Clear Sky Science · zh
调节反射使模拟的人体行走与奔跑能够控制速度
这对我们如何移动有何意义
日常生活充满了速度平滑变化的情形:悠闲散步、加快脚步赶公交、慢慢进入慢跑或突然冲刺。我们很少考虑神经系统如何在不让我们绊倒的情况下管理这些转换。本研究利用对人体和脊髓的详尽计算机模拟,提出一个简单但深刻的问题:脊髓中的快速、自动反馈环路——我们的反射——本身是否就能处理大部分速度控制,甚至帮助在步行与奔跑之间切换?
窥视身体的“自动驾驶”系统
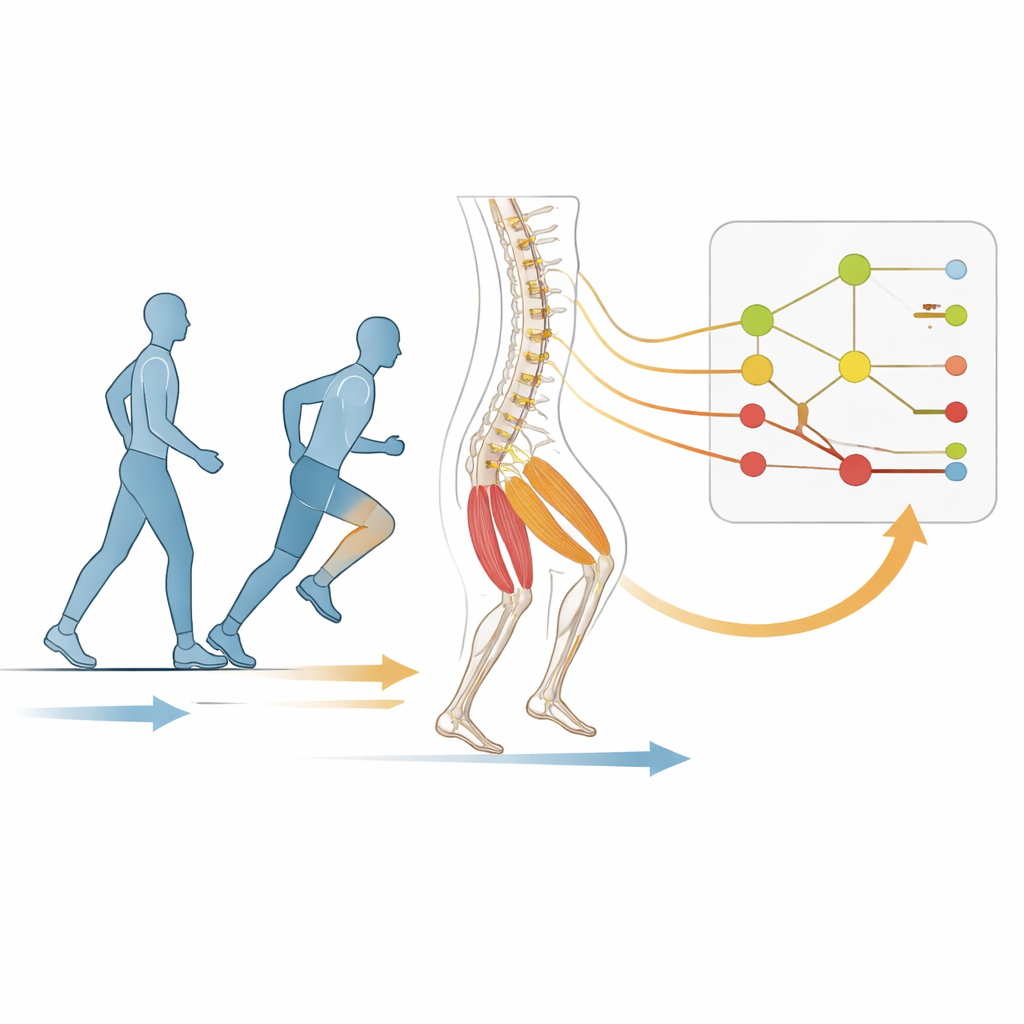
当我们行走或奔跑时,大脑并不会微观管理每一块肌肉。相反,脊髓包含的回路会基于来自肌肉与肌腱的信号自动调整肌肉活动。这些反射对肌肉的长度和受力做出反应,帮助我们保持直立与运动。另一类称为中枢模式发生器的回路可以自发地产生节律活动,而更高层的大脑则负责规划与精细调节。由于这些系统在真实个体中紧密交织,在实验室中几乎无法孤立地测试反射。作者转而采用一个神经肌肉骨骼的计算模型:一个基于物理的虚拟人体,具有骨骼、关节和每侧九块主要腿部肌肉,全部仅由类似反射的肌肉对之间的反馈驱动。
检验反射单独能做什么
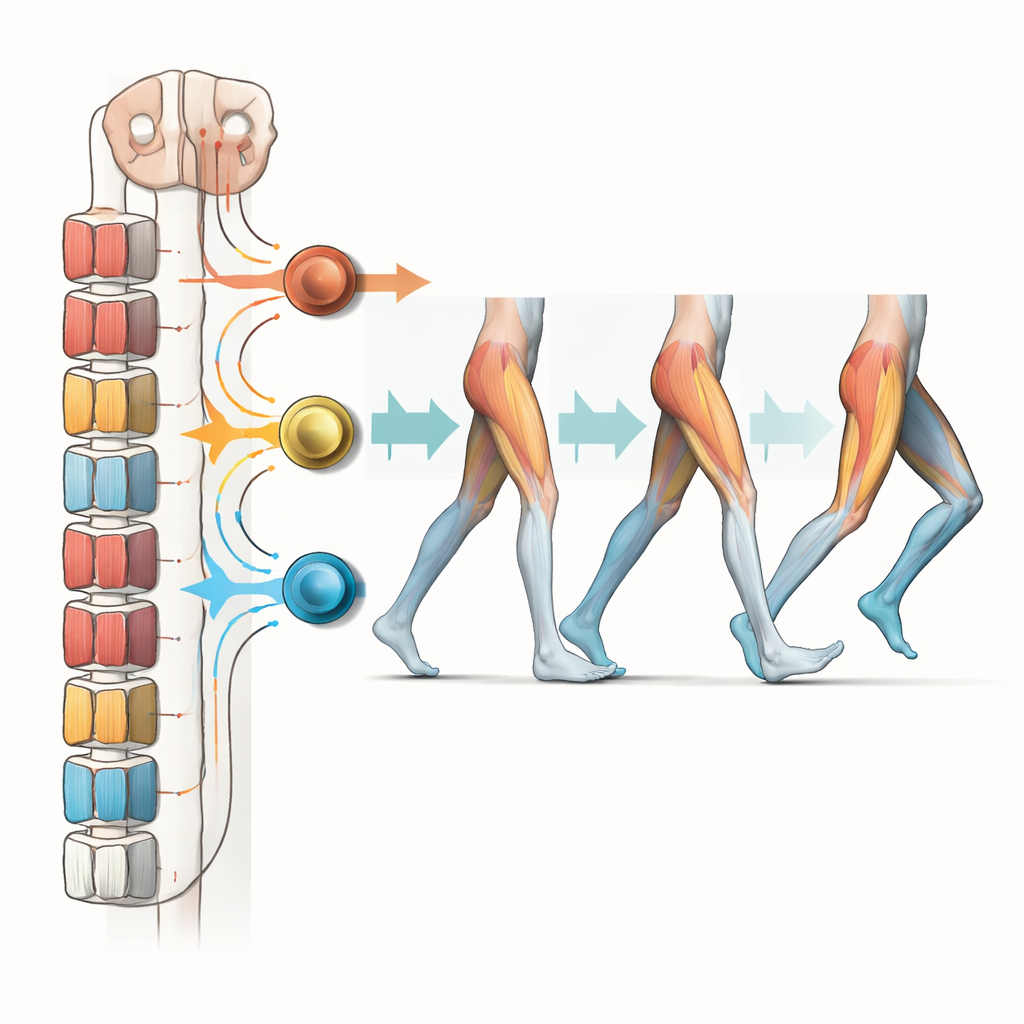
在模型中,每条反射通路接收肌肉长度或力的信号,并向同一肌肉或对抗肌发出兴奋性或抑制性信号,信号由增益放大并由偏移调整。总共有71个这样的可调参数。研究小组首先搜索这些参数组合,寻找可在非常慢与非常快速度下产生稳定步行与奔跑的解。他们发现,仅通过改变这些反射的增益与偏移,模型就能稳定步行,速度约为0.45 m/s到1.93 m/s;并能奔跑,速度为2.0 m/s到3.4 m/s——这一范围覆盖了典型的人类步行速度,并延伸到许多人实际的奔跑速度。值得注意的是,步行与奔跑的速度极限在步行到奔跑的常见转换速度附近对齐,尽管这一点并未在模型中事先设定。
从大量旋钮到集中化的控制策略
尽管有71个参数可用,作者想知道神经系统是否真需要调整全部参数来控制速度。他们分析了许多成功的步行与奔跑解,查看哪些反射通路随速度变化最大。通过统计方法,他们识别出一小组“关键”反射,这些反射的增益承载了与速度相关的大部分变异。令人惊讶的是,仅允许其中30个关键参数变化,就几乎保留了可实现的全部步行与奔跑速度范围。研究者随后拟合了将每个关键反射设置与模型整体速度关联起来的简单数学曲线。这样就构建了一个紧凑的速度调节函数:输入期望速度,它会输出一整套反射增益与偏移作为控制器参数。
实时改变速度与切换步态
接下来,团队测试了这个速度调节函数能否以两种方式使用。在“离线”模式中,他们在模拟前选择目标速度,从函数中生成反射参数,然后运行模型。在“在线”模式中,他们在模拟过程中更改目标速度,并持续在虚拟人物已经行走或奔跑时更新反射参数。在两种模式下,模型都能够在相当范围内平滑地调整速度,尤其是在奔跑时,实际速度与目标速度高度一致。步行的匹配不如奔跑完美,但仍沿着所请求的变化方向和平滑性跟随。通过将一整套反射参数从快速步行解突变到慢速奔跑解,他们还在没有额外高层时序规则的情况下产生了步行与奔跑之间的平滑过渡。
这对我们理解运动意味着什么
该研究并不主张真实的人类仅依赖反射;我们的神经系统也使用节律发生回路、平衡传感器和大脑指令。但这些模拟表明,原则上,经细致调谐与调节的反射本身即可在一个现实的身体结构中控制速度并支持步态转换。这提示脊髓反馈可能比先前认为的承担更多日常运动的工作,而更高层的大脑则可专注于规划与决策。结果也为依赖反射样反馈而非复杂中央控制器的多足机器人和假肢设备指明了更简单、更稳健的控制策略方向。
引用: Bunz, E.K., Bruel, A.J., Ijspeert, A.J. et al. Modulating reflexes enables speed control in simulated human walking and running. Sci Rep 16, 13028 (2026). https://doi.org/10.1038/s41598-026-48509-z
关键词: 人体运动, 脊髓反射, 步速, 神经肌肉骨骼建模, 从步行到奔跑的转变