Clear Sky Science · sv
Att modulera reflexer möjliggör hastighetskontroll i simulerad mänsklig gång och löpning
Varför detta spelar roll för hur vi rör oss
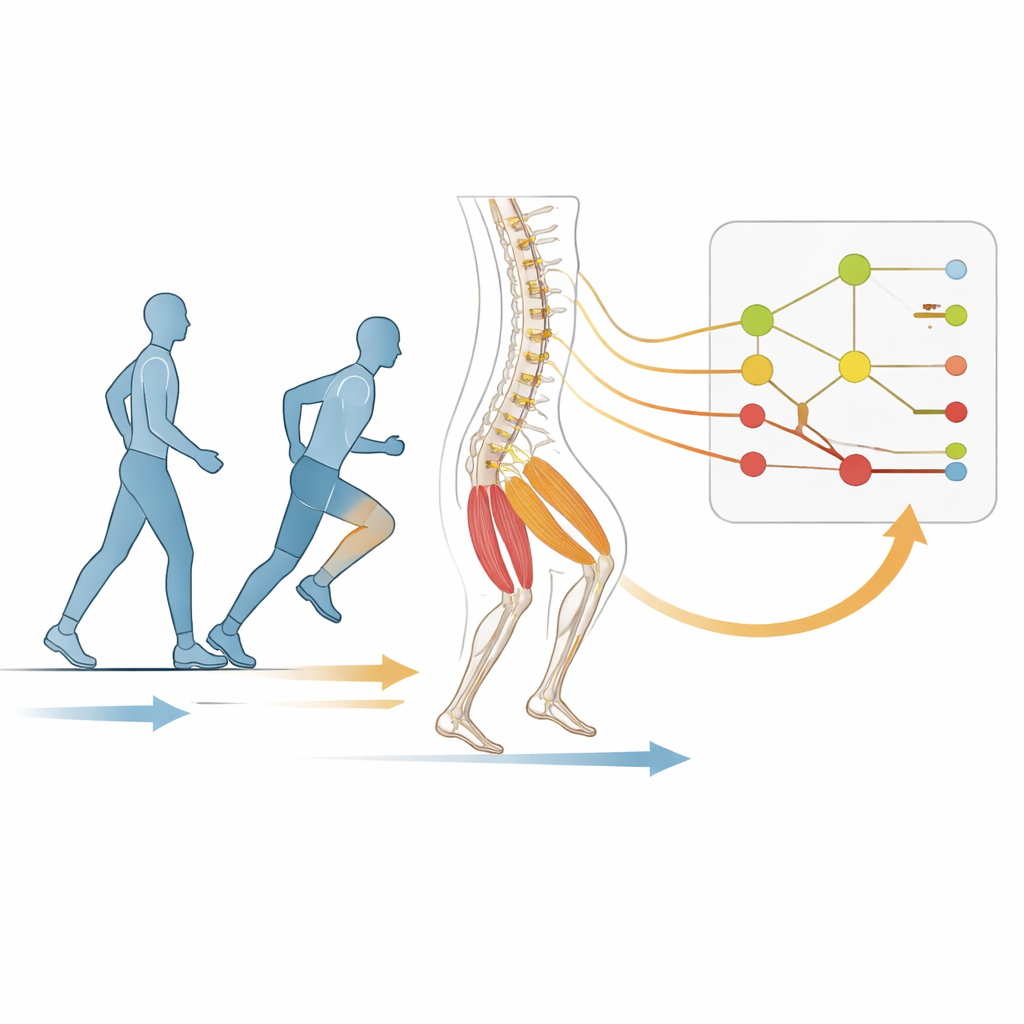
Det vardagliga livet innehåller många mjuka förändringar i hur snabbt vi rör oss: promenera, öka farten för att hinna med en buss, lätta in i ett jogg eller bryta ut i ett löpsteg. Vi tänker sällan på vad vårt nervsystem måste göra för att hantera dessa skiften utan att snubbla. Denna studie använder detaljerade datorsimuleringar av en mänsklig kropp och ryggmärg för att ställa en enkel men djup fråga: kan snabba, automatiska återkopplingsslingor i ryggmärgen — våra reflexer — på egen hand hantera större delen av denna hastighetskontroll och till och med hjälpa till att byta mellan gång och löpning?
Att titta in i kroppens ”autopilot”
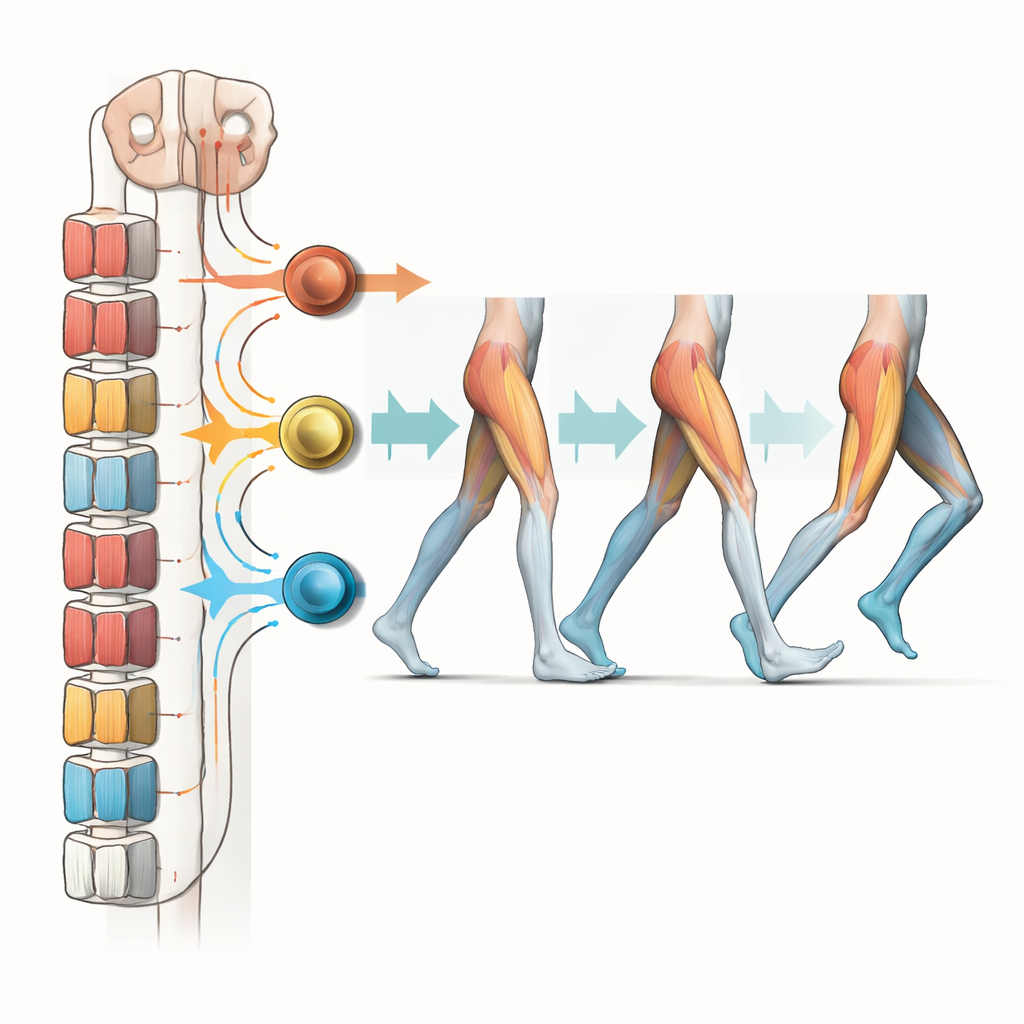
När vi går eller springer mikrostyr hjärnan inte varje muskel. Istället innehåller ryggmärgen kretsar som automatiskt justerar muskelaktivitet utifrån signaler från muskler och senor. Dessa reflexer reagerar på hur lång och hur stark en muskel arbetar, och de hjälper oss att hålla oss upprätta och i rörelse. Andra kretsar, kallade centrala mönstergeneratorer, kan själva producera rytmisk aktivitet, och högre hjärncentra bidrar med planering och finjustering. Eftersom alla dessa system är tätt sammanflätade hos riktiga människor är det nästan omöjligt att testa reflexer isolerat i laboratoriet. Författarna vänder sig därför till en neuromuskuloskeletal datormodell: en fysikbaserad virtuell människa med ben, leder och nio stora benmuskler per sida, alla drivna endast av reflexliknande återkoppling mellan muskelpar.
Testa vad reflexer kan göra på egen hand
I modellen tar varje reflexväg in muskelns längd eller kraft och skickar en exciterande eller hämmande signal tillbaka till samma muskel eller en motverkande muskel, skalad med en förstärkningsfaktor och förskjuten med en offset. Det finns totalt 71 sådana justerbara värden. Teamet sökte först efter kombinationer av dessa värden som gav stabil gång och löpning vid mycket långsamma respektive mycket snabba hastigheter. De fann att genom att enbart ändra dessa reflexvinster och offsetter kunde modellen gå stadigt från cirka 0,45 m/s till 1,93 m/s och springa från 2,0 m/s till 3,4 m/s — ett spann som täcker typiska mänskliga gånghastigheter och når in i realistiska löphastigheter för många personer. Noterbart var att gränshastigheterna för gång och löpning hamnade nära den vanliga mänskliga övergångshastigheten från gång till löpning, trots att detta aldrig var inbyggt i modellen.
Från många rattar till en fokuserad styrstrategi
Även om 71 parametrar är tillgängliga ville författarna ta reda på om nervsystemet faktiskt skulle behöva justera alla dem för att kontrollera hastigheten. De analyserade många framgångsrika gång- och löpningslösningar och undersökte vilka reflexvägar som förändrades mest över hastigheterna. Med en statistisk metod identifierade de en mindre grupp ”nyckel”reflexer vars vinster stod för merparten av variationen relaterad till hastighet. Anmärkningsvärt nog bevarades nästan hela spannet av uppnåeliga gång- och löphastigheter även om endast 30 av dessa nyckelparametrar tilläts variera. Forskarna passade sedan enkla matematiska kurvor som kopplade varje nyckelreflexs inställning till modellens övergripande hastighet. Detta skapade en kompakt hastighetsmoduleringsfunktion: mata in en önskad hastighet, och den ger uppsättningen av reflexvinster och offsetter för regulatorn.
Ändra hastighet i farten och byta gångart
Nästa steg var att testa om denna hastighetsmoduleringsfunktion kunde användas på två sätt. I ”offline”-läge valde de en målhastighet innan simuleringen, genererade reflexparametrar från funktionen och körde sedan modellen. I ”online”-läge ändrade de målhastigheten under simuleringen och uppdaterade kontinuerligt reflexparametrarna medan den virtuella personen redan gick eller sprang. I båda lägena justerade modellen sin hastighet mjukt över ett betydande intervall, särskilt vid löpning där faktiskt och målsatta hastigheter matchade nära. Gång visade en mindre perfekt match men följde ändå de begärda förändringarna i form och riktning. Genom att abrupt byta hela uppsättningen reflexparametrar från en snabb gånglösning till en långsam löplösning framkallade de också mjuka övergångar mellan gång och löpning utan ytterligare högre nivåns tidsregler.
Vad detta betyder för vår förståelse av rörelse
Studien påstår inte att riktiga människor enbart förlitar sig på reflexer; vårt nervsystem använder också rytmgenererande kretsar, balanssensorer och hjärnkommandon. Men dessa simuleringar visar att, i princip, noggrant stämda och modulerade reflexer på egen hand kan kontrollera hastighet och stödja gångartsövergångar i en realistisk kropp. Detta antyder att ryggmärgsåterkoppling kan bära en större del av det dagliga rörelsearbetet än tidigare uppskattat, vilket lämnar högre hjärncentra mer utrymme för planering och beslutsfattande. Resultaten pekar också mot enklare, mer robusta styrstrategier för benrobotar och proteser som förlitar sig tungt på reflexliknande återkoppling snarare än komplexa centrala regulatorer.
Citering: Bunz, E.K., Bruel, A.J., Ijspeert, A.J. et al. Modulating reflexes enables speed control in simulated human walking and running. Sci Rep 16, 13028 (2026). https://doi.org/10.1038/s41598-026-48509-z
Nyckelord: mänsklig lokomotion, ryggmärgsreflexer, gånghastighet, neuromuskuloskeletala modeller, övergång från gång till löpning