Clear Sky Science · pt
Modular os reflexos permite controle de velocidade na simulação de caminhada e corrida humanas
Por que isso importa para como nos movemos
A vida cotidiana é repleta de mudanças suaves na velocidade: passear, acelerar para alcançar um ônibus, entrar gradualmente em uma corrida leve ou disparar em uma corrida rápida. Raramente pensamos no que o nosso sistema nervoso precisa fazer para gerenciar essas variações sem nos fazer tropeçar. Este estudo usa simulações computacionais detalhadas de um corpo humano e da medula espinhal para fazer uma pergunta simples, porém profunda: seriam os circuitos de feedback rápidos e automáticos da medula — nossos reflexos — capazes, por si só, de controlar a maior parte dessa variação de velocidade e até de ajudar na transição entre caminhar e correr?
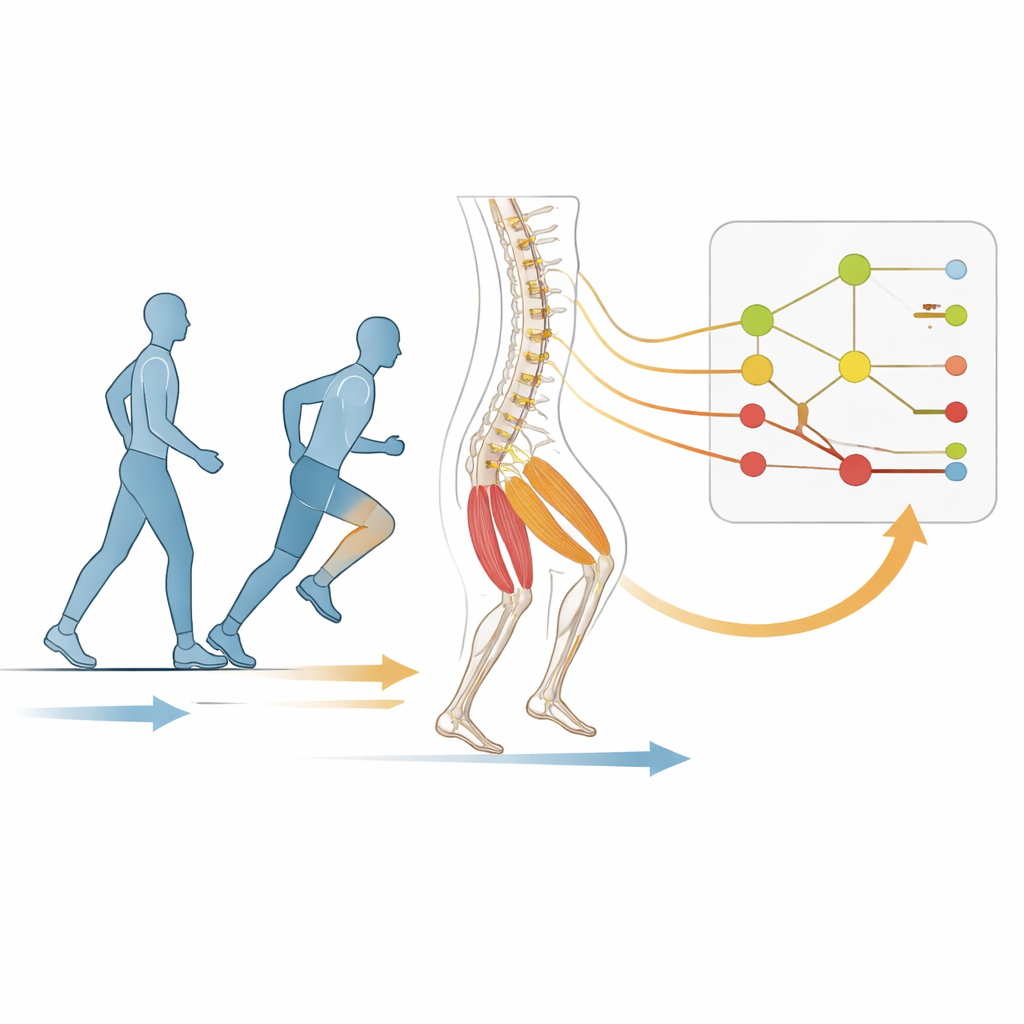
Vendo por dentro o "piloto automático" do corpo
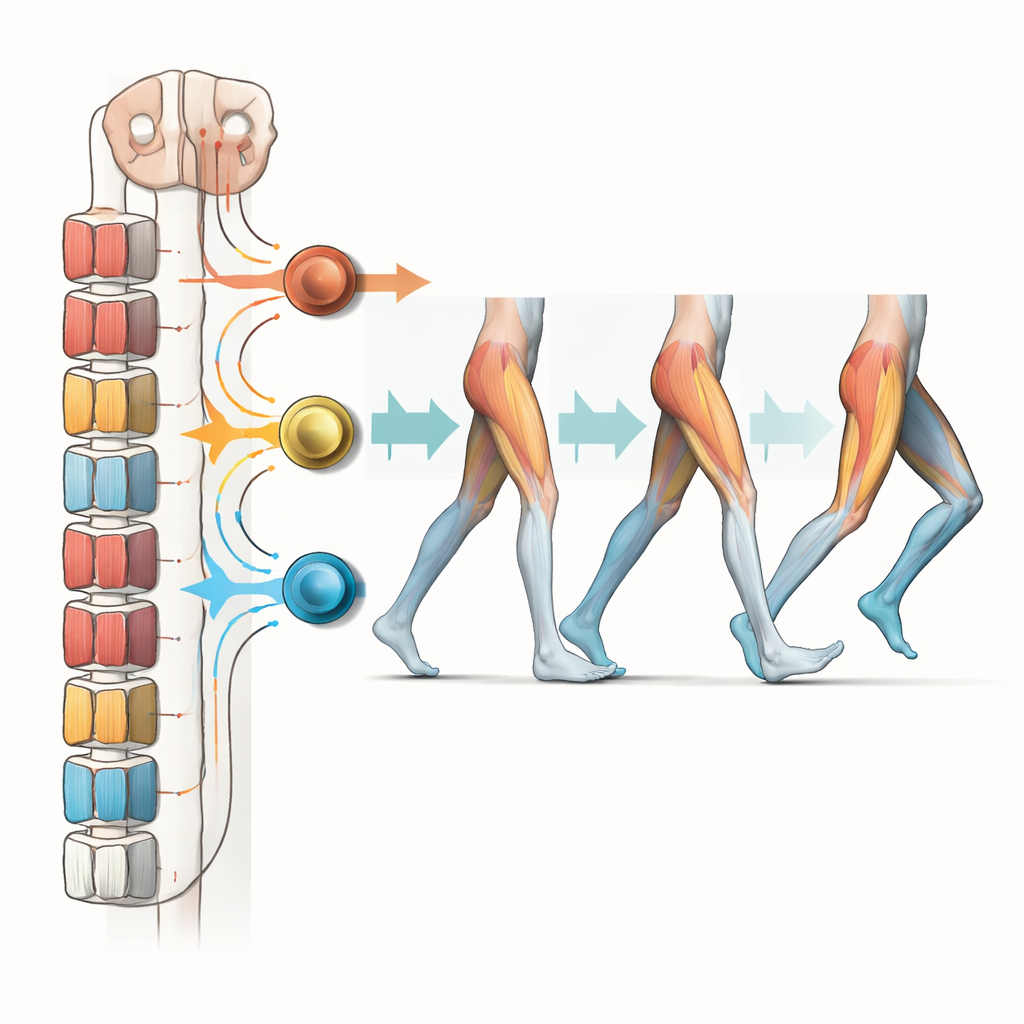
Quando caminhamos ou corremos, o cérebro não micros gerencia cada músculo. Em vez disso, a medula espinhal contém circuitos que ajustam automaticamente a atividade muscular com base em sinais de músculos e tendões. Esses reflexos reagem ao comprimento e à força dos músculos e ajudam a nos manter eretos e em movimento. Outros circuitos, chamados geradores centrais de padrão, podem produzir atividade rítmica por conta própria, e centros cerebrais superiores acrescentam planejamento e refinamento. Como todos esses sistemas estão fortemente interligados em pessoas reais, é quase impossível testar os reflexos isoladamente no laboratório. Os autores voltam-se para um modelo computadorizado neuromuscoesquelético: um humano virtual baseado em física com ossos, articulações e nove músculos principais por perna, todos acionados apenas por feedbacks semelhantes a reflexos entre pares musculares.
Testando o que os reflexos conseguem sozinhos
No modelo, cada via reflexa recebe informações sobre comprimento ou força muscular e envia um sinal excitatório ou inibitório de volta ao mesmo músculo ou a um antagonista, escalado por um ganho e deslocado por um offset. Há 71 desses números ajustáveis no total. A equipe primeiro procurou combinações desses valores que produzissem caminhada e corrida estáveis em velocidades muito lentas e muito rápidas. Descobriram que, mudando apenas esses ganhos e offsets reflexos, o modelo podia caminhar de forma estável de cerca de 0,45 m/s a 1,93 m/s e correr de 2,0 m/s a 3,4 m/s — uma faixa que cobre velocidades típicas de caminhada humana e alcança velocidades de corrida realistas para muitas pessoas. Notavelmente, as velocidades-limite para caminhar e correr alinhavam-se próximas à velocidade usual de transição de caminhar para correr em humanos, apesar de isso nunca ter sido incorporado ao modelo.
De muitos botões a uma estratégia de controle focada
Embora 71 parâmetros estejam disponíveis, os autores queriam saber se o sistema nervoso realmente precisaria ajustar todos eles para controlar a velocidade. Eles analisaram muitas soluções bem-sucedidas de caminhada e corrida e perguntaram quais vias reflexas mudavam mais entre as velocidades. Usando um método estatístico, identificaram um grupo menor de reflexos "chave" cujos ganhos carregavam a maior parte da variação relacionada à velocidade. Surpreendentemente, permitir que apenas 30 desses parâmetros-chave variassem preservou quase toda a faixa de velocidades alcançáveis de caminhada e corrida. Em seguida, os pesquisadores ajustaram curvas matemáticas simples que ligavam cada configuração de reflexo-chave à velocidade geral do modelo. Isso criou uma função de modulação de velocidade compacta: informe uma velocidade desejada e ela gera um conjunto completo de ganhos e offsets reflexos para o controlador.
Mudar a velocidade em tempo real e trocar de marcha
Em seguida, a equipe testou se essa função de modulação de velocidade poderia ser usada de duas maneiras. No modo "offline", escolheram uma velocidade-alvo antes da simulação, geraram parâmetros reflexos a partir da função e então executaram o modelo. No modo "online", mudaram a velocidade-alvo durante a simulação e atualizaram continuamente os parâmetros reflexos enquanto a pessoa virtual já estava caminhando ou correndo. Em ambos os modos, o modelo ajustou sua velocidade de forma suave em uma faixa substancial, especialmente na corrida, onde velocidades reais e alvo coincidiram de forma muito próxima. A caminhada mostrou um ajuste menos perfeito, mas ainda seguiu as mudanças solicitadas em forma e direção. Ao alternar abruptamente o conjunto completo de parâmetros reflexos de uma solução de caminhada rápida para uma solução de corrida lenta, eles também produziram transições suaves entre caminhada e corrida sem regras superiores adicionais de temporização.
O que isso significa para nossa compreensão do movimento
O estudo não afirma que humanos reais dependam apenas de reflexos; nosso sistema nervoso também usa circuitos geradores de ritmo, sensores de equilíbrio e comandos cerebrais. Mas essas simulações demonstram que, em princípio, reflexos cuidadosamente afinados e modulados por si só podem controlar a velocidade e suportar transições de marcha em um corpo realista. Isso sugere que o feedback espinhal pode assumir mais do trabalho do movimento cotidiano do que se apreciava anteriormente, liberando centros cerebrais superiores para focar no planejamento e na tomada de decisão. Os resultados também apontam para estratégias de controle mais simples e robustas para robôs com pernas e dispositivos protéticos que se apoiam fortemente em feedbacks semelhantes a reflexos em vez de controladores centrais complexos.
Citação: Bunz, E.K., Bruel, A.J., Ijspeert, A.J. et al. Modulating reflexes enables speed control in simulated human walking and running. Sci Rep 16, 13028 (2026). https://doi.org/10.1038/s41598-026-48509-z
Palavras-chave: locomoção humana, reflexos espinhais, velocidade da marcha, modelagem neuromuscoesquelética, transição de caminhar para correr