Clear Sky Science · sv
En hybridalgoritm baserad på svampväxt och differential evolution för energieffektiv UAV-ruttplanering i MEC
Varför smartare dronrutter spelar roll
Miljarder små enheter övervakar nu grödor, följer hjärtfrekvenser och styr trafikljus, men de har alla samma utmaning: begränsad batteritid och måttlig beräkningskapacitet. Den här artikeln undersöker hur flygande hjälpmedel, i form av droner utrustade med små datacenter, kan röra sig smartare för att samla in och bearbeta information från dessa enheter samtidigt som energislöseri minskas. Genom att hämta inspiration från hur svampar sprider sig i marken och kombinera detta med idéer från evolutionär databehandling, utformar författarna en planeringsmetod som gör att flottor av droner kan betjäna många enheter effektivt utan att tömma varken sina egna batterier eller de enheter de stödjer.
Flygande hjälpare för Sakernas Internet
Studien ser på en framtid där obemannade luftfarkoster, eller droner, bär beräkningsutrustning nära den plats där data genereras. Istället för att skicka information till avlägsna molnservrar kan närliggande droner ta emot, bearbeta och returnera resultat snabbt, ett koncept känt som mobil edge computing. I detta upplägg följer varje dron en rutt bestående av flera hovringspunkter där den stannar för att kommunicera med enheter på marken. Utmaningen är att bestämma hur många av dessa punkter som behövs, var de ska placeras och i vilken ordning dronen ska besöka dem så att både dronerna och markenheterna använder så lite energi som möjligt, samtidigt som alla uppgifter hanteras i tid.

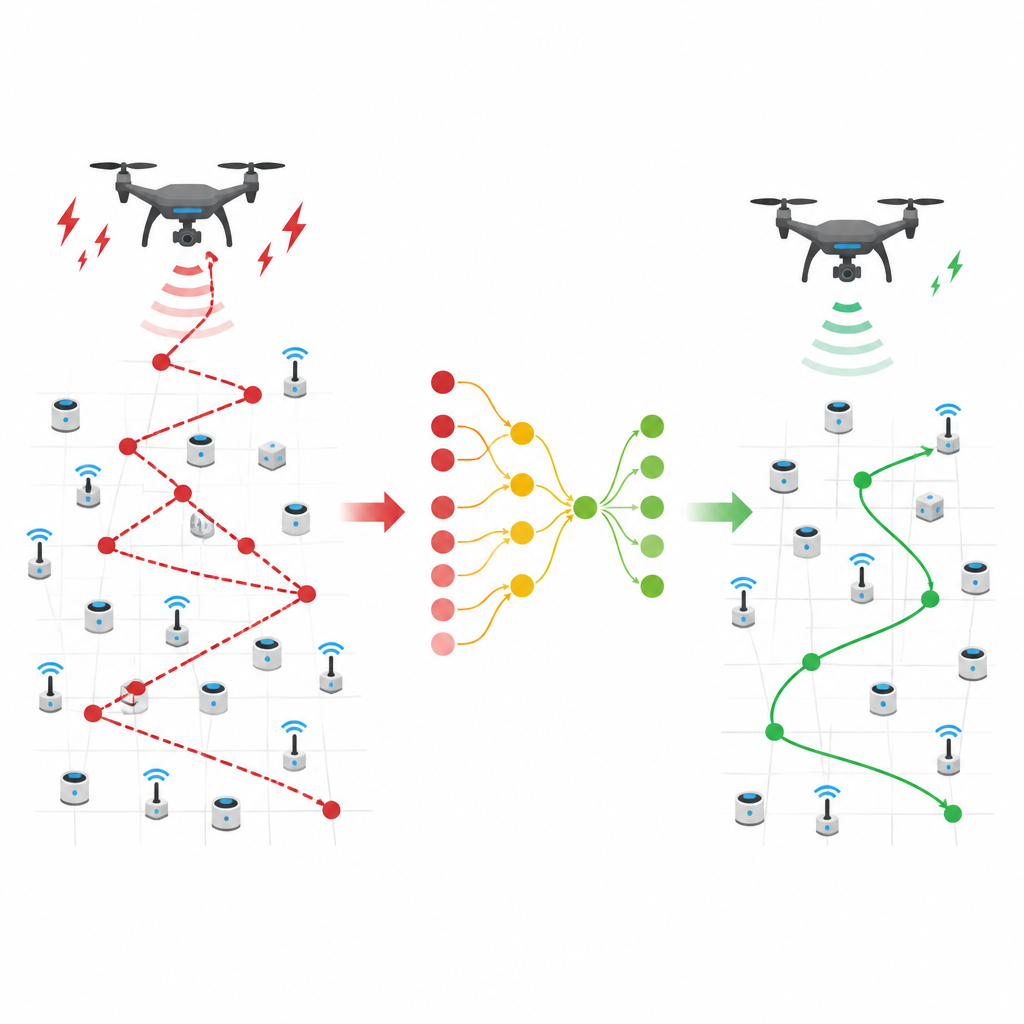
Att förvandla svampväxt till ett planeringsverktyg
För att lösa detta pussel hämtar författarna inspiration från hur svampnätverk expanderar genom jorden på jakt efter näring. Svamptrådar förgrenar sig, undviker dåliga områden och koncentreras kring rika fläckar. Den nya algoritmen, kallad FGODE, efterliknar dessa beteenden för att utforska många möjliga dronrutter. Samtidigt tillsätts en andra ingrediens hämtad från en välkänd evolutionär metod kallad differential evolution, som är bra på att finslipa lovande lösningar. Tillsammans balanserar dessa två idéer vild utforskning med noggrann förfining, vilket hjälper dronerna att undvika dåliga rutter och landa i bättre lösningar.
Smarte kodning av dronens stoppunkter
Ett centralt insiktsfullt drag i arbetet är att sättet man beskriver en möjlig rutt för datorn kan påverka kvaliteten på den slutliga planen avsevärt. Istället för att tvinga varje provlösning att bära en lång lista av potentiella stoppunkter, varav många aldrig kommer att användas, använder författarna en kompakt representation som låter antal och placering av stoppunkter förändras naturligt. Enkla operationer kan infoga en ny punkt, ta bort en onödig eller ersätta ett svagt val med en bättre kandidat. Ytterligare knep, som en girig regel som länkar stoppunkter till kortare stigar och en dos slumpmässig störning, håller sökningen varierad och hjälper till att undvika att fastna i mediokra mönster.
Sätta metoden på prov
Forskarna testar FGODE i datorsimuleringar med fyra droner som betjänar mellan 60 och 200 enheter utspridda över en kvadratkilometer. De jämför sin metod mot flera nyligen publicerade planerings- och optimeringstekniker, inklusive både naturinspirerade algoritmer och hybriddesigner. I dessa scenarier hittar FGODE konsekvent rutter som minskar den samlade energiförbrukningen för droner och enheter, samtidigt som den visar stabila resultat mellan körningarna. Statistiska test bekräftar att fördelen sannolikt inte beror på slumpen. Dessutom konvergerar algoritmen till bra rutter snabbare än konkurrenterna, vilket innebär att den kan leverera starka planer inom en realistisk beräkningsbudget.
Vad detta betyder för sammankopplade system
För läsaren är slutsatsen att denna forskning erbjuder ett praktiskt recept för att styra flottor av droner så att de fungerar som energieffektiva luftburna bud för data. Genom att utforma deras flygvägar mer omsorgsfullt minskar systemet hur hårt markenheterna måste ”ropa” för att höras och hur länge droner måste hovra eller resa, vilket skär ner energikostnader på båda sidor. Även om arbetet demonstrerats i simuleringar pekar det mot smartare, mer flexibla nätverk där mobila flygande servrar kan stödja jordbruk, städer och katastrofområden utan ständiga batteribyten eller tung infrastruktur, och göra storskaliga sammankopplade system mer hållbara.
Citering: Othman, A.A., Elmanakhly, D.A. A hybrid fungal growth and differential evolution algorithm for energy-efficient UAV trajectory planning in MEC. Sci Rep 16, 16454 (2026). https://doi.org/10.1038/s41598-026-54288-4
Nyckelord: UAV-ruttplanering, mobil edge computing, IoT energieffektivitet, metaheuristisk optimering, drone datainsamling