Clear Sky Science · ja
拡散ベースのマルチモーダルリモートセンシングセグメンテーションのための射影カーネル正則化
上空からより鮮明な地図を
現代の都市は、航空機や衛星の編隊によって上空から監視されており、カラー写真だけでなく3次元の高低情報も取得されています。この豊富なデータを建物、道路、樹木、車などの正確な地図に変換することは、都市計画、災害対応、環境監視にとって重要です。本稿は、これら異なる視点を融合し、ノイズの多い予測を洗練して、航空画像からより鮮明で信頼性の高いランドカバー地図を生成する新しい手法を紹介します。
空からの複数観測を混ぜる難しさ
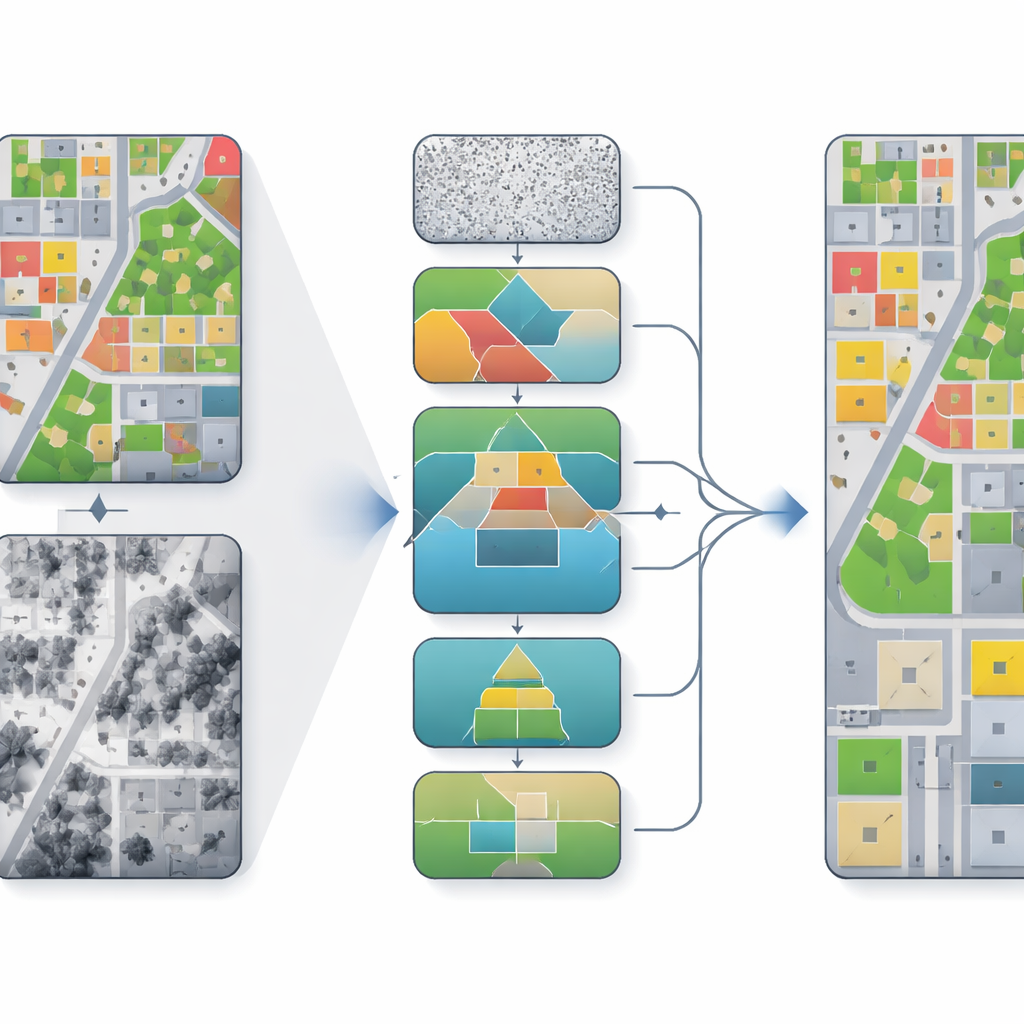
航空マッピングシステムは通常、真の正射投影画像(地表の詳細なカラー画像)と、各点の高さを記録するデジタル表面モデルという二つの主要な入力を組み合わせます。写真は質感や色の情報に富みますが、影や視点歪みによって歪むことがあります。高さマップは建物形状や樹冠を捉えますが、ノイズが多かったり粗かったりします。従来の深層学習手法はこれらを単純に重ねるか簡便な方法で融合することが多く、その結果、幾何と質感がずれたり、物体の境界がぼやけたり、特に密集した都市部で車などの小さな特徴を見落としたりすることがあります。
ノイズまみれの推定から洗練されたシーンへ
著者らは拡散モデルに基づく手法を発展させています。拡散モデルはノイズの入った予測から始め、繰り返し精緻化してよりきれいな結果に近づける一群のアルゴリズムです。セグメンテーションを一度きりの決定と見なす代わりに、モデルは多数の小さなステップを踏んでピクセルごとのクラス地図を段階的に改善します。彼らのフレームワークPKDiffでは、この精緻化が二つの主要な考え方で導かれます:写真と高さ情報をより賢く融合する方法、そしてピクセル単位だけでなく画像全体で予測の分布が期待と一致するようにする新しい手法です。
画像と高さ情報を協調させる仕組み
写真と高さデータの強みをより良く組み合わせるために、モデルはクロスアテンションデュアルエンコーダ融合モジュールを使用します。一つのブランチは色と質感に焦点を当て、もう一つは高さと構造を扱います。粗いスケールでは高さ情報が建物、道路、公園などの大まかな配置を正しく導きます。細かいスケールでは、エッジに沿った高さ差が屋根線や樹木と草地の境界などを鋭くするのに役立ちます。階層的EMAゲート付き再帰的デノイジングと呼ばれる別のデノイジングコンポーネントは、スケールと時間ステップを越えて情報を伝達し、新しい改良をどの程度信頼するかを判断します。これにより、初期の誤りが繰り返し増幅されるリスクが減ります。
個々のピクセルだけでなく大局を整合させる
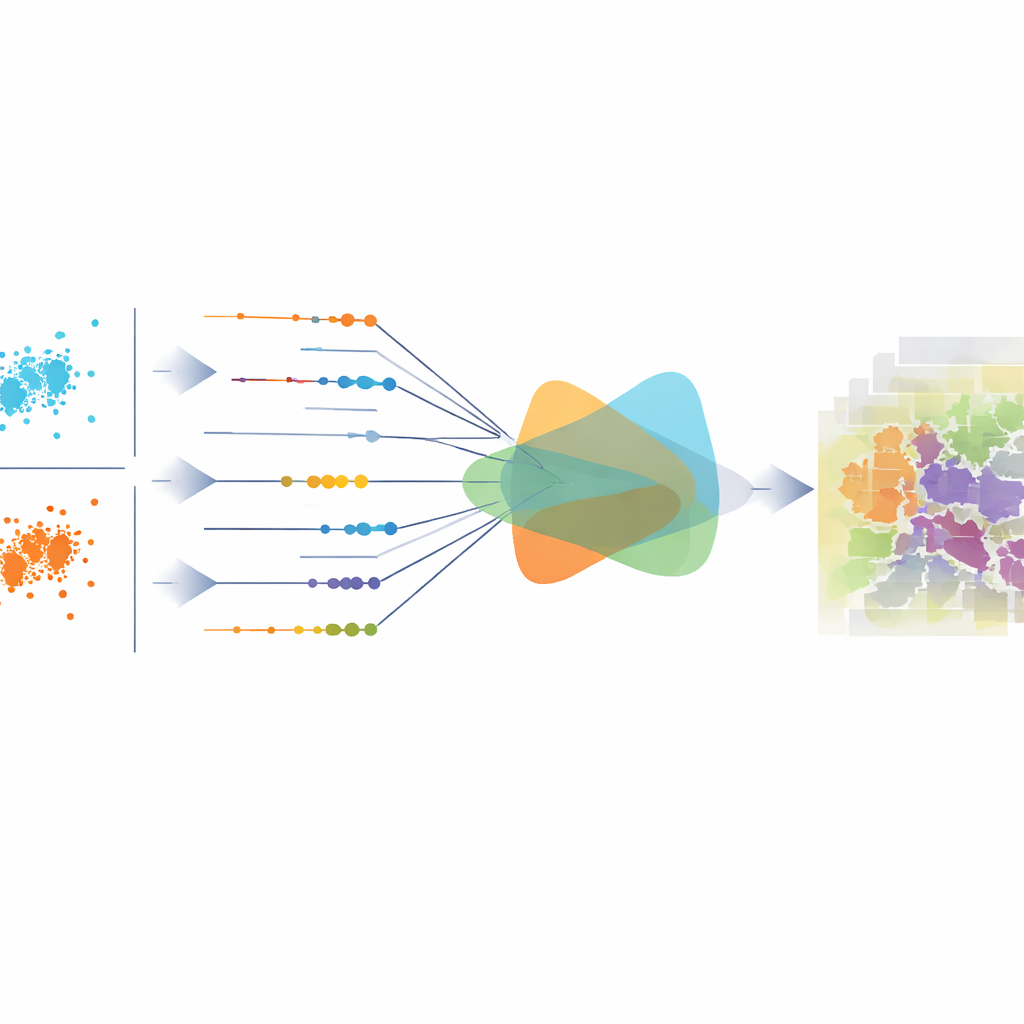
多くの既存手法はクロスエントロピーや平均二乗誤差のように各ピクセルを個別に見る損失関数でモデルを訓練します。これらは局所的な精度を高めますが、画像全体として統計的に不均衡な予測を生むことがあります(例えば道路を過大評価したり植生を過小評価したりする)。本研究の中心的貢献は、予測されたクラスの全体分布が真の分布とどれだけ一致しているかを測る射影カーネル正則化項です。これは各ピクセルのクラス確率を高次元空間の点として見なし、それらの点を多数の一次元方向に射影して、二つの射影集合がどう異なるかを比較します。これらの方向をランダムにサンプリングする代わりに、著者らは全方向にわたる差を効率的に集約するきれいな閉形式解を導出しており、この測度を安定かつ微妙な変化に敏感にしています。
より鮮明な境界と一貫した地図
著者らは、ドイツの町ヴァイヒンゲンとポツダムの二つのよく知られた都市ベンチマークで手法を評価しました。これらは非常に高解像度の画像と高さマップ、表面・建物・植生・樹木・車・雑多(クラッター)のグラウンドトゥルースラベルを含みます。いくつかの標準的な精度指標において、PKDiffは強力な畳み込み系、トランスフォーマベース、その他の拡散ベースモデルの範囲を上回りました。特に建物、低木、車のように幾何が重要なカテゴリで改善が顕著で、境界が鋭く、物体の断片化が少なく、道路などの大領域がより一貫してラベリングされます。簡潔に言えば、質感と高さを注意深く融合しつつ、予測が全体として「らしく」見えることを強制することで、提案手法は複雑な航空データからよりきれいで信頼できる地図を生成します。
引用: Tong, X., Yang, F., Yang, Q. et al. Projection Kernel regularization for diffusion-based multimodal remote sensing segmentation. Sci Rep 16, 14385 (2026). https://doi.org/10.1038/s41598-026-44603-4
キーワード: リモートセンシングセグメンテーション, マルチモーダル融合, 拡散モデル, 都市マッピング, 航空画像