Clear Sky Science · fr
La modulation des réflexes permet le contrôle de la vitesse dans la marche et la course humaines simulées
Pourquoi c’est important pour notre façon de bouger
La vie quotidienne est faite de changements fluides de vitesse : flâner, accélérer pour attraper un bus, ralentir pour trottiner ou se lancer dans une course. Nous ne réfléchissons que rarement à ce que le système nerveux doit accomplir pour gérer ces variations sans nous faire trébucher. Cette étude utilise des simulations informatiques détaillées d’un corps humain et de la moelle épinière pour poser une question simple mais profonde : des boucles de rétroaction rapides et automatiques dans la moelle — nos réflexes — pourraient-elles, à elles seules, gérer l’essentiel du contrôle de la vitesse et même aider à passer de la marche à la course ?
Regarder à l’intérieur du “pilote automatique” du corps
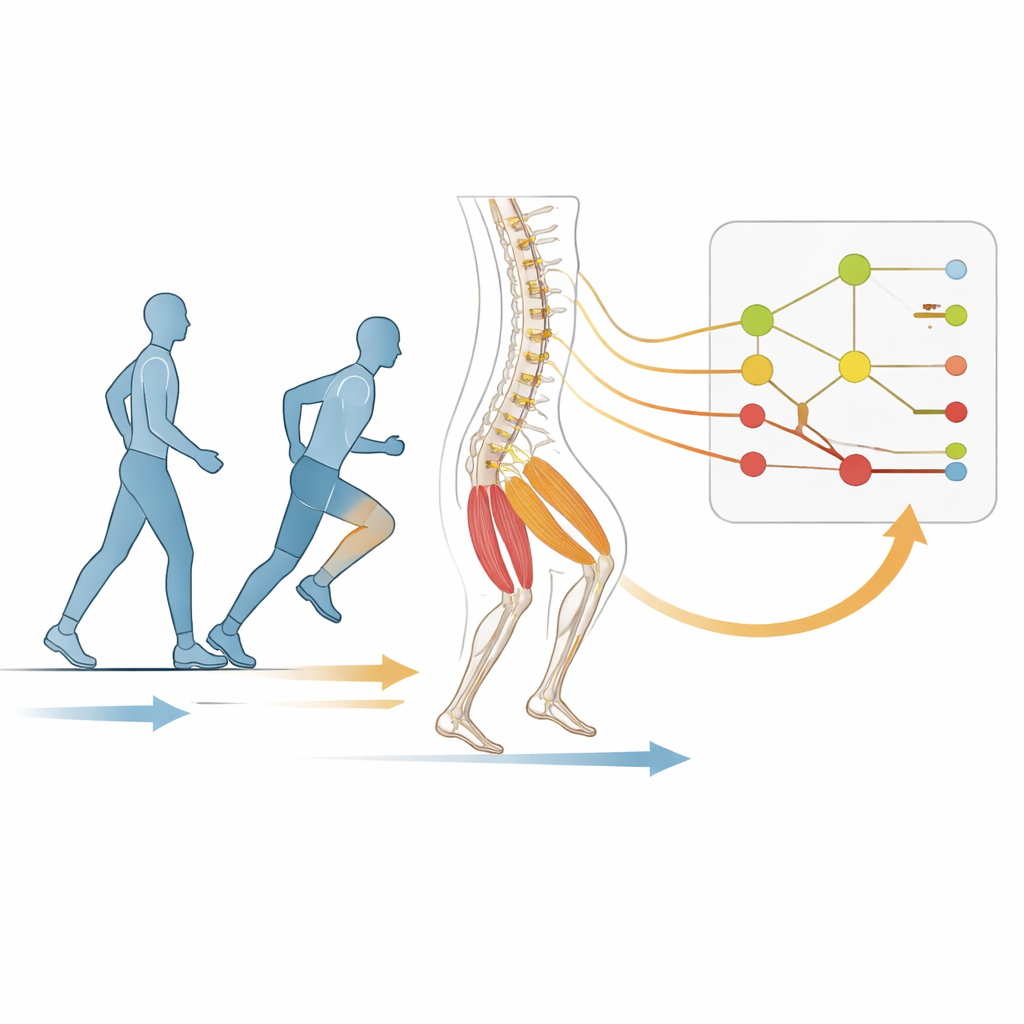
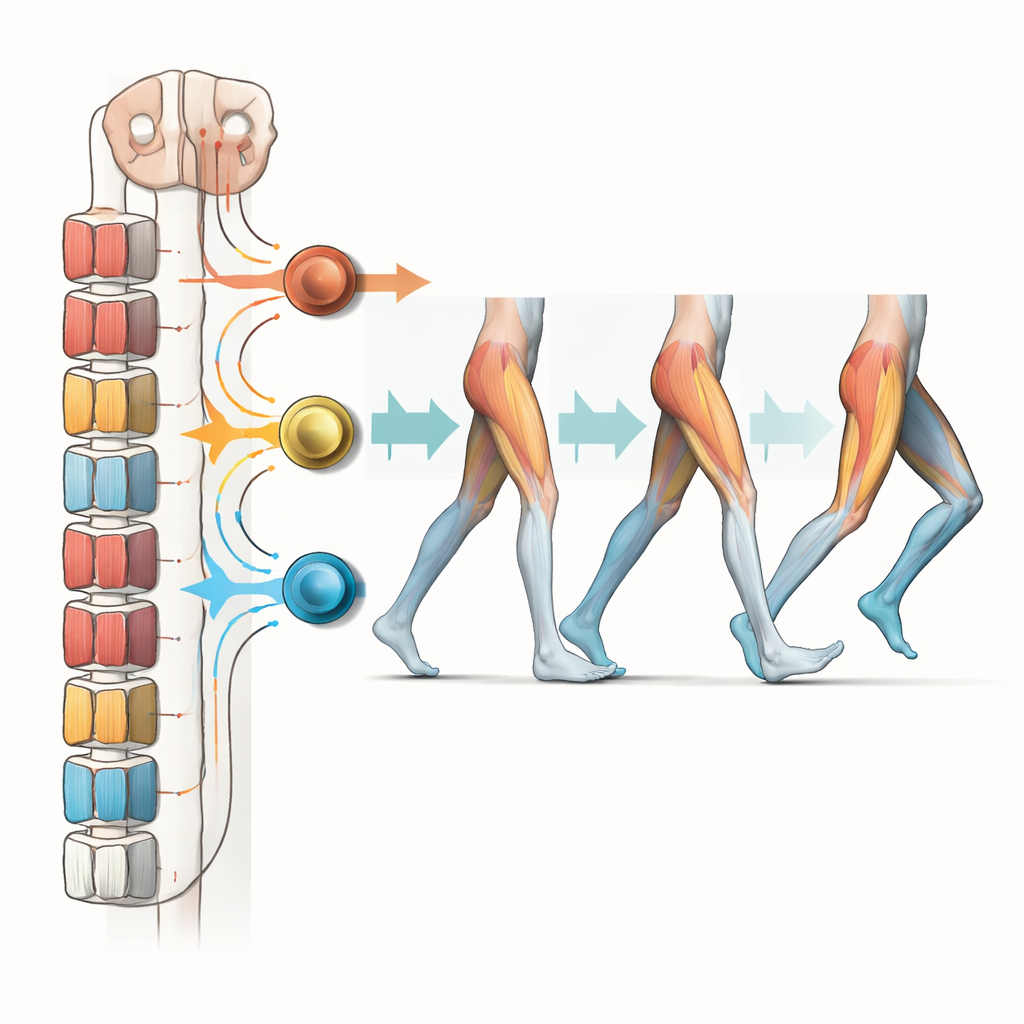
Quand nous marchons ou courons, le cerveau ne gère pas chaque muscle au détail près. La moelle épinière contient des circuits qui ajustent automatiquement l’activité musculaire en fonction des signaux venant des muscles et des tendons. Ces réflexes réagissent à la longueur et à la force des muscles et contribuent à nous maintenir debout et en mouvement. D’autres circuits, appelés générateurs centraux de rythme, peuvent produire une activité rythmique de façon autonome, tandis que les centres supérieurs du cerveau apportent planification et réglages fins. Comme tous ces systèmes sont étroitement imbriqués chez les personnes réelles, il est presque impossible d’isoler les réflexes en laboratoire. Les auteurs se tournent donc vers un modèle informatisé neuromusculosquelettique : un humain virtuel basé sur la physique, avec os, articulations et neuf muscles majeurs par jambe, tous actionnés uniquement par des rétroactions de type réflexe entre paires musculaires.
Tester ce que les réflexes peuvent accomplir seuls
Dans le modèle, chaque voie réflexe prend en entrée la longueur ou la force d’un muscle et renvoie un signal excitateur ou inhibiteur au même muscle ou à son antagoniste, mis à l’échelle par un gain et décalé par un offset. Au total, soixante-et-onze de ces paramètres sont ajustables. L’équipe a d’abord cherché des combinaisons de ces valeurs produisant une marche et une course stables à des vitesses très lentes et très rapides. Ils ont découvert qu’en changeant uniquement ces gains et offsets réflexes, le modèle pouvait marcher de façon stable d’environ 0,45 m/s à 1,93 m/s et courir de 2,0 m/s à 3,4 m/s — une plage qui couvre les vitesses typiques de marche humaines et atteint des vitesses de course réalistes pour de nombreuses personnes. Fait notable, les vitesses limites de la marche et de la course se sont alignées près de la vitesse habituelle de transition marche–course, bien que cela n’ait jamais été intégré au modèle.
De nombreux réglages à une stratégie de contrôle ciblée
Bien que 71 paramètres soient disponibles, les auteurs voulaient savoir si le système nerveux aurait vraiment besoin de tous les ajuster pour contrôler la vitesse. Ils ont analysé de nombreuses solutions de marche et de course réussies et cherché quelles voies réflexes changeaient le plus selon la vitesse. En utilisant une méthode statistique, ils ont identifié un plus petit groupe de réflexes “clés” dont les gains expliquaient la majeure partie de la variation liée à la vitesse. Remarquablement, ne permettre que la variation de 30 de ces paramètres clés préservait presque toute la plage de vitesses atteignables pour la marche et la course. Les chercheurs ont ensuite ajusté de simples courbes mathématiques liant chaque réglage réflexe clé à la vitesse globale du modèle. Cela a créé une fonction compacte de modulation de la vitesse : on entre une vitesse désirée, et elle fournit un ensemble complet de gains et d’offsets réflexes pour le contrôleur.
Changer de vitesse en temps réel et passer d’une allure à l’autre
Ensuite, l’équipe a testé si cette fonction de modulation de la vitesse pouvait être utilisée de deux manières. En mode “hors ligne”, ils choisissaient une vitesse cible avant la simulation, généraient les paramètres réflexes à partir de la fonction, puis lançaient le modèle. En mode “en ligne”, ils changeaient la vitesse cible pendant la simulation et mettaient continuellement à jour les paramètres réflexes pendant que la personne virtuelle marchait ou courait déjà. Dans les deux modes, le modèle a ajusté sa vitesse de manière fluide sur une large plage, en particulier pour la course, où les vitesses réelle et cible correspondaient étroitement. La marche montrait un ajustement moins parfait mais suivait néanmoins les changements demandés en forme et en direction. En basculant abruptement l’ensemble des paramètres réflexes d’une solution de marche rapide vers une solution de course lente, ils ont aussi produit des transitions fluides entre marche et course sans règles temporelles de haut niveau supplémentaires.
Ce que cela signifie pour notre compréhension du mouvement
L’étude ne prétend pas que les humains réels reposent uniquement sur les réflexes ; notre système nerveux utilise aussi des circuits générateurs de rythme, des capteurs d’équilibre et des commandes cérébrales. Mais ces simulations montrent que, en principe, des réflexes finement réglés et modulés seuls peuvent contrôler la vitesse et soutenir les transitions d’allure dans un corps réaliste. Cela suggère que la rétroaction spinale pourrait assumer une part plus importante du travail du mouvement quotidien qu’on ne le pensait, laissant aux centres cérébraux supérieurs le soin de se concentrer sur la planification et la prise de décision. Les résultats ouvrent aussi la voie à des stratégies de contrôle plus simples et plus robustes pour les robots à pattes et les prothèses, qui s’appuieraient davantage sur des rétroactions de type réflexe que sur des contrôleurs centraux complexes.
Citation: Bunz, E.K., Bruel, A.J., Ijspeert, A.J. et al. Modulating reflexes enables speed control in simulated human walking and running. Sci Rep 16, 13028 (2026). https://doi.org/10.1038/s41598-026-48509-z
Mots-clés: locomotion humaine, réflexes spinaux, vitesse de la démarche, modélisation neuromusculosquelettique, transition marche-course