Clear Sky Science · nl
Het moduleren van reflexen maakt snelheidsregeling mogelijk in gesimuleerd menselijk wandelen en rennen
Waarom dit ertoe doet voor hoe we ons bewegen
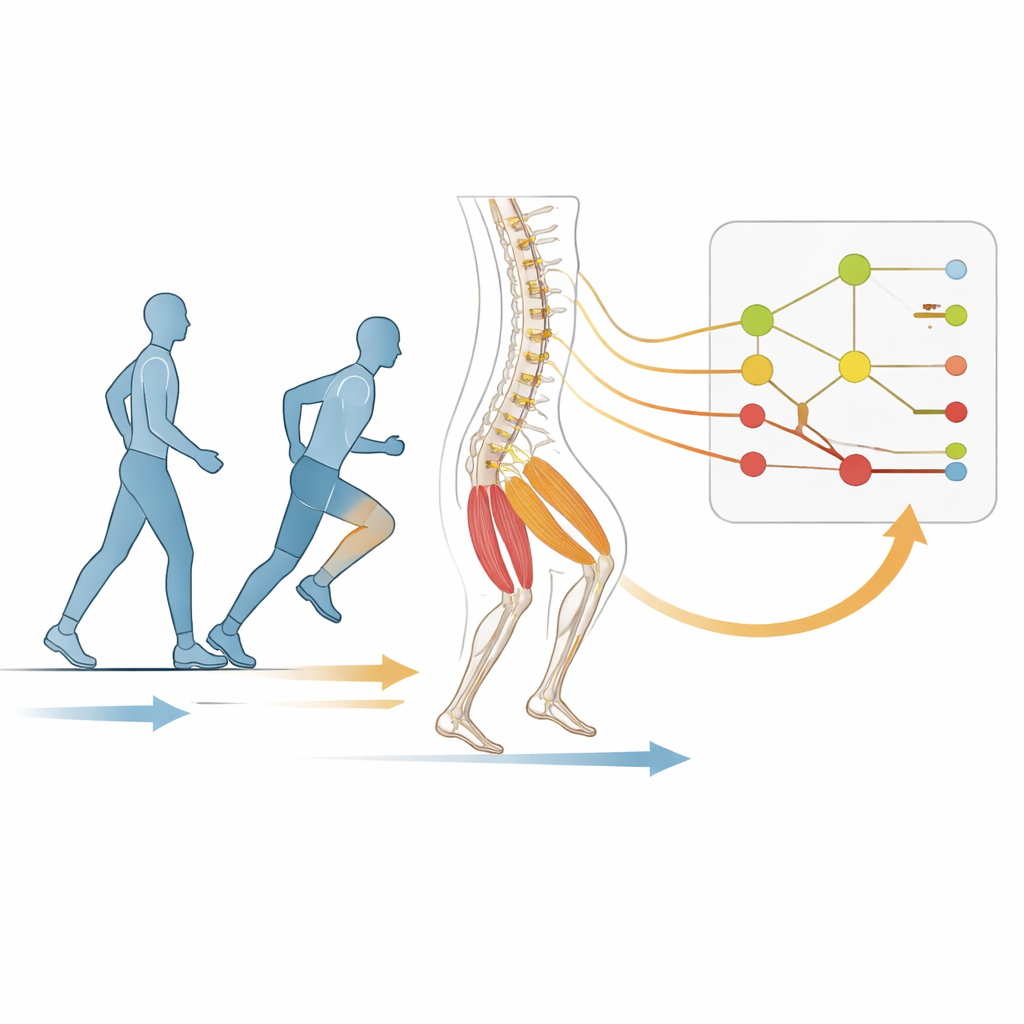
In het dagelijks leven veranderen we voortdurend en soepel van tempo: slenteren, versnellen om de bus te halen, geleidelijk in een jog komen of ineens in een sprint schieten. We denken zelden na over wat ons zenuwstelsel moet doen om die wisselingen te beheren zonder te struikelen. Deze studie gebruikt gedetailleerde computersimulaties van een menselijk lichaam en ruggenmerg om een eenvoudige maar fundamentele vraag te stellen: zouden snelle, automatische terugkoppelingslusjes in het ruggenmerg — onze reflexen — op zichzelf het grootste deel van deze snelheidsregeling kunnen afhandelen en zelfs kunnen helpen bij de overgang tussen lopen en rennen?
Een blik in de 'automaat' van het lichaam
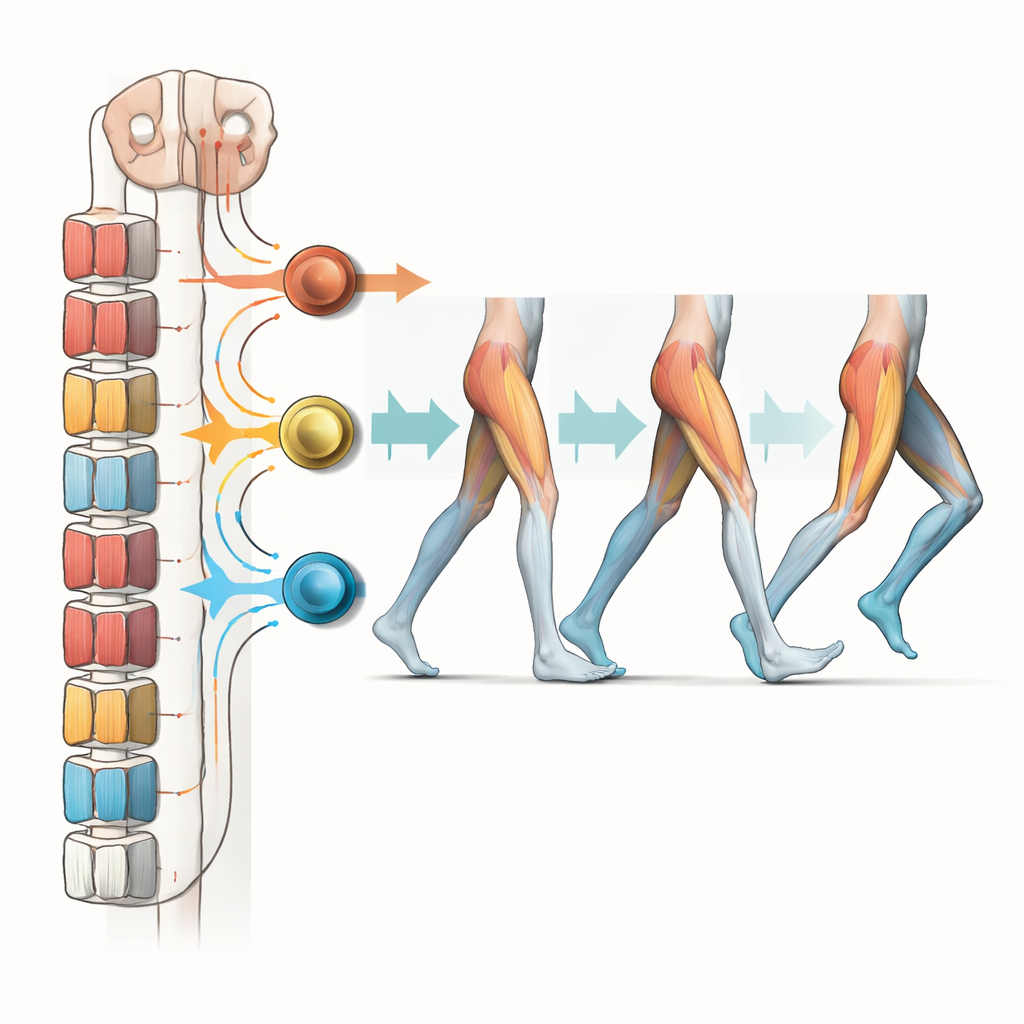
Als we lopen of rennen, stuurt de hersenen niet elke spier tot in detail aan. In plaats daarvan bevat het ruggenmerg circuits die de spieractiviteit automatisch aanpassen op basis van signalen van spieren en pezen. Deze reflexen reageren op hoe lang en hoe hard spieren werken en helpen ons rechtop en in beweging te houden. Andere circuits, centrale patroongeneratoren genoemd, kunnen ritmische activiteit zelfstandig produceren, en hogere hersencentra voegen planning en fijne afstelling toe. Omdat al deze systemen bij echte mensen sterk met elkaar verweven zijn, is het in het laboratorium vrijwel onmogelijk om reflexen geïsoleerd te testen. De auteurs wenden zich daarom tot een neuro-muskuloskeletaal computermodel: een fysica-gebaseerde virtuele mens met botten, gewrichten en negen belangrijke beenspieren per zijde, allemaal aangestuurd alleen door reflexachtige terugkoppeling tussen spierparen.
Testen wat reflexen op zichzelf kunnen
In het model neemt elk reflexpad spierlengte of -kracht als input en stuurt een stimulerend of remmend signaal terug naar dezelfde of een tegengestelde spier, geschaald met een versterking en verschoven met een offset. Er zijn in totaal 71 zulk verstelbare grootheden. Het team zocht eerst naar combinaties van deze waarden die stabiel wandelen en rennen genereerden bij zeer langzame en zeer hoge snelheden. Ze vonden dat door alleen deze reflexversterkingen en offsets te veranderen, het model gelijkmatig kon lopen van ongeveer 0,45 m/s tot 1,93 m/s en rennen van 2,0 m/s tot 3,4 m/s — een bereik dat typische menselijke loopsnelheden dekt en voor veel mensen realistische rensnelheden bereikt. Opmerkelijk was dat de grenssnelheden voor lopen en rennen samenvielen met de gebruikelijke menselijke overgangssnelheid van lopen naar rennen, hoewel dit nooit in het model was ingebouwd.
Van veel knoppen naar een gerichte controlemethode
Hoewel er 71 parameters beschikbaar zijn, wilden de auteurs weten of het zenuwstelsel werkelijk al die parameters zou moeten aanpassen om snelheid te controleren. Ze analyseerden vele succesvolle loop- en renoplossingen en keken welke reflexpaden het meest veranderden over snelheden. Met een statistische methode identificeerden ze een kleinere groep "sleutel"reflexen waarvan de versterkingen het grootste deel van de variatie met de snelheid verklaarden. Opmerkelijk genoeg behield het model vrijwel het volledige bereik van haalbare lopen en rennen toen alleen 30 van deze sleutelparameters mochten variëren. De onderzoekers pasten vervolgens eenvoudige wiskundige krommen die elke sleutelreflexinstelling koppelden aan de algemene snelheid van het model. Dit creëerde een compacte snelheidsmodulatiefunctie: voer een gewenste snelheid in, en het spitst een volledige set reflexversterkingen en offsets voor de controller uit.
Snelheid onderweg veranderen en van gang wisselen
Vervolgens testte het team of deze snelheidsmodulatiefunctie op twee manieren gebruikt kon worden. In de "offline" modus kozen ze een doelsnelheid vóór de simulatie, genereerden reflexparameters uit de functie en lieten vervolgens het model lopen. In de "online" modus veranderden ze de doelsnelheid tijdens de simulatie en werkten continu de reflexparameters bij terwijl de virtuele persoon al liep of rende. In beide modi paste het model zijn snelheid soepel aan over een substantieel bereik, vooral bij rennen, waar werkelijke en doel-snelheden nauw overeenkwamen. Lopen liet een minder perfecte match zien maar volgde nog steeds de gevraagde veranderingen in vorm en richting. Door abrupt de volledige set reflexparameters te schakelen van een snelle loopoplossing naar een trage renoplossing, produceerden ze ook vloeiende overgangen tussen lopen en rennen zonder aanvullende hoge-niveau timingregels.
Wat dit betekent voor ons begrip van beweging
De studie beweert niet dat echte mensen uitsluitend op reflexen vertrouwen; ons zenuwstelsel gebruikt ook ritme-genererende circuits, balanssensoriek en hersencommando's. Maar deze simulaties tonen aan dat, in principe, zorgvuldig afgestelde en gemoduleerde reflexen op zichzelf snelheid kunnen regelen en gangtransities kunnen ondersteunen in een realistisch lichaam. Dit suggereert dat spinale terugkoppeling mogelijk meer van het werk van alledaagse beweging op zich neemt dan eerder werd gewaardeerd, waardoor hogere hersencentra zich kunnen concentreren op planning en besluitvorming. De resultaten wijzen ook op eenvoudigere, robuustere controlestrategieën voor beenrobots en protheses die sterk leunen op reflexachtige terugkoppeling in plaats van complexe centrale controllers.
Bronvermelding: Bunz, E.K., Bruel, A.J., Ijspeert, A.J. et al. Modulating reflexes enables speed control in simulated human walking and running. Sci Rep 16, 13028 (2026). https://doi.org/10.1038/s41598-026-48509-z
Trefwoorden: menselijke voortbeweging, spinale reflexen, loopsnelheid, neuro-muskuloskeletale modellering, overgang van lopen naar rennen