Clear Sky Science · nl
Een hybride schimmelgroei- en differentiële-evolutiealgoritme voor energiezuinige UAV-trajectplanning in MEC
Waarom slimere drone-routes ertoe doen
Miljarden kleine apparaten bewaken nu gewassen, volgen hartslagen en regelen verkeerslichten, maar ze hebben één gemeenschappelijk probleem: beperkte batterijduur en bescheiden rekencapaciteit. Dit artikel onderzoekt hoe vliegende helpers in de vorm van drones met kleine datacenters zich slimmer door de lucht kunnen verplaatsen om informatie van deze apparaten te verzamelen en te verwerken met minder energieverlies. Door te leren van de manier waarop schimmels zich door de bodem verspreiden en dit te combineren met ideeën uit evolutionaire berekening, ontwerpen de auteurs een planningsmethode waarmee vloten drones veel apparaten efficiënt kunnen bedienen zonder hun eigen batterijen of die van de ondersteunde apparaten snel leeg te trekken.
Vliegende helpers voor het Internet of Things
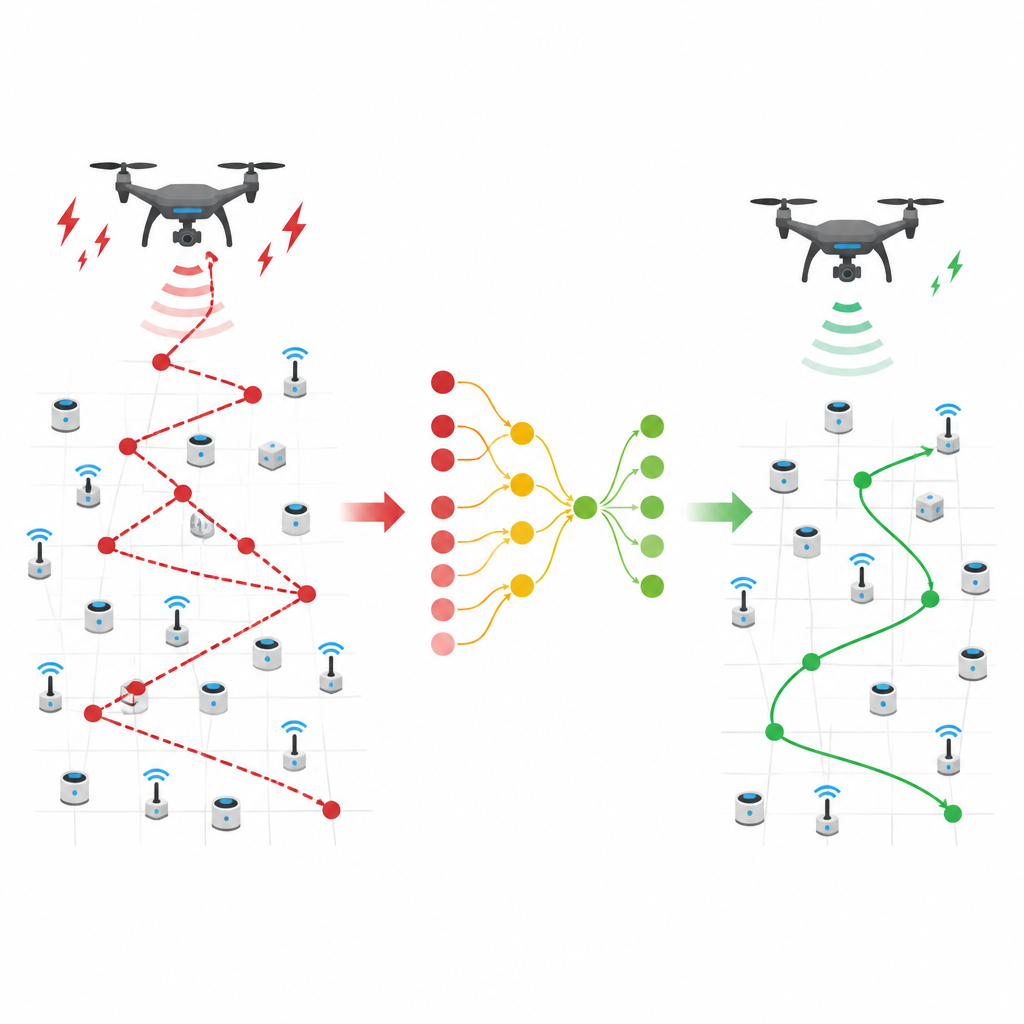
De studie kijkt naar een toekomst waarin onbemande luchtvaartuigen, of drones, rekenapparatuur dicht bij de plaats waar gegevens ontstaan meenemen. In plaats van informatie naar verre cloudservers te sturen, kunnen nabijgelegen drones gegevens snel ontvangen, verwerken en resultaten teruggeven — een concept dat bekendstaat als mobile edge computing. In deze opzet volgt elke drone een route die uit meerdere zweefpunten bestaat waar hij stopt om met grondapparaten te communiceren. De uitdaging is te bepalen hoeveel van deze punten nodig zijn, waar ze moeten komen en in welke volgorde de drone ze moet bezoeken, zodat zowel de drones als de grondapparaten zo min mogelijk energie gebruiken en toch alle taken op tijd worden afgehandeld.

Schimmelgroei inzetten als planningsinstrument
Om dit probleem op te lossen, laten de auteurs zich inspireren door de manier waarop schimmelnetswerken zich door de bodem uitbreiden op zoek naar voedingsstoffen. Schimmeldraden vertakken, mijden arme gebieden en concentreren zich rond rijke plekken. Het nieuwe algoritme, FGODE genoemd, bootst dit gedrag na om veel mogelijke droneroutes te verkennen. Tegelijk voegt het een tweede ingrediënt toe uit een bekend evolutionair werkwijze genaamd differentiële evolutie, die goed is in het verfijnen van veelbelovende oplossingen. Samen balanceren deze twee ideeën wild verkennen met zorgvuldige verfijning, waardoor drones slechte routes kunnen vermijden en op betere oplossingen uitkomen.
Slimmere codering van drone-stopplaatsen
Een belangrijk inzicht van het werk is dat de manier waarop je een mogelijke route aan de computer beschrijft sterk van invloed kan zijn op de kwaliteit van het uiteindelijke plan. In plaats van elke proefoplossing te dwingen een lange lijst met potentiële stopplaatsen mee te dragen — waarvan er veel nooit gebruikt zullen worden — gebruiken de auteurs een compacte representatie die het aantal en de plaatsing van stopplaatsen natuurlijk laat variëren. Eenvoudige bewerkingen kunnen een nieuw punt invoegen, een overbodig punt verwijderen of een zwakke keuze vervangen door een betere kandidaat. Extra trucs, zoals een hebzuchtige regel die stopplaatsen aaneenschakelt tot korte paden en een vleugje willekeurige verstoring, houden de zoektocht gevarieerd en helpen te voorkomen dat het algoritme vastloopt in middelmatige patronen.
De methode op de proef gesteld
De onderzoekers testen FGODE in computersimulaties met vier drones die tussen de 60 en 200 apparaten bedienen verspreid over een vierkante kilometer. Ze vergelijken hun methode met verschillende recente plannings- en optimalisatietechnieken, waaronder natuurgeïnspireerde algoritmen en hybride ontwerpen. In al deze gevallen vindt FGODE consequent routes die het gecombineerde energieverbruik van drones en apparaten verlagen, terwijl het ook stabiele resultaten per run laat zien. Statistische toetsen bevestigen dat het voordeel waarschijnlijk niet door toeval verklaard kan worden. Bovendien convergeert het algoritme sneller naar goede routes dan zijn concurrenten, wat betekent dat het sterke plannen kan leveren binnen een realistisch rekenbudget.
Wat dit betekent voor verbonden systemen
Voor lezers is de kern dat dit onderzoek een praktisch recept biedt om vloten drones te sturen zodat ze als efficiënte luchtposters voor data functioneren. Door hun vliegroutes doordachter vorm te geven, vermindert het systeem hoe hard grondapparaten moeten uitzenden en hoe lang drones moeten hoveren of reizen, waardoor het energieverbruik aan beide kanten daalt. Hoewel de studie in simulaties is aangetoond, wijst het op slimmere, flexibelere netwerken waarin mobiele vliegende servers boerderijen, steden en noodzones kunnen ondersteunen zonder constante batterijwissels of zware infrastructuur, en zo grootschalige verbonden systemen duurzamer maken.
Bronvermelding: Othman, A.A., Elmanakhly, D.A. A hybrid fungal growth and differential evolution algorithm for energy-efficient UAV trajectory planning in MEC. Sci Rep 16, 16454 (2026). https://doi.org/10.1038/s41598-026-54288-4
Trefwoorden: UAV-trajectplanning, mobile edge computing, IoT-energie-efficiëntie, metaheuristische optimalisatie, drone-gegevensverzameling