Clear Sky Science · de
Ein hybrider Pilzwachstums- und Differentialevolutionsalgorithmus zur energieeffizienten Flugtrajektorienplanung von UAVs in MEC
Warum schlauere Drohnenrouten wichtig sind
Milliarden winziger Geräte überwachen inzwischen Felder, verfolgen Herzschläge und steuern Ampeln – sie haben aber alle dasselbe Problem: begrenzte Batteriekapazität und geringe Rechenleistung. Dieses Papier untersucht, wie fliegende Helfer in Form von Drohnen mit kleinen Rechenzentren sich intelligenter durch die Luft bewegen können, um Informationen von diesen Geräten zu sammeln und zu verarbeiten und dabei weniger Energie zu verschwenden. Indem die Autoren sich an der Ausbreitung von Pilzen im Boden orientieren und diese Idee mit Konzepten aus der evolutionären Informatik kombinieren, entwerfen sie eine Planungsmethode, die Flotten von Drohnen erlaubt, viele Geräte effizient zu versorgen, ohne die eigenen Batterien oder die der unterstützten Geräte zu leeren.
Fliegende Helfer für das Internet der Dinge
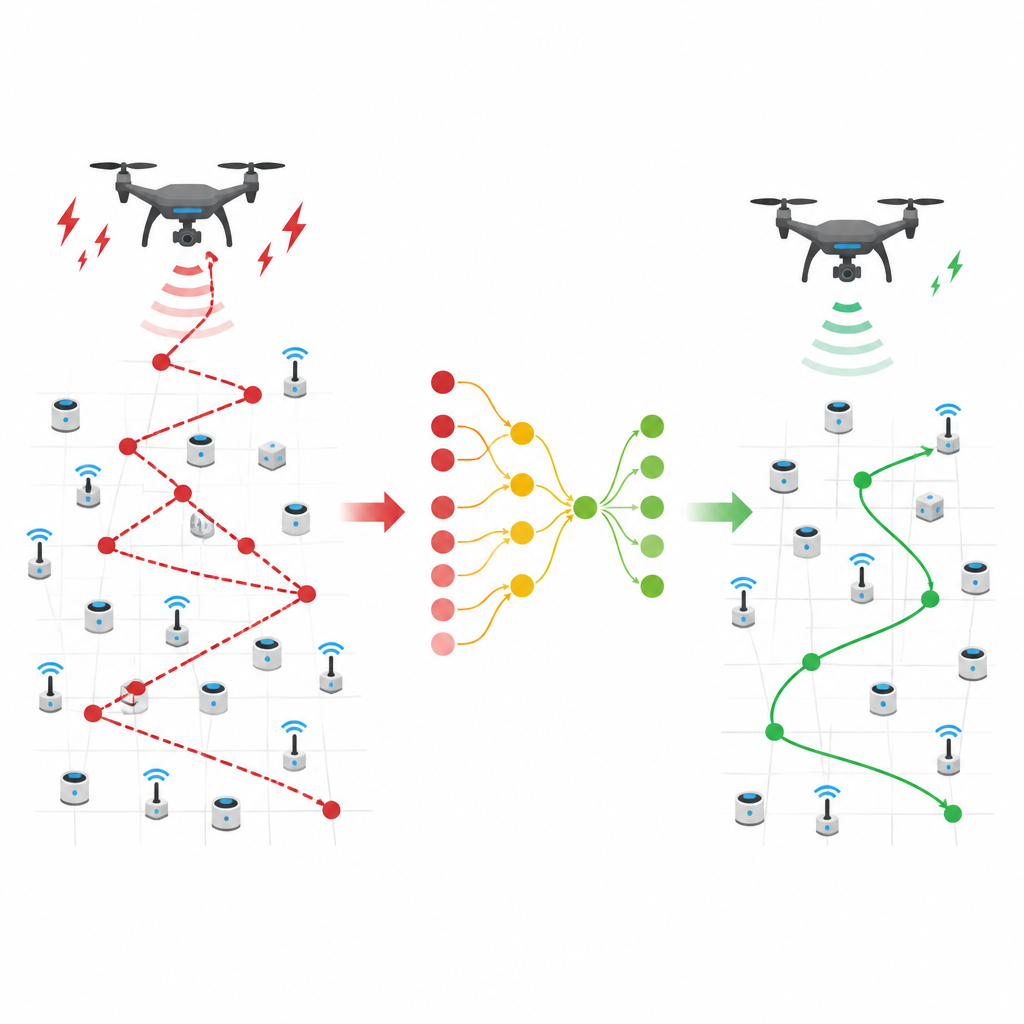
Die Studie betrachtet eine Zukunft, in der unbemannte Luftfahrzeuge, also Drohnen, Rechenausrüstung dorthin bringen, wo Daten entstehen. Anstatt Informationen zu weit entfernten Cloud‑Servern zu senden, können nahe Drohnen Daten empfangen, verarbeiten und Ergebnisse schnell zurückliefern – ein Konzept, das als Mobile Edge Computing bekannt ist. In diesem Aufbau folgt jede Drohne einer Route, die aus mehreren Schwebepunkten besteht, an denen sie anhält, um mit bodengestützten Geräten zu kommunizieren. Die Herausforderung besteht darin zu entscheiden, wie viele dieser Punkte benötigt werden, wo sie liegen und in welcher Reihenfolge die Drohne sie besuchen sollte, damit sowohl die Drohnen als auch die Endgeräte möglichst wenig Energie verbrauchen und gleichzeitig alle Aufgaben rechtzeitig erledigt werden.

Pilzwachstum als Planungswerkzeug
Um dieses Problem zu lösen, lassen sich die Autoren von der Art und Weise inspirieren, wie Pilznetzwerke sich im Boden ausbreiten, um Nährstoffe zu finden. Pilzfäden verzweigen, meiden schlechte Regionen und konzentrieren sich um nährstoffreiche Stellen. Der neue Algorithmus, genannt FGODE, imitiert dieses Verhalten, um zahlreiche mögliche Drohnenrouten zu erkunden. Gleichzeitig fügt er eine zweite Komponente aus einer bekannten evolutionären Methode, der differentiellen Evolution, hinzu, die gut darin ist, vielversprechende Lösungen zu verfeinern. Zusammen bringen diese beiden Ideen wildes Erkunden und sorgfältige Verfeinerung ins Gleichgewicht, sodass die Drohnen schlechten Routen entkommen und bessere Lösungen finden können.
Schlaueres Kodieren von Drohnenhaltepunkten
Eine zentrale Erkenntnis der Arbeit ist, dass die Art, wie eine mögliche Route dem Computer beschrieben wird, die Qualität des Endplans stark beeinflussen kann. Anstatt jede Versuchsvariante mit einer langen Liste potentieller Haltepunkte zu versehen, von denen viele nie gebraucht werden, verwenden die Autoren eine kompakte Darstellung, die Anzahl und Lage der Haltepunkte natürlich variieren lässt. Einfache Operationen können einen neuen Punkt einfügen, einen unnötigen entfernen oder eine schwache Wahl durch einen besseren Kandidaten ersetzen. Zusätzliche Tricks, etwa eine gierige Regel, die Haltepunkte zu kurzen Pfaden verkettet, und ein Hauch zufälliger Störung, halten die Suche vielfältig und helfen, im Suchen nicht in mittelmäßigen Mustern stecken zu bleiben.
Methodenprüfung
Die Forscher testen FGODE in Computersimulationen mit vier Drohnen, die zwischen 60 und 200 Geräte über ein Quadratkilometer versorgen. Sie vergleichen ihre Methode mit mehreren aktuellen Planungs‑ und Optimierungstechniken, darunter naturinspirierte Algorithmen und hybride Entwürfe. In all diesen Fällen findet FGODE konsistent Routen, die den kombinierten Energieverbrauch von Drohnen und Endgeräten reduzieren, und liefert dabei außerdem stabile Ergebnisse von Lauf zu Lauf. Statistische Tests bestätigen, dass sein Vorteil kaum auf Zufall beruht. Darüber hinaus konvergiert der Algorithmus schneller zu guten Routen als seine Wettbewerber, was bedeutet, dass er starke Pläne innerhalb realistischer Rechenbudgets liefern kann.
Was das für vernetzte Systeme bedeutet
Für die Leserschaft ist die Quintessenz, dass diese Forschung ein praktisches Rezept bietet, um Drohnenflotten so zu lenken, dass sie als effiziente luftgestützte Kuriere für Daten fungieren. Indem ihre Flugbahnen durchdachter gestaltet werden, verringert das System, wie laut die bodengestützten Geräte senden müssen, und wie lange Drohnen schweben oder reisen müssen, wodurch die Energiekosten auf beiden Seiten sinken. Auch wenn die Arbeit in Simulationen demonstriert wurde, weist sie auf intelligentere, flexiblere Netze hin, in denen mobile fliegende Server Höfe, Städte und Einsatzgebiete unterstützen können, ohne ständige Batteriewechsel oder schwere Infrastruktur – und macht großflächige vernetzte Systeme nachhaltiger.
Zitation: Othman, A.A., Elmanakhly, D.A. A hybrid fungal growth and differential evolution algorithm for energy-efficient UAV trajectory planning in MEC. Sci Rep 16, 16454 (2026). https://doi.org/10.1038/s41598-026-54288-4
Schlüsselwörter: UAV Trajektorienplanung, Mobile Edge Computing, IoT Energieeffizienz, Metaheuristische Optimierung, Drohnen Datensammlung