Clear Sky Science · zh
一种混合真菌生长与差分进化算法用于MEC中节能无人机轨迹规划
为何更智能的无人机航线至关重要
数十亿台微小设备正在监测农作物、追踪心跳并管理红绿灯,但它们面临同样的问题:电池有限、计算能力有限。本文探讨了以装备小型数据中心的无人机为代表的飞行辅助器,如何更聪明地在空中移动以收集并处理这些设备的数据,同时减少能量浪费。通过借鉴真菌在土壤中扩展的方式并结合进化计算的思想,作者设计了一种规划方法,使无人机车队能够高效服务大量设备,而不会过度消耗自身或所支持设备的电量。
面向物联网的飞行辅助器
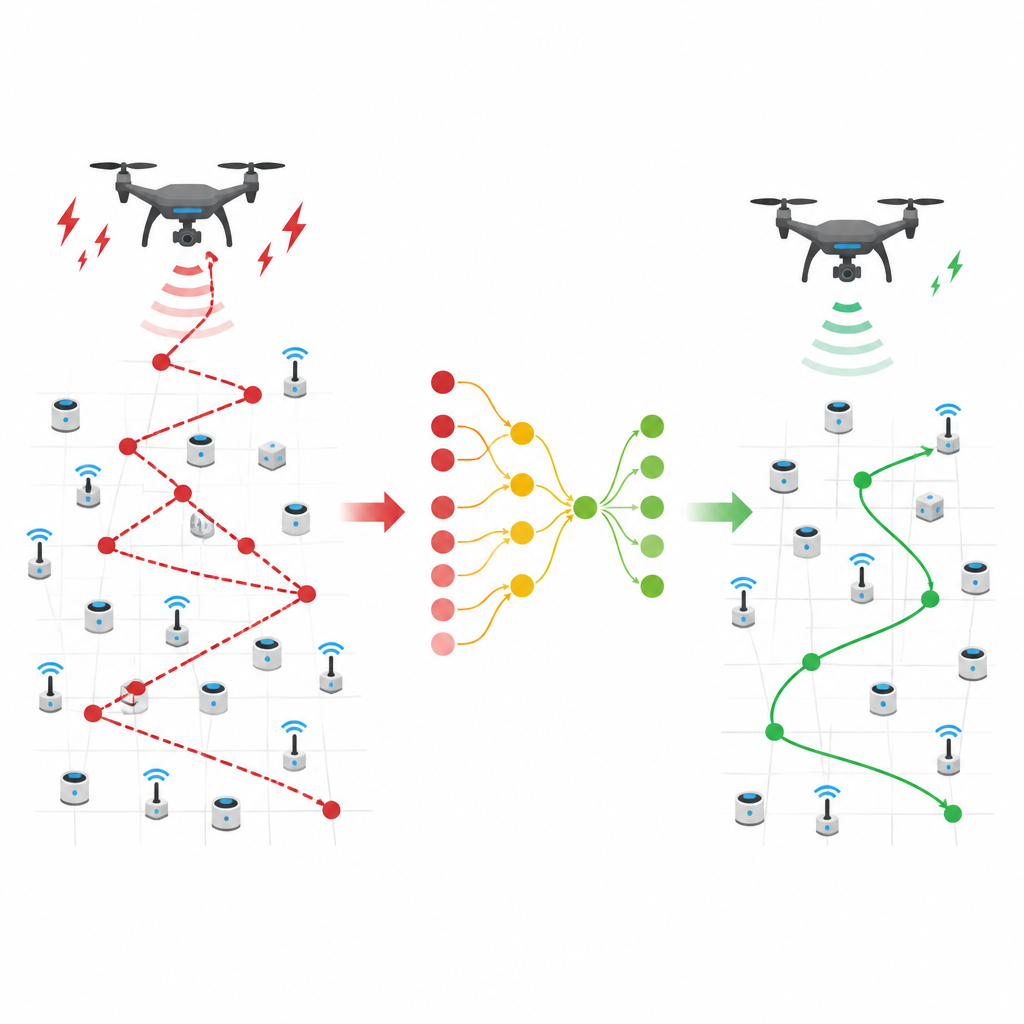
该研究描绘了一个未来场景:无人机携带计算设备靠近数据产生地点。与将信息发送到远端云服务器不同,附近的无人机可以快速接收、处理并返回结果,这一概念被称为移动边缘计算。在这种设置中,每架无人机沿由若干停驻点构成的路线飞行,在这些点停留以与地面设备通信。挑战在于决定需要多少个停驻点、将它们放置在哪里以及无人机应以何种顺序访问这些点,以便在按时完成所有任务的前提下,最大限度地减少无人机和地面设备的能耗。

将真菌生长转化为规划工具
为了解决这一难题,作者从真菌网络在土壤中为寻找养分而扩展的方式中获得灵感。真菌丝分支、避开贫瘠区域并集中在富集斑块周围。新算法称为FGODE,模拟这些行为以探索大量可能的无人机路线。与此同时,它加入了来自一种著名进化方法——差分进化的第二个要素,差分进化擅长抛光有前景的解。二者结合在一起平衡了大胆的探索与细致的优化,帮助无人机摆脱劣质路线并收敛到更优的方案。
对无人机停靠点的更智能编码
工作中的一个关键见解是:如何向计算机描述一个可能的路线会显著影响最终规划的质量。作者没有强制每个候选解携带一长串多数不会被使用的潜在停靠点,而是采用了一种紧凑的表示方式,使停靠点的数量和位置能够自然变化。简单的操作可以插入新点、删除不必要的点或用更好的候选点替换表现较差的点。额外的技巧,例如将停靠点贪心地串成短路径的规则以及少量随机扰动,使搜索保持多样性并有助于避免陷入平庸模式。
将该方法投入测试
研究者在计算机仿真中测试了FGODE:四架无人机服务于散布在一平方公里内的60到200台设备。他们将该方法与若干近期的规划和优化技术进行比较,包括自然启发算法和混合设计。在这些案例中,FGODE持续找到能减少无人机与设备总能耗的路线,同时在多次运行中表现出稳定性。统计检验证实其优势不太可能是偶然所得。此外,该算法比竞争方法更快收敛到优良路径,这意味着在现实可行的计算预算内它能提供强有力的规划结果。
这对互联系统意味着什么
对读者而言,结论是这项研究提供了一种切实可行的配方,用于引导无人机车队充当高效的空中数据快递。通过更审慎地塑造飞行路径,系统降低了地面设备为被听见而必须“喊”出的功率以及无人机停悬或飞行的时间,从而削减双方的能耗。尽管该工作在仿真中展示,但它指向更智能、更灵活的网络,在那里移动的飞行服务器可以在农场、城市和应急区域提供支持,而无需频繁更换电池或依赖重型基础设施,使大规模互联系统更具可持续性。
引用: Othman, A.A., Elmanakhly, D.A. A hybrid fungal growth and differential evolution algorithm for energy-efficient UAV trajectory planning in MEC. Sci Rep 16, 16454 (2026). https://doi.org/10.1038/s41598-026-54288-4
关键词: 无人机轨迹规划, 移动边缘计算, 物联网能效, 元启发式优化, 无人机数据采集