Clear Sky Science · he
אלגוריתם היברידי של צמיחת פטריות והתפתחות דיפרנציאלית לתכנון מסלולי רחפנים חסכוניים באנרגיה ב-MEC
למה מסלולים חכמים יותר לרחפנים חשובים
מיליארדי מכשירים קטנים עוקבים כיום אחרי שדות, מודדים קצב לב ומנהלים רמזורים, אך כולם מתמודדים עם אותה בעיה: מקורות אנרגיה מוגבלים וכוח מחשוב צנוע. מאמר זה חוקר כיצד עוזרים מעופפים, בצורת רחפנים המצוידים במרכזי נתונים קטנים, יכולים לנוע בחוכמה רבה יותר באוויר כדי לאסוף ולעבד מידע מהמכשירים הללו עם בזבוז אנרגיה מופחת. בהשראת אופן התפשטות הפטריות באדמה ובשילוב רעיונות מחשוב אבולוציוני, המחברים מעצבים שיטת תכנון שמאפשרת לציי רחפנים לשרת מכשירים רבים ביעילות מבלי לרוקן את הסוללות שלהם או של המכשירים שהם תומכים בהם.
עוזרים מעופפים לאינטרנט של הדברים
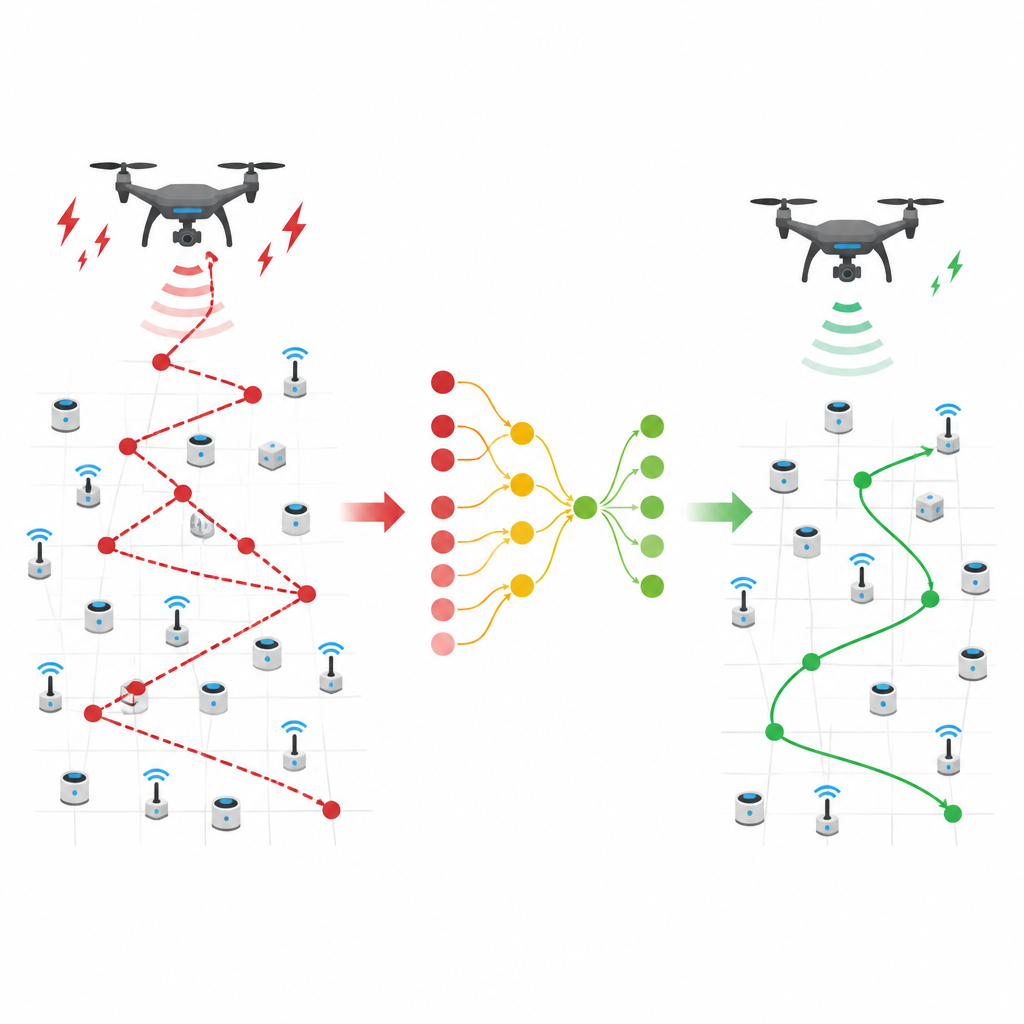
המחקר מתאר עתיד שבו כלי טיס ללא טייס, כלומר רחפנים, נושאים ציוד מחשוב קרוב למקום שבו מיוצרים הנתונים. במקום לשלוח מידע לשרתי ענן מרוחקים, רחפנים קרובים יכולים לקבל, לעבד ולהחזיר תוצאות במהירות — מושג הידוע כמיחשוב קצה נייד. בסידור זה, כל רחפן עוקב אחר מסלול המורכב ממספר נקודות השהייה שבהן הוא נעצר לתקשר עם מכשירי קרקע. האתגר הוא להחליט כמה נקודות כאלה נחוצות, היכן למקם אותן ובאיזה סדר לבקר בהן כדי שבעלי הרחפנים והמכשירים הקרקעיים יצרכו כמה שפחות אנרגיה, ועדיין יבצעו את כל המשימות בזמן.

להפוך את צמיחת הפטריות לכלי תכנון
כדי לפתור חידה זו, המחברים שואבים השראה מאופן שבו רשתות פטרייתיות מתרחבות באדמה בחיפוש אחר חומרים מזינים. סיבי הפטריה מתפצלים, נמנעים מאזורי עוני ומתרכזים סביב כתמים עשירים. האלגוריתם החדש, הקרוי FGODE, מחקה התנהגויות אלה כדי לחקור מסלולים רבים אפשריים לרחפנים. במקביל הוא מוסיף מרכיב שני הנלקח משיטה אבולוציונית ידועה בשם התפתחות דיפרנציאלית, שמתמחה בליטוש פתרונות מבטיחים. יחד, שתי הרעיונות מאזנים בין חקירה נרחבת לבין שיפור מדויק, ועוזרים לרחפנים להיחלץ ממסלולים גרועים ולהתייצב על מסלולים טובים יותר.
קידוד חכם יותר של נקודות עצירה לרחפן
תובנה מרכזית בעבודה היא האופן שבו מתארים מסלול אפשרי למחשב יכול להשפיע רבות על איכות התוכנית הסופית. במקום לכפות על כל פתרון ניסיוני לשאת רשימה ארוכה של נקודות עצירה פוטנציאליות, שרבות מהן לא ישמשו מעולם, המחברים משתמשים בייצוג קומפקטי שמאפשר למספר ולמיקום נקודות העצירה להשתנות באופן טבעי. פעולות פשוטות יכולות להכניס נקודה חדשה, להסיר נקודה מיותרת או להחליף בחירה חלשה במועמד טוב יותר. תחבולות נוספות, כגון כלל חמדנות המקשר בין נקודות לעצמים למסלולים קצרים ונגיעה של הפרעה אקראית, שומרות על גיוון החיפוש ועוזרות להימנע מהיתקעות בתבניות בינוניות.
מבחנים לשיטה
החוקרים בודקים את FGODE בסימולציות מחשב עם ארבעה רחפנים המשרתים בין 60 ל-200 מכשירים מפוזרים בשטח של קילומטר מרובע. הם משווים את שיטתם מול מספר טכניקות תכנון ואופטימיזציה עדכניות, כולל אלגוריתמים המושפעים מהטבע ועיצובים היברידיים. במגוון המקרים הללו, FGODE מוצא בעקביות מסלולים שמצמצמים את צריכת האנרגיה המשולבת של הרחפנים והמכשירים, וכן מציג תוצאות יציבות בין הרצות. בדיקות סטטיסטיות מאשרות שיתרונו אינו ככל הנראה מקרי. בנוסף, האלגוריתם מתכנס למסלולים טובים מהר יותר ממתחריו, כלומר הוא יכול לספק תוכניות חזקות במסגרת תקציב חישובי ריאלי.
מה משמעות הדבר למערכות מחוברות
לסיכום, הממצא העיקרי הוא שהמחקר מציע מתכון מעשי להנחיית ציי רחפנים כך שיפעלו כשולחי נתונים יעילים מעופפים. בעיצוב מושכל יותר של מסלולי הטיסה שלהם, המערכת מקטינה את עוצמת השידור שהמכשירים הקרקעיים נדרשים להשתמש בה ואת משך ההשהייה או הנסיעה של הרחפנים, ובכך מקטינה את צריכת האנרגיה משני הגורמים. אף שהעבודה הודגמה בסימולציות, היא מצביעה על רשתות חכמות וגמישות יותר שבהן שרתים ניידים מעופפים יוכלו לתמוך בחוות, ערים ואזורים חירום ללא צורך בחילופי סוללות תכופים או תשתית כבדה — מה שהופך מערכות מקושרות בקנה מידה גדול לברת קיימא יותר.
ציטוט: Othman, A.A., Elmanakhly, D.A. A hybrid fungal growth and differential evolution algorithm for energy-efficient UAV trajectory planning in MEC. Sci Rep 16, 16454 (2026). https://doi.org/10.1038/s41598-026-54288-4
מילות מפתח: תכנון מסלולי רחפן, מיחשוב קצה נייד, יעילות אנרגטית באינטרנט של הדברים, אופטימיזציה מטה-היוריסטית, איסוף נתונים באמצעות רחפנים