Clear Sky Science · ja
MECにおける省エネルギーUAV軌道計画のためのハイブリッド真菌成長と差分進化アルゴリズム
なぜドローンの経路を賢くすることが重要か
数十億の小型デバイスが作物の監視、心拍の追跡、信号機の管理などを行っているが、共通の課題はバッテリー容量の制約と限られた計算能力だ。本論文は、小型のデータセンターを備えたドローンという形の飛行支援機が、これらデバイスから情報を収集・処理する際にエネルギーの無駄を減らすために、より賢く空中を移動する方法を探る。土壌中で真菌が広がる様子に学び、進化計算の考えを組み合わせることで、著者らは艦隊のドローンが自身や支援対象のバッテリーを過度に消耗することなく多くのデバイスに効率的に対応できる計画手法を設計した。
モノのインターネットのための飛行する支援機
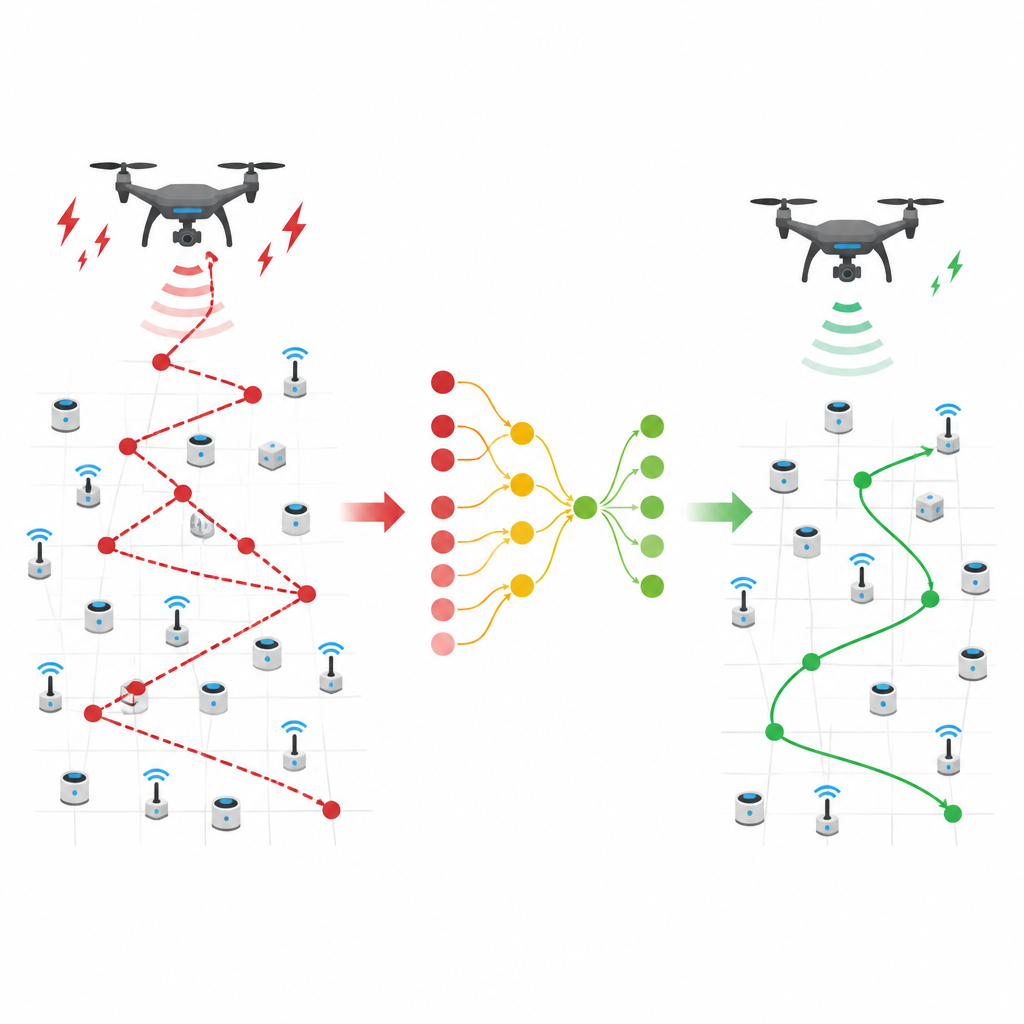
本研究は、無人航空機(ドローン)がデータが生成される現場の近くに計算機器を運ぶ未来を想定している。遠方のクラウドサーバに情報を送る代わりに、近隣のドローンが受信、処理、結果返却を迅速に行う――これがモバイルエッジコンピューティングの概念だ。この仕組みでは、各ドローンは地上デバイスと通信するために停止する複数のホバリング地点からなるルートに従う。課題は、これらの地点を何個用意すべきか、どこに配置すべきか、どの順序で訪れるべきかを決めて、ドローンと地上デバイスの双方が可能な限り少ないエネルギーで任務を時間内にこなせるようにすることだ。

真菌の成長を計画ツールに変える
この問題を解くために、著者らは栄養を求めて土壌中に広がる真菌ネットワークの振る舞いから着想を得た。真菌の糸は分岐し、不利な領域を避け、豊かな斑点の周りに集まる。新しいアルゴリズムFGODEはこれらの挙動を模倣して多くのドローン経路候補を探索する。同時に、有望な解を磨くのに適した差分進化というよく知られた進化的手法からの要素を加える。これら二つの考えを組み合わせることで、荒々しい探索と慎重な精緻化のバランスが取れ、ドローンが悪い経路から脱出しより良い経路に収束しやすくなる。
ドローンの停止点を賢く符号化する
本研究の重要な洞察は、コンピュータに可能な経路をどのように表現するかが最終計画の品質に大きく影響するという点だ。多くの試行解に長い潜在的停止点のリストを無理に持たせ、多くは使われないままにするのではなく、著者らは停止点の数と配置が自然に変化するコンパクトな表現を採用した。単純な操作で新しい点を挿入したり、不要な点を削除したり、弱い選択をより良い候補に置き換えたりできる。停止点を短い経路にまとめる貪欲ルールや若干のランダムな摂動といった工夫により探索の多様性が保たれ、凡庸なパターンに陥るのを防ぐ。
手法の検証
研究者らは、1平方キロメートルに散在する60〜200台のデバイスに対して4機のドローンがサービスを提供するシミュレーションでFGODEを検証した。彼らは自然発想アルゴリズムやハイブリッド設計を含む複数の最近の計画・最適化手法と比較した。これらの事例において、FGODEはドローンとデバイスの合計エネルギー消費を削減する経路を一貫して見つけ、かつ実行間の結果が安定している。統計的検定によりその優位性が偶然によるものではないことが確認された。さらに、アルゴリズムは競合手法よりも速く良好な経路へ収束し、現実的な計算予算内で強力な計画を提供できることが示された。
接続されたシステムへの意味
読者にとっての結論は、本研究がドローン艦隊を効率的な空中データ伝達者として導く実用的な手法を示していることだ。飛行経路をより慎重に設計することで、地上デバイスが通信を確実に届けるために発する負荷や、ドローンがホバリングや移動に要する時間を減らし、双方のエネルギー消費を削減する。研究はシミュレーションで示されているが、頻繁なバッテリー交換や大規模なインフラに頼らずに農場、都市、緊急現場を支援できる、より賢明で柔軟なネットワークへの道を示しており、大規模な接続システムの持続可能性向上につながる可能性がある。
引用: Othman, A.A., Elmanakhly, D.A. A hybrid fungal growth and differential evolution algorithm for energy-efficient UAV trajectory planning in MEC. Sci Rep 16, 16454 (2026). https://doi.org/10.1038/s41598-026-54288-4
キーワード: UAV軌道計画, モバイルエッジコンピューティング, IoTエネルギー効率, メタヒューリスティック最適化, ドローンによるデータ収集