Clear Sky Science · ru
Гибридный алгоритм грибкового роста и дифференциальной эволюции для энергоэффективного планирования траектории БПЛА в MEC
Почему важны более разумные маршруты для дронов
Миллиарды крошечных устройств сейчас следят за посевами, отслеживают пульс и управляют светофорами, но у всех одна проблема: ограниченная батарея и скромные вычислительные возможности. В этой работе исследуется, как летающие помощники в виде дронов с небольшими центрами обработки данных могут перемещаться более хитро по воздуху, чтобы собирать и обрабатывать информацию от этих устройств, расходуя при этом меньше энергии. Черпая идеи из того, как грибы распространяются в почве, и сочетая их с подходами эволюционных вычислений, авторы создают метод планирования, позволяющий флотам дронов обслуживать множество устройств эффективно, не исчерпывая собственные аккумуляторы и батареи поддерживаемых гаджетов.
Летающие помощники для Интернета вещей
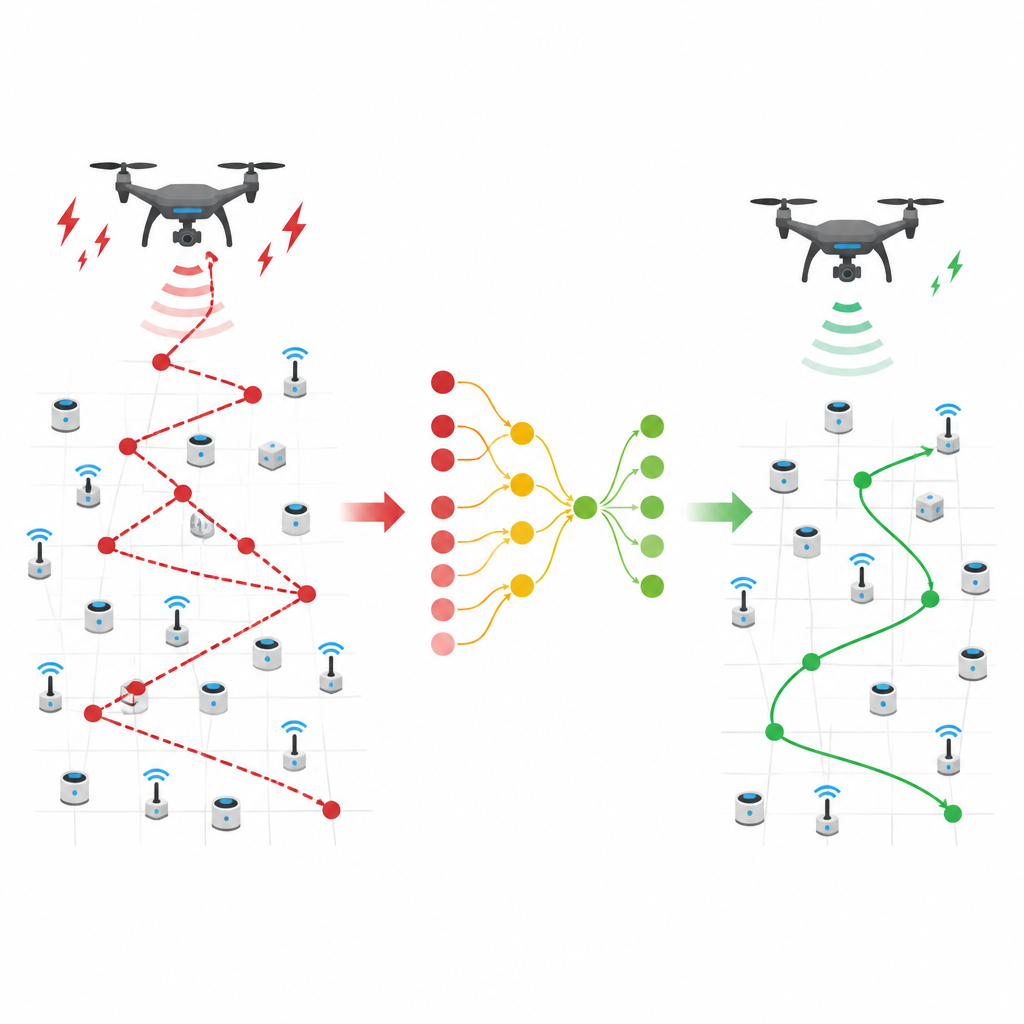
Исследование рассматривает будущее, в котором беспилотные летательные аппараты, или дроны, несут вычислительное оборудование близко к месту появления данных. Вместо пересылки информации на удалённые облачные серверы соседние дроны могут принимать, обрабатывать и возвращать результаты быстро — концепция, известная как мобильные периферийные вычисления. В такой схеме каждый дрон следует по маршруту, состоящему из нескольких точек зависания, где он останавливается для связи с наземными устройствами. Задача состоит в том, чтобы определить, сколько таких точек нужно, где их разместить и в каком порядке дрон должен их посещать, чтобы и дроны, и наземные устройства тратили как можно меньше энергии, при этом выполняя все задания вовремя.

Преобразование грибкового роста в инструмент планирования
Чтобы решить эту задачу, авторы черпают вдохновение из того, как грибные сети расширяются в почве в поисках питательных веществ. Грибные нити ветвятся, обходят бедные участки и концентрируются вокруг богатых пятен. Новый алгоритм, названный FGODE, имитирует эти поведения для исследования множества возможных маршрутов дронов. Одновременно он добавляет второй компонент из известного эволюционного метода — дифференциальной эволюции, который хорош в доработке перспективных решений. Вдвоём эти идеи сочетают широкое исследование и тщательную доводку, помогая дронам избегать плохих маршрутов и находить лучшие.
Более умная кодировка точек остановки дрона
Ключевое наблюдение работы в том, что то, как вы описываете возможный маршрут для компьютера, сильно влияет на качество итогового плана. Вместо того чтобы вынуждать каждое пробное решение нести длинный список потенциальных точек остановки, многие из которых никогда не будут использованы, авторы применяют компактное представление, позволяющее естественно изменять количество и расположение точек. Простые операции могут вставить новую точку, удалить лишнюю или заменить слабый вариант на лучший кандидат. Дополнительные приёмы, такие как жадное правило для склеивания точек в короткие пути и лёгкие случайные возмущения, поддерживают разнообразие поиска и помогают не застревать в посредственных схемах.
Тестирование метода
Исследователи проверяют FGODE в компьютерных симуляциях с четырьмя дронами, обслуживающими от 60 до 200 устройств, разбросанных по квадратному километру. Они сравнивают свой метод с несколькими недавно предложенными методиками планирования и оптимизации, включая как био-вдохновлённые алгоритмы, так и гибридные решения. В этих сценариях FGODE последовательно находит маршруты, сокращающие суммарное энергопотребление дронов и устройств, при этом показывая стабильные результаты от запуска к запуску. Статистические проверки подтверждают, что его преимущество вряд ли случайно. Кроме того, алгоритм сходится к хорошим маршрутам быстрее конкурентов, то есть способен выдать сильные планы в реалистичном вычислительном бюджете.
Что это означает для подключённых систем
Для читателя вывод прост: это исследование предлагает практичный рецепт для управления флотами дронов, чтобы они действовали как эффективные воздушные курьеры данных. Продуманная форма их полётов снижает, насколько громко наземным устройствам нужно «кричать», чтобы быть услышанными, и как долго дроны должны зависать или лететь, уменьшая энергозатраты с обеих сторон. Хотя работа продемонстрирована в симуляциях, она указывает путь к более умным и гибким сетям, где мобильные летающие серверы смогут поддерживать фермы, города и зоны чрезвычайных ситуаций без постоянной смены аккумуляторов или дорогой инфраструктуры, делая крупномасштабные подключённые системы более устойчивыми.
Цитирование: Othman, A.A., Elmanakhly, D.A. A hybrid fungal growth and differential evolution algorithm for energy-efficient UAV trajectory planning in MEC. Sci Rep 16, 16454 (2026). https://doi.org/10.1038/s41598-026-54288-4
Ключевые слова: планирование траектории БПЛА, мобильные периферийные вычисления, энергоэффективность IoT, метаэвристическая оптимизация, сбор данных дроном