Clear Sky Science · fr
Un algorithme hybride de croissance fongique et d’évolution différentielle pour la planification de trajectoires de UAV économe en énergie dans MEC
Pourquoi des trajets de drone plus intelligents comptent
Des milliards de petits appareils surveillent désormais les cultures, suivent les battements de cœur et gèrent les feux de circulation, mais ils partagent tous le même problème : une autonomie limitée et une puissance de calcul modeste. Cet article examine comment des assistants volants, sous la forme de drones équipés de petits centres de données, peuvent se déplacer plus astucieusement dans l’air pour collecter et traiter les informations issues de ces dispositifs tout en gaspillant moins d’énergie. En s’inspirant de la façon dont les champignons se propagent dans le sol et en combinant cela avec des idées de l’informatique évolutionnaire, les auteurs conçoivent une méthode de planification qui permet à des flottes de drones de desservir de nombreux appareils efficacement sans vider leurs propres batteries ni celles des appareils qu’ils soutiennent.
Des assistants volants pour l’Internet des objets
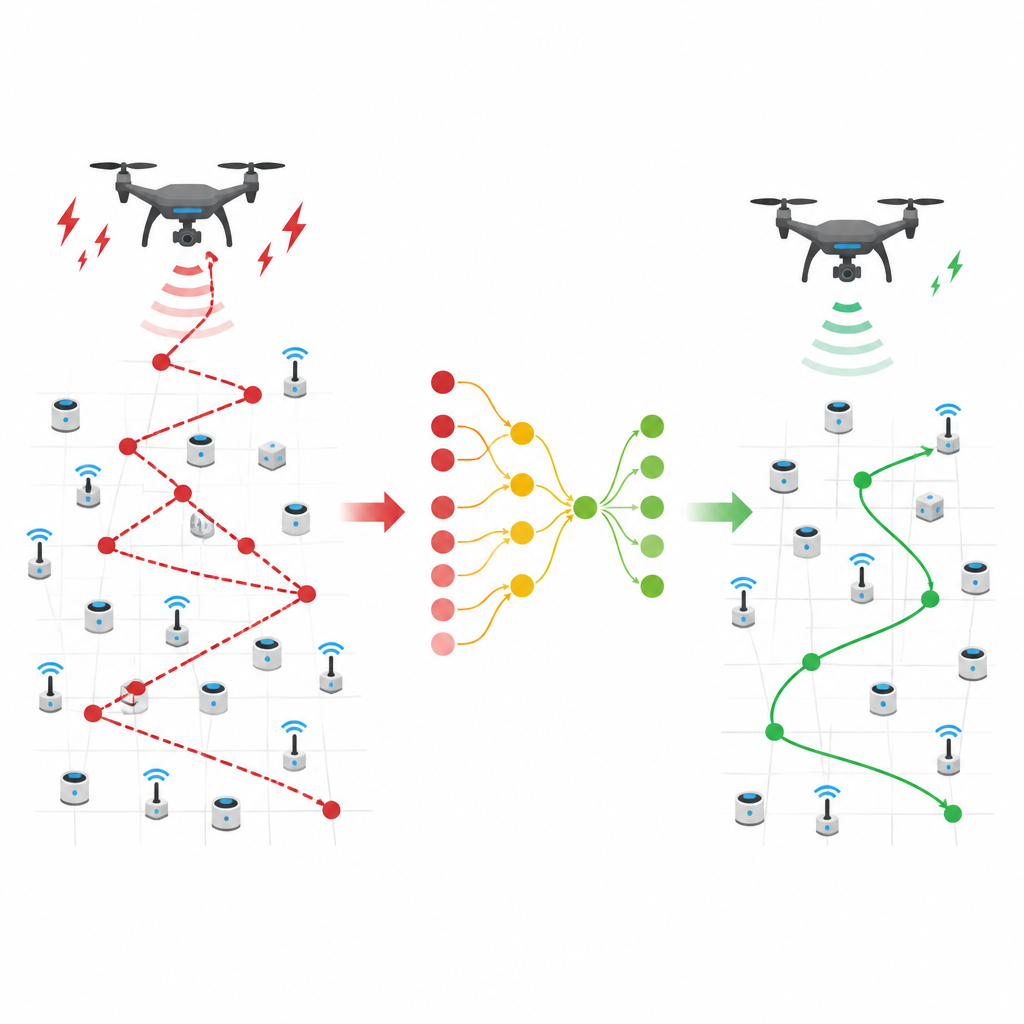
L’étude envisage un futur où des véhicules aériens sans pilote, ou drones, transportent du matériel de calcul à proximité des lieux de production des données. Plutôt que d’envoyer les informations vers des serveurs cloud lointains, des drones proches peuvent recevoir, traiter et renvoyer les résultats rapidement, un concept connu sous le nom de mobile edge computing. Dans ce schéma, chaque drone suit une trajectoire composée de plusieurs points d’hébergement où il s’arrête pour communiquer avec des dispositifs au sol. Le défi consiste à déterminer combien de ces points sont nécessaires, où les placer et dans quel ordre le drone doit les visiter afin que les drones et les dispositifs au sol utilisent le moins d’énergie possible, tout en traitant leurs tâches dans les délais.

Transformer la croissance fongique en outil de planification
Pour résoudre ce casse-tête, les auteurs s’inspirent de la manière dont les réseaux fongiques s’étendent dans le sol à la recherche de nutriments. Les filaments fongiques se ramifient, évitent les régions pauvres et se concentrent autour des zones riches. Le nouvel algorithme, appelé FGODE, imite ces comportements pour explorer de nombreuses routes possibles de drones. En parallèle, il ajoute un second ingrédient tiré d’une méthode évolutionnaire bien connue appelée évolution différentielle, qui est efficace pour affiner des solutions prometteuses. Ensemble, ces deux idées équilibrent une exploration large et une refinement soigné, aidant les drones à échapper aux mauvaises trajectoires et à converger vers de meilleures.
Un encodage plus intelligent des points d’arrêt des drones
Une idée clé du travail est que la façon de décrire une trajectoire possible à l’ordinateur peut grandement affecter la qualité du plan final. Plutôt que de forcer chaque solution testée à porter une longue liste de points d’arrêt potentiels, dont beaucoup ne seront jamais utilisés, les auteurs emploient une représentation compacte qui permet au nombre et au placement des points d’arrêt d’évoluer naturellement. Des opérations simples peuvent insérer un nouveau point, supprimer un point inutile ou remplacer un choix faible par un meilleur candidat. Des astuces supplémentaires, comme une règle gloutonne qui enchaîne les points d’arrêt en courts parcours et une touche de perturbation aléatoire, maintiennent la diversité de la recherche et aident à éviter de rester coincé dans des schémas médiocres.
Mettre la méthode à l’épreuve
Les chercheurs testent FGODE dans des simulations informatiques avec quatre drones desservant entre 60 et 200 dispositifs répartis sur un kilomètre carré. Ils comparent leur méthode à plusieurs techniques récentes de planification et d’optimisation, incluant des algorithmes inspirés de la nature et des conceptions hybrides. Dans tous les cas, FGODE trouve systématiquement des trajectoires qui réduisent la consommation énergétique combinée des drones et des appareils, tout en affichant des résultats stables d’une exécution à l’autre. Des vérifications statistiques confirment que son avantage est peu susceptible d’être dû au hasard. De plus, l’algorithme converge vers de bonnes trajectoires plus rapidement que ses concurrents, ce qui signifie qu’il peut fournir des plans performants dans un budget de calcul réaliste.
Ce que cela implique pour les systèmes connectés
Pour les lecteurs, la conclusion est que cette recherche propose une recette pratique pour guider des flottes de drones afin qu’ils fonctionnent comme des coursiers aériens efficaces pour les données. En façonnant leurs trajectoires de vol de manière plus réfléchie, le système réduit l’effort des dispositifs au sol pour se faire entendre et la durée pendant laquelle les drones doivent stationner ou voyager, diminuant ainsi la facture énergétique des deux côtés. Bien que le travail soit démontré en simulation, il ouvre la voie à des réseaux plus intelligents et plus flexibles où des serveurs volants mobiles peuvent soutenir des fermes, des villes et des zones d’urgence sans remplacements fréquents de batteries ni infrastructures lourdes, rendant les systèmes connectés à grande échelle plus durables.
Citation: Othman, A.A., Elmanakhly, D.A. A hybrid fungal growth and differential evolution algorithm for energy-efficient UAV trajectory planning in MEC. Sci Rep 16, 16454 (2026). https://doi.org/10.1038/s41598-026-54288-4
Mots-clés: planification de trajectoire UAV, edge computing mobile, efficacité énergétique IoT, optimisation métaheuristique, collecte de données par drone