Clear Sky Science · en
A hybrid fungal growth and differential evolution algorithm for energy-efficient UAV trajectory planning in MEC
Why smarter drone paths matter
Billions of tiny devices now watch crops, track heartbeats, and manage traffic lights, but they all share the same problem: limited battery power and modest computing strength. This paper explores how flying helpers, in the form of drones equipped with small data centers, can move more cleverly through the air to collect and process information from these devices while wasting less energy. By learning from the way fungi spread through soil and combining this with ideas from evolutionary computing, the authors design a planning method that lets fleets of drones serve many devices efficiently without draining their own batteries or those of the gadgets they support.
Flying helpers for the Internet of Things
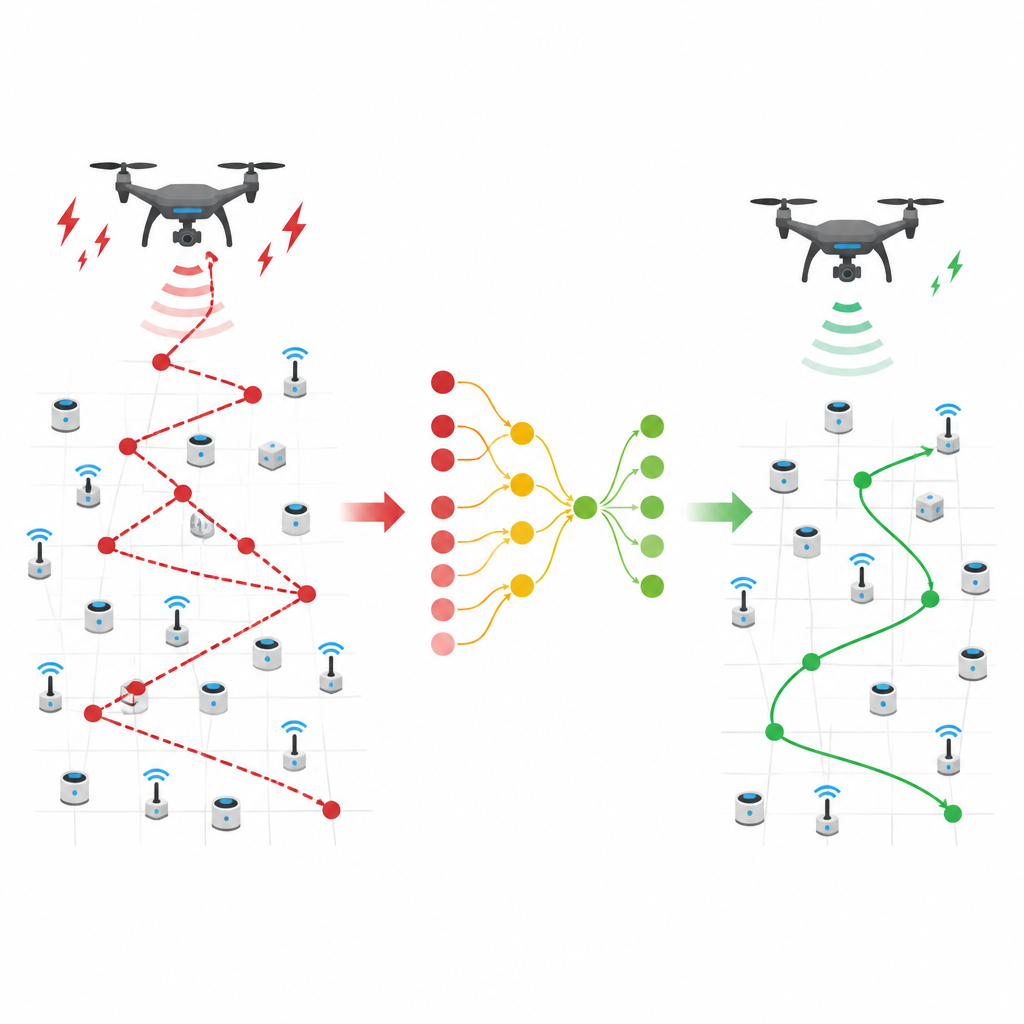
The study looks at a future where unmanned aerial vehicles, or drones, carry computing equipment close to where data is produced. Instead of sending information to faraway cloud servers, nearby drones can receive, process, and return results quickly, a concept known as mobile edge computing. In this setup, each drone follows a route made of several hovering points where it pauses to communicate with ground devices. The challenge is to decide how many of these points are needed, where to place them, and in what order the drone should visit them so that both the drones and the ground devices use as little energy as possible, while still handling all their tasks on time.

Turning fungal growth into a planning tool
To solve this puzzle, the authors borrow inspiration from the way fungal networks expand through soil in search of nutrients. Fungal threads branch, avoid poor regions, and concentrate around rich patches. The new algorithm, called FGODE, mimics these behaviors to explore many possible drone routes. At the same time, it adds a second ingredient taken from a well-known evolutionary method called differential evolution, which is good at polishing promising solutions. Together, these two ideas balance wild exploration with careful refinement, helping the drones escape bad routes and settle on better ones.
Smarter encoding of drone stop points
A key insight of the work is that how you describe a possible route to the computer can greatly affect the quality of the final plan. Rather than forcing every trial solution to carry a long list of potential stopping spots, many of which will never be used, the authors use a compact representation that lets the number and placement of stop points change naturally. Simple operations can insert a new point, remove an unnecessary one, or replace a weak choice with a better candidate. Extra tricks, such as a greedy rule that strings stop points together into short paths and a touch of random disturbance, keep the search varied and help avoid getting stuck in so-so patterns.
Putting the method to the test
The researchers test FGODE in computer simulations with four drones serving between 60 and 200 devices scattered over a square kilometer. They compare their method against several recent planning and optimization techniques, including both nature-inspired algorithms and hybrid designs. Across these cases, FGODE consistently finds routes that cut combined energy use of drones and devices, while also showing stable results from run to run. Statistical checks confirm that its advantage is unlikely to be due to chance. In addition, the algorithm converges to good routes faster than its competitors, meaning it can deliver strong plans within a realistic computing budget.
What this means for connected systems
For readers, the bottom line is that this research offers a practical recipe for guiding fleets of drones so they act like efficient airborne couriers for data. By shaping their flight paths more thoughtfully, the system reduces how hard ground devices must shout to be heard and how long drones must hover or travel, trimming energy bills on both sides. While the work is demonstrated in simulations, it points toward smarter, more flexible networks where mobile flying servers can support farms, cities, and emergency zones without constant battery swaps or heavy infrastructure, making large-scale connected systems more sustainable.
Citation: Othman, A.A., Elmanakhly, D.A. A hybrid fungal growth and differential evolution algorithm for energy-efficient UAV trajectory planning in MEC. Sci Rep 16, 16454 (2026). https://doi.org/10.1038/s41598-026-54288-4
Keywords: UAV trajectory planning, mobile edge computing, IoT energy efficiency, metaheuristic optimization, drone data collection