Clear Sky Science · pl
Ramy obliczeniowe do przewidywania i kształtowania interakcji człowiek–maszyna w sprzężonych, ko-adaptacyjnych interfejsach nerwowych
Uczenie maszyn razem z nami
W miarę jak interfejsy mózg‑komputer i zaawansowane protezy przechodzą z laboratoriów do codziennego użytku, pojawia się kluczowe pytanie: jak projektować urządzenia, które uczą się od nas jednocześnie z tym, jak my uczymy się ich używać? To badanie podejmuje to wyzwanie, tworząc matematyczne i eksperymentalne ramy dla „ko‑adaptacyjnych” interfejsów nerwowych — systemów, w których zarówno użytkownik, jak i algorytm dekodujący nieustannie dostosowują się do siebie, tak by sterowanie stawało się płynniejsze, bardziej naturalne i bardziej niezawodne w czasie. 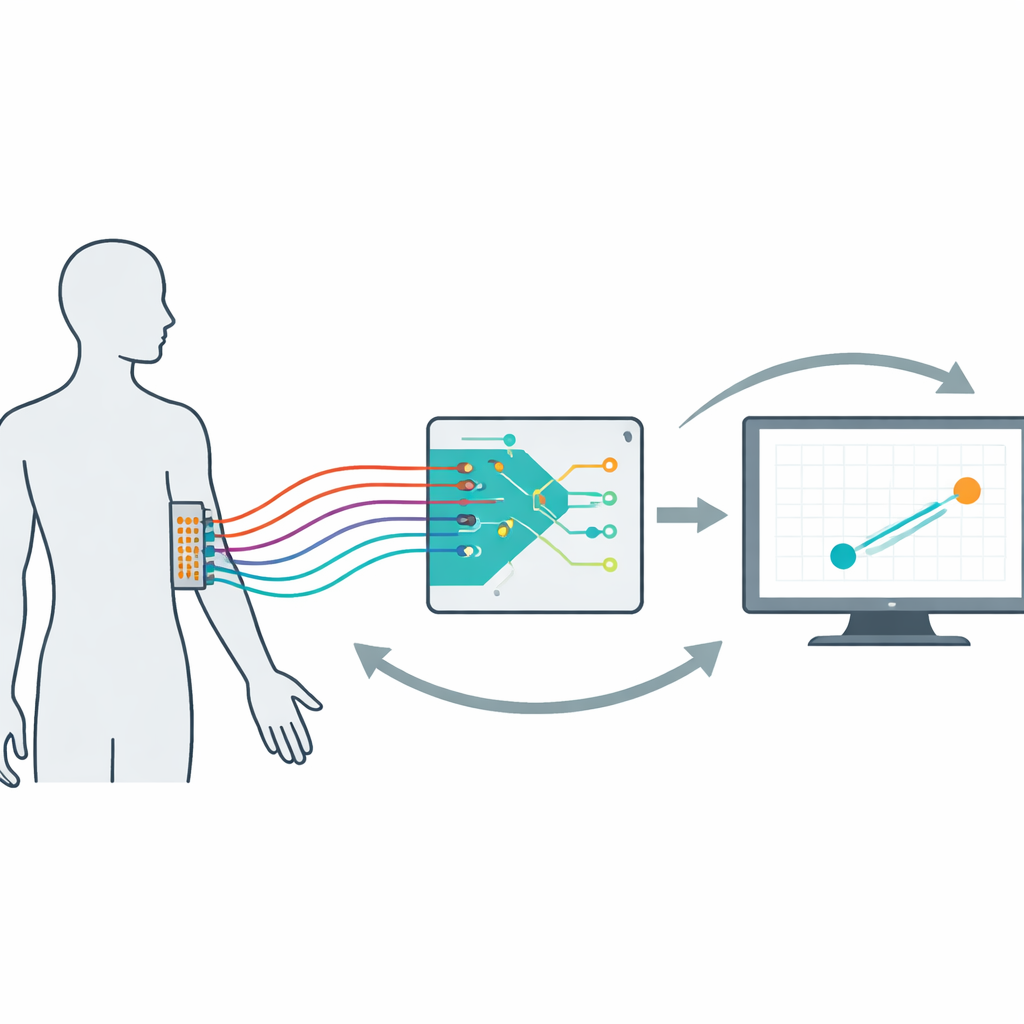
Nowy rodzaj partnerstwa człowiek–maszyna
Wiele interfejsów nerwowych działa przez przekształcanie wielowymiarowych sygnałów biologicznych, takich jak aktywność mięśni czy mózgu, na proste polecenia poruszające kursorem lub kończyną robotyczną. Tradycyjnie projektanci starali się optymalizować albo stronę ludzką (trenowanie użytkownika do dostosowania się do stałego dekodera), albo stronę maszynową (pozwalając dekoderowi się aktualizować przy założeniu względnie stałego użytkownika). W rzeczywistości obie strony ciągle się uczą. Taka konfiguracja dwóch uczących się podmiotów może uwolnić lepsze osiągi i personalizację, ale też jest trudniejsza do zaprojektowania: jeśli algorytm adaptuje się zbyt szybko lub w niewłaściwy sposób, może bardziej dezorientować niż pomagać. Autorzy łączą narzędzia teorii sterowania i teorii gier, aby opisać, przewidzieć i ostatecznie kształtować te splecione procesy uczenia się.
Budowa bezpiecznego poligonu do testów ko‑adaptacyjnych interfejsów
Aby badać te dynamiki w kontrolowany sposób, badacze stworzyli nieinwazyjny interfejs myoelektryczny. Czternaście ochotników nosiło siatkę 64 elektrod na dominującym przedramieniu. Ich aktywność mięśni sterowała kursorem na ekranie, który miał podążać za wędrującym celem. W tle dekoder przekształcał sygnały mięśniowe na prędkość kursora i aktualizował się co 20 sekund na podstawie ostatnich wyników. W ciągu 16 pięciominutowych prób na osobę zespół systematycznie zmieniał szybkość uczenia dekodera, siłę kary za stosowanie dużych wzmocnień sygnału (jego „wysiłek”) oraz sposób inicjalizacji. Analizując zarówno zachowanie, jak i wzorce mięśniowe, potwierdzili, że użytkownicy nie czekali biernie na poprawę algorytmu; aktywnie zmieniali sposób używania mięśni w trakcie i między próbami, tworząc prawdziwą pętlę ko‑adaptacyjną człowiek–maszyna.
Użycie teorii sterowania do zajrzenia w pętlę
Następnym krokiem było przekształcenie tego złożonego oddziaływania w model, który da się zmierzyć i przetestować. Wykorzystując idee z teorii sterowania, autorzy oszacowali zwartą matematyczną reprezentację strategii każdego użytkownika — „enkoder”, który mapuje informacje o celu i kursorku na wzorce aktywności mięśni. Ten enkoder można było rozdzielić na część predykcyjną, typu feedforward, oraz korygującą, typu feedback. Łącząc oszacowany enkoder ze znanym dekoderem, zespół mógł ocenić, czy cały system zmierza w kierunku dokładnego i stabilnego sterowania. Stwierdzili, że z czasem para użytkownik–dekoder miała tendencję do przesuwania się w stronę wartości przewidzianych jako sprzyjające dobremu śledzeniu i stabilności, choć ani użytkownik, ani dekoder nigdy nie przestawały się w pełni zmieniać. Użytkownicy wykazywali też oznaki długoterminowego uczenia się — ich mapowania mięśni zmieniały się mniej z próby na próbę w miarę zdobywania biegłości. 
Teoria gier pokazuje, jak reguły uczenia kształtują zachowanie
Aby pójść dalej niż opis i rzeczywiście przewidzieć, jak decyzje projektowe wpłyną na ko‑adaptację, autorzy zwrócili się ku teorii gier, badającej interakcje wielu decydentów, z których każdy stara się minimalizować własny koszt. Zmodelowali użytkownika i dekoder jako dwóch „graczy”, którym zależy na zmniejszeniu błędu śledzenia, ale którzy także ponoszą koszt wysiłku — aktywacji mięśni dla użytkownika i dużych wzmocnień dla dekodera. W tym ujęciu układ może osadzić się w jednym z kilku stanów stabilnych, czyli punktów stacjonarnych, w zależności od szybkości uczenia się, kar za wysiłek i warunków początkowych. Model formułował konkretne przewidywania: szybkość uczenia dekodera powinna silnie wpływać na tempo i jakość zbieżności; zmiana kary za wysiłek dekodera powinna przesuwać, ile wysiłku musi włożyć użytkownik bez koniecznej zmiany dokładności; a początkowe ustawienia dekodera mogą subtelnie wypośrodkować docelową strategię użytkownika.
Testowanie, jak algorytmy kierują ludzkim uczeniem
Eksperymenty w dużej mierze potwierdziły te przewidywania. Gdy dekoder uczył się wolno, użytkownicy poprawiali się bardziej w ramach pojedynczej próby, a para enkoder–dekoder zbliżała się do teoretycznie idealnego reżimu dla dokładnego i stabilnego sterowania kursorem. Gdy dekoder adaptował się zbyt szybko, wydajność spadała, a użytkownicy rzadziej zmieniali strategie mięśniowe, co sugeruje, że maszyna poruszała się szybciej, niż ludzie mogli za nią nadążyć. Zmiana kary za wysiłek dekodera dała kolejny dźwigniowy efekt: wyższe kary skłaniały dekoder do mniejszego wysiłku, co z kolei prowadziło wielu użytkowników do zwiększenia własnej aktywności mięśniowej, by utrzymać dokładność. Co ciekawe, uczestnicy różnili się w sposobie wyważania wysiłku i prędkości kursora — niektórzy woleli pracować ciężej, by utrzymać szybszy ruch, inni akceptowali wolniejsze przesuwanie, by oszczędzić wysiłek — co wskazuje na indywidualne preferencje, które przyszłe interfejsy mogłyby personalizować.
Co to oznacza dla przyszłych interfejsów nerwowych
Mówiąc prosto, praca ta pokazuje, że reguły treningowe wbudowane w algorytmy interfejsów nerwowych robią więcej niż tylko oczyszczają hałas sygnałów; aktywnie kształtują sposób, w jaki ludzie uczą się korzystać z urządzenia. Łącząc rygorystyczne modelowanie z eksperymentami na ludziach, autorzy dostarczają zestaw narzędzi do wyboru szybkości uczenia dekodera, kar za wysiłek i inicjalizacji w sposób zasadny, zamiast metodą prób i błędów. Ich ramy mogą kierować projektowaniem kolejnej generacji protez, narzędzi rehabilitacyjnych i interfejsów mózg‑komputer, które będą nie tylko dokładne, ale też stabilne, wygodne i dopasowane do stylu uczenia się każdego użytkownika.
Cytowanie: Madduri, M.M., Yamagami, M., Li, S.J. et al. Computational framework to predict and shape human–machine interactions in closed-loop, co-adaptive neural interfaces. Nat Mach Intell 8, 372–387 (2026). https://doi.org/10.1038/s42256-026-01194-z
Słowa kluczowe: interfejsy nerwowe, interakcja człowiek‑maszyna, sterowanie ko‑adaptacyjne, myoelektryczne sterowanie kursorem, projektowanie interfejsów mózg‑komputer