Clear Sky Science · es
Modular los reflejos permite controlar la velocidad en simulaciones de la marcha y la carrera humana
Por qué esto importa para cómo nos movemos
La vida cotidiana está llena de cambios fluidos en la velocidad a la que nos movemos: pasear, acelerar para coger un autobús, pasar a trote o romper a correr. Rara vez pensamos en lo que debe hacer nuestro sistema nervioso para gestionar estos cambios sin tropezar. Este estudio utiliza simulaciones por ordenador detalladas de un cuerpo humano y de la médula espinal para plantear una pregunta simple pero profunda: ¿podrían los bucles de retroalimentación rápidos y automáticos en la médula—nuestros reflejos—por sí solos encargarse de la mayor parte de este control de velocidad e incluso ayudar a cambiar entre caminar y correr?
Mirando dentro del "piloto automático" del cuerpo
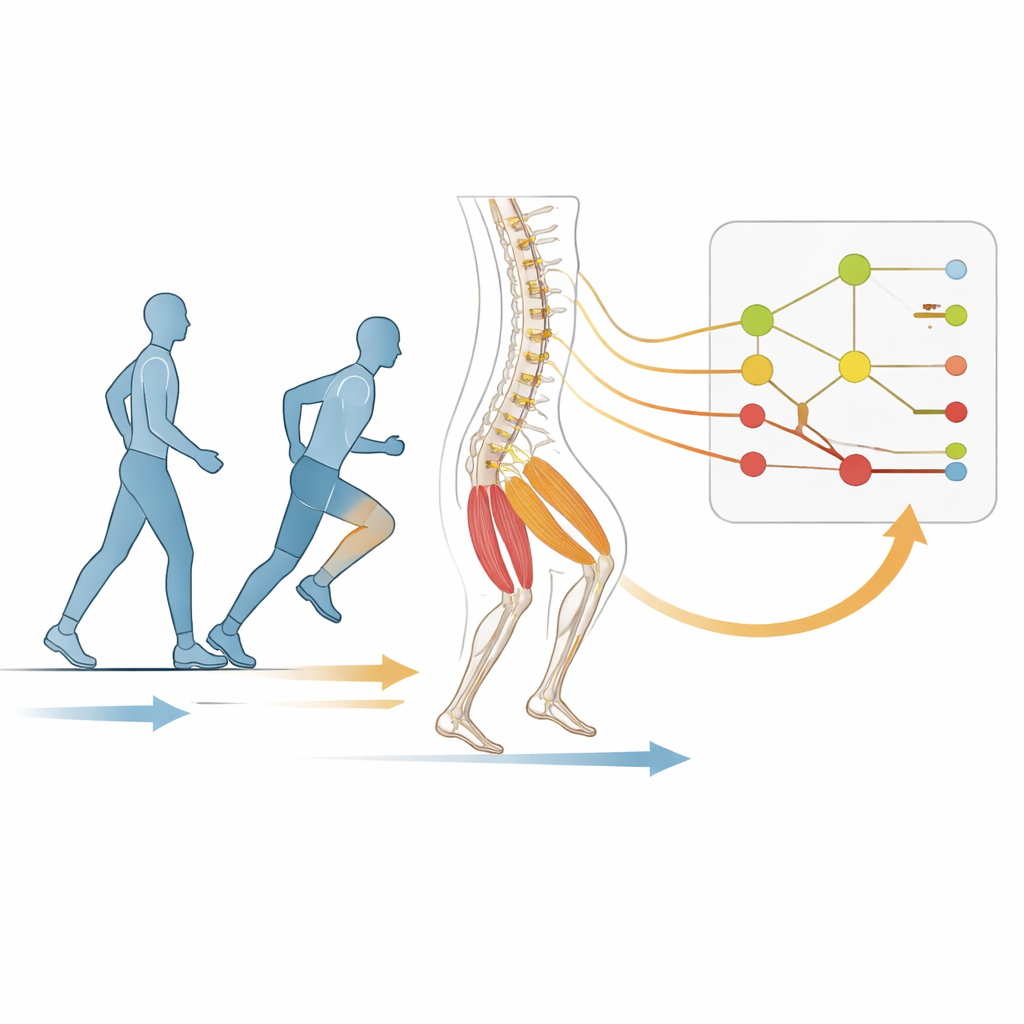
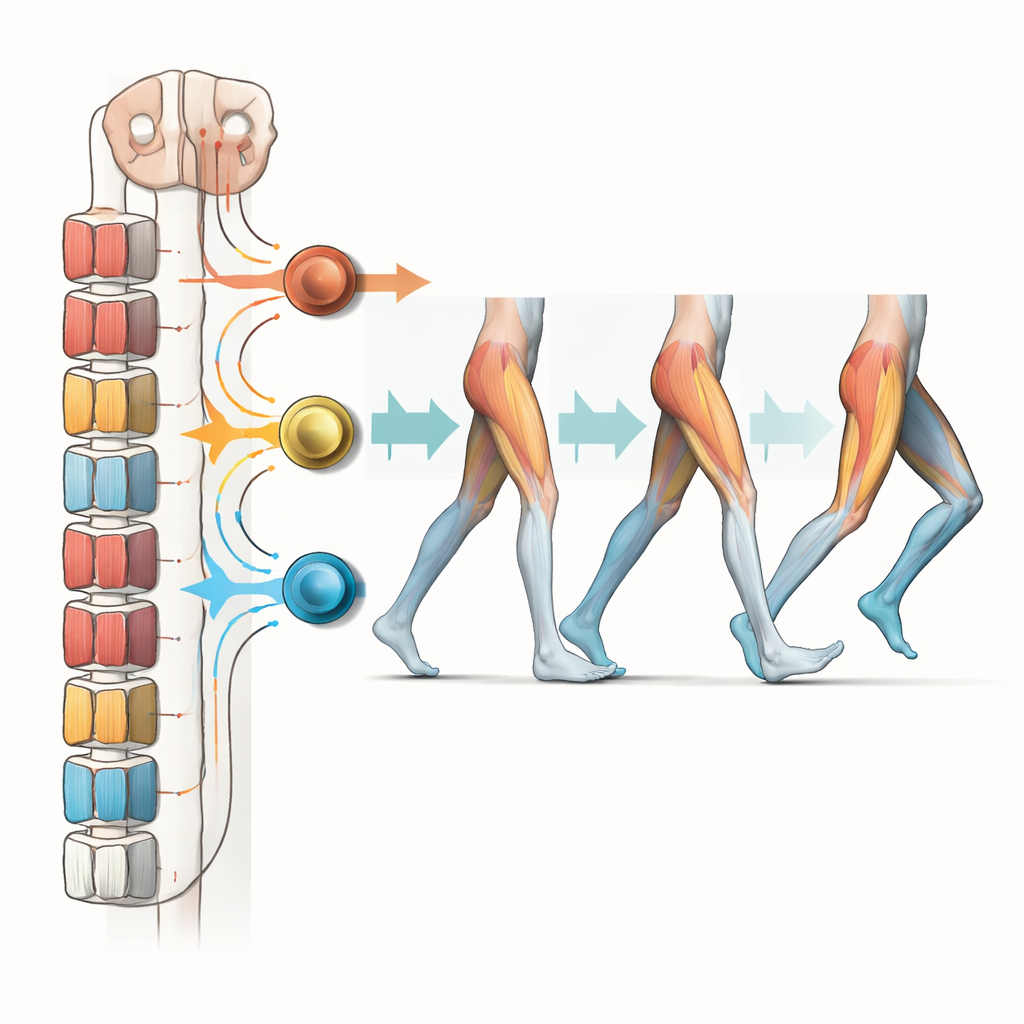
Cuando caminamos o corremos, el cerebro no microgestiona cada músculo. En su lugar, la médula espinal contiene circuitos que ajustan automáticamente la actividad muscular basándose en señales de músculos y tendones. Estos reflejos responden a cuánto se alargan y cuánta fuerza generan los músculos, y ayudan a mantenernos erguidos y en movimiento. Otros circuitos llamados generadores centrales de patrón pueden producir actividad rítmica por sí mismos, y centros cerebrales superiores aportan planificación y afinado. Como todos estos sistemas están estrechamente entrelazados en personas reales, es casi imposible probar los reflejos aisladamente en el laboratorio. Los autores recurren en cambio a un modelo computacional neuromuscoesquelético: un humano virtual basado en física con huesos, articulaciones y nueve músculos principales de la pierna por lado, todo controlado únicamente por retroalimentación tipo reflejo entre pares de músculos.
Probar qué pueden hacer los reflejos por sí solos
En el modelo, cada vía refleja toma la longitud o la fuerza muscular y envía una señal excitatoria o inhibitoria de vuelta al mismo músculo o a su antagonista, escalada por una ganancia y desplazada por un offset. Hay 71 de estos valores ajustables en total. El equipo buscó primero combinaciones de estos valores que produjeran marcha y carrera estables a velocidades muy lentas y muy rápidas. Encontraron que cambiando únicamente estas ganancias y offsets, el modelo podía caminar de forma estable desde unos 0,45 m/s hasta 1,93 m/s y correr de 2,0 m/s a 3,4 m/s—un rango que cubre velocidades típicas de caminata humana y alcanza velocidades de carrera realistas para muchas personas. Es notable que las velocidades límite para caminar y correr coincidieron cerca de la usual velocidad de transición de caminar a correr en humanos, a pesar de que eso nunca se incorporó explícitamente en el modelo.
De muchos mandos a una estrategia de control focalizada
Aunque hay 71 parámetros disponibles, los autores quisieron saber si el sistema nervioso realmente necesitaría ajustar todos ellos para controlar la velocidad. Analizaron muchas soluciones exitosas de marcha y carrera y preguntaron qué vías reflejas cambiaban más con la velocidad. Usando un método estadístico, identificaron un grupo más pequeño de reflejos "clave" cuyas ganancias llevaban la mayor parte de la variación relacionada con la velocidad. Sorprendentemente, permitir que solo 30 de estos parámetros clave variaran preservó casi todo el rango de velocidades de marcha y carrera alcanzables. Los investigadores luego ajustaron curvas matemáticas simples que vinculaban cada ajuste reflejo clave con la velocidad general del modelo. Esto creó una función compacta de modulación de velocidad: introduces una velocidad deseada y devuelve un conjunto completo de ganancias y offsets reflejos para el controlador.
Cambiar la velocidad sobre la marcha y alternar el patrón de desplazamiento
A continuación, el equipo probó si esta función de modulación de velocidad podía usarse de dos maneras. En modo "offline", eligieron una velocidad objetivo antes de la simulación, generaron parámetros reflejos a partir de la función y después hicieron funcionar el modelo. En modo "online", cambiaron la velocidad objetivo durante la simulación y actualizaron continuamente los parámetros reflejos mientras la persona virtual ya caminaba o corría. En ambos modos, el modelo ajustó su velocidad de forma fluida en un rango considerable, especialmente al correr, donde las velocidades reales y objetivo coincidían de cerca. La marcha mostró un ajuste menos perfecto pero aún siguió los cambios solicitados en forma y dirección. Al cambiar abruptamente el conjunto completo de parámetros reflejos de una solución de caminata rápida a una de carrera lenta, también produjeron transiciones suaves entre caminar y correr sin reglas superiores de temporización adicionales.
Qué implica esto para nuestra comprensión del movimiento
El estudio no afirma que los humanos reales dependan únicamente de los reflejos; nuestro sistema nervioso también usa circuitos generadores de ritmo, sensores de equilibrio y órdenes cerebrales. Pero estas simulaciones demuestran que, en principio, reflejos cuidadosamente afinados y modulados por sí solos pueden controlar la velocidad y facilitar transiciones de marcha en un cuerpo realista. Esto sugiere que la retroalimentación espinal podría asumir más trabajo del movimiento cotidiano de lo que se apreciaba, dejando a los centros cerebrales superiores centrarse en la planificación y la toma de decisiones. Los resultados también apuntan hacia estrategias de control más simples y robustas para robots con patas y prótesis que se apoyen fuertemente en retroalimentación tipo reflejo en lugar de controladores centrales complejos.
Cita: Bunz, E.K., Bruel, A.J., Ijspeert, A.J. et al. Modulating reflexes enables speed control in simulated human walking and running. Sci Rep 16, 13028 (2026). https://doi.org/10.1038/s41598-026-48509-z
Palabras clave: locomoción humana, reflejos espinales, velocidad de la marcha, modelado neuromuscoesquelético, transición de caminar a correr