمون استراتيجيات عضلاتهم أقل، مما يوحي أن الآلة كانت تتحرك أسرع مما يستطيع الناس مواكبته. قدّم تغيير عقوبة جهد المفكك رافعة أخرى: دفع العقوبات الأعلى المفكك للعمل بشكل أقل جهداً، مما دفع العديد من المستخدمين إلى زيادة جهد عضلاتهم للحفاظ على الدقة. ومن المثير للاهتمام أن المشاركين اختلفوا في كيفية موازنتهم بين الجهد وسرعة المؤشر — اختار بعضهم أن يعملوا بجهد أكبر للحفاظ على سرعة المؤشر، بينما قبل آخرون حركة أبطأ لتوفير الجهد — مما يلمّح إلى تفضيلات فردية يمكن للواجهات المستقبلية تخصيصها.
ماذا يعني هذا لواجهات عصبية مستقبلية
بعبارة بسيطة، تُظهر هذه الدراسة أن قواعد التدريب المدمجة في خوارزميات الواجهات العصبية تفعل أكثر من مجرد تنقية الإشارات الصاخبة؛ إنها تشكّل بنشاط كيفية تعلم الناس استخدام الجهاز. من خلال الجمع بين النمذجة الصارمة والتجارب البشرية، يقدّم المؤلفون مجموعة أدوات لاختيار معدلات تعلم المفكك، وعقوبات الجهد، وتهيئات البدء بطريقة مبدئية بدل الاعتماد على التجربة والخطأ. يمكن لإطارهم أن يوجّه تصميم الأطراف الاصطناعية من الجيل التالي، وأدوات إعادة التأهيل، وواجهات الدماغ–الحاسوب التي لا تكون دقيقة فحسب، بل أيضاً مستقرة ومريحة ومكيّفة وفق أسلوب تعلم كل مستخدم.
الاستشهاد: Madduri, M.M., Yamagami, M., Li, S.J. et al. Computational framework to predict and shape human–machine interactions in closed-loop, co-adaptive neural interfaces. Nat Mach Intell 8, 372–387 (2026). https://doi.org/10.1038/s42256-026-01194-z
الكلمات المفتاحية: واجهات عصبية, تفاعل الإنسان والآلة, التحكم التكيفي المشترك, تحكم مؤشر بواسطة الإشارات العضلية, تصميم واجهات الدماغ والحاسوب