Clear Sky Science · ru
Модуляция рефлексов позволяет контролировать скорость в моделированном человеческом походке и беге
Почему это важно для того, как мы движемся
В повседневной жизни мы постоянно плавно меняем скорость: прогулка, ускорение, чтобы успеть на автобус, лёгкий переход в бег трусцой или внезапный рывок в бег. Мы редко задумываемся о том, что нервной системе требуется, чтобы управлять этими переходами, не спотыкаясь. В этом исследовании используют детализированные компьютерные симуляции человеческого тела и спинного мозга, чтобы задать простой, но глубокий вопрос: могут ли быстрые автоматические петли обратной связи в спинном мозге — наши рефлексы — сами по себе справляться с большей частью контроля скорости и даже помогать при переключении между ходьбой и бегом?
Взгляд внутрь «автопилота» тела
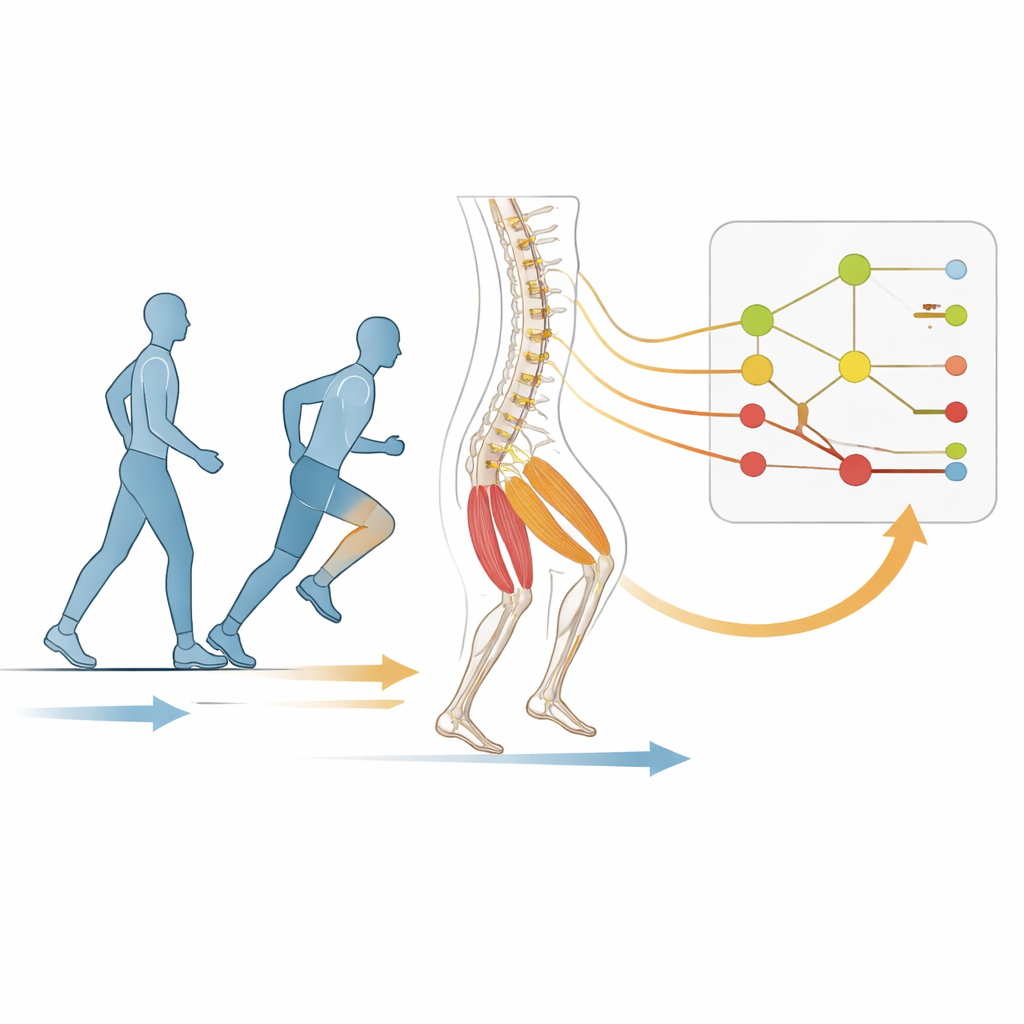
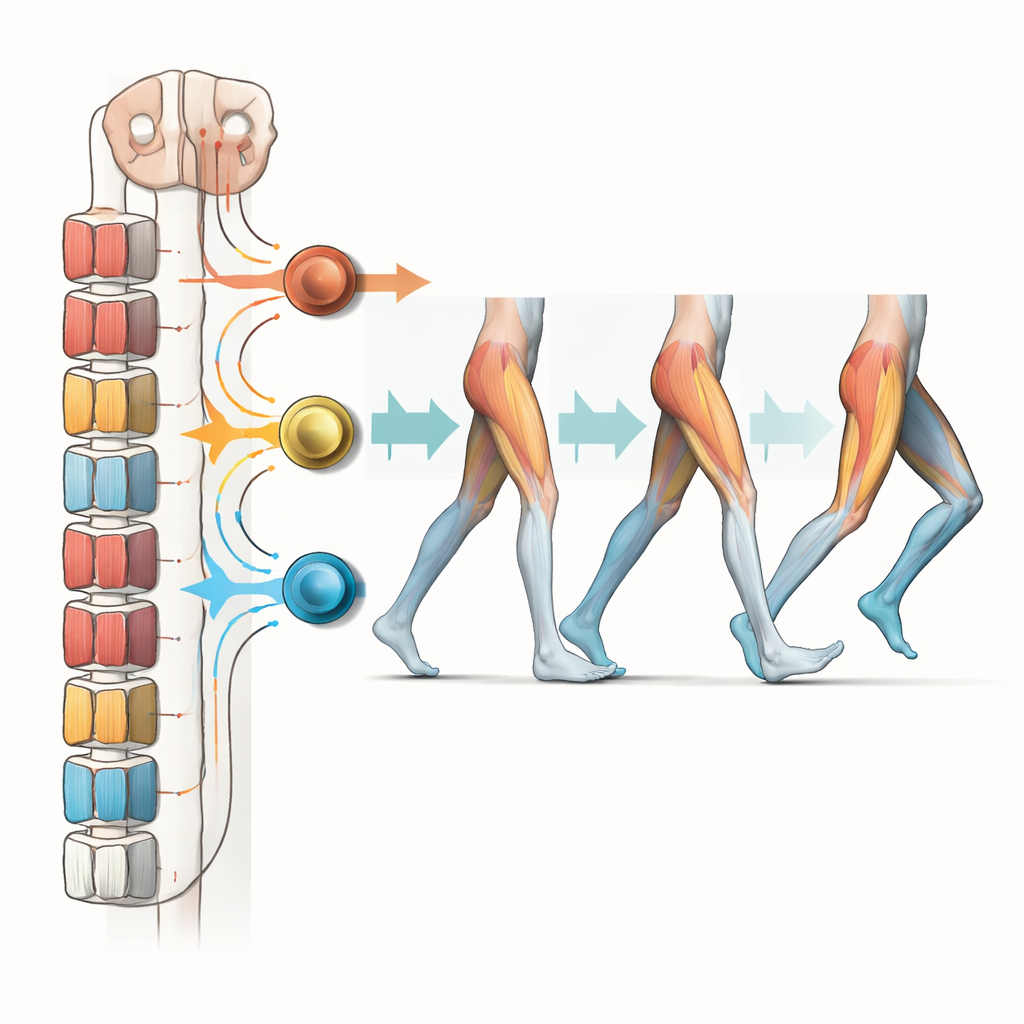
Когда мы идём или бежим, мозг не управляет каждой мышцей вручную. Вместо этого спинной мозг содержит цепи, которые автоматически корректируют активность мышц на основе сигналов от мышц и сухожилий. Эти рефлексы реагируют на длину и напряжение мышц и помогают нам сохранять равновесие и движение. Другие цепи, называемые центральными генераторами паттернов, могут сами по себе генерировать ритмическую активность, а высшие центры мозга добавляют планирование и тонкую настройку. Поскольку все эти системы тесно переплетены у реальных людей, в лаборатории почти невозможно протестировать рефлексы в изоляции. Авторы обратились к нейромышечно-скелетной компьютерной модели: основанному на физике виртуальному человеку с костями, суставами и девятью основными мышцами ноги с каждой стороны, управляемому исключительно рефлексоподобной обратной связью между мышечными парами.
Проверка того, что рефлексы могут сделать сами по себе
В модели каждый рефлекторный путь получает информацию о длине или силе мышцы и посылает возбуждающий или тормозящий сигнал обратно той же или противоположной мышце, масштабируемый коэффициентом усиления и смещённый на оффсет. Всего имеется 71 настраиваемый параметр. Команда вначале искала комбинации этих значений, которые давали бы устойчивую ходьбу и бег на очень медленных и очень быстрых скоростях. Они обнаружили, что изменяя только эти коэффициенты усиления и смещения, модель могла устойчиво ходить примерно от 0,45 м/с до 1,93 м/с и бегать от 2,0 м/с до 3,4 м/с — диапазон, покрывающий типичные скорости человеческой ходьбы и доходящий до реалистичных скоростей бега для многих людей. Примечательно, что предельные скорости для ходьбы и бега оказались близки к обычной скорости перехода от ходьбы к бегу у человека, хотя это вовсе не было заложено в модель заранее.
От множества регуляторов к целенаправленной стратегии управления
Хотя доступно 71 параметр, авторы хотели понять, потребовалось бы ли нервной системе настраивать все они для управления скоростью. Они проанализировали множество успешных решений для ходьбы и бега и выяснили, какие рефлекторные пути изменялись сильнее всего при смене скорости. С помощью статистического метода они выделили меньшую группу «ключевых» рефлексов, величины усиления которых вносили основную часть вариации, связанной со скоростью. Удивительно, но допуская изменение только 30 из этих ключевых параметров, можно было сохранить почти весь диапазон достижимых скоростей ходьбы и бега. Исследователи затем аппроксимировали простыми математическими кривыми связь каждой настройки ключевого рефлекса с общей скоростью модели. Это создало компактную функцию модуляции скорости: задаёшь желаемую скорость, и функция выдаёт полный набор коэффициентов усиления и смещений для контроллера.
Изменение скорости на ходу и переключение походок
Далее команда проверила, можно ли использовать эту функцию модуляции скорости двумя способами. В «офлайн»-режиме они выбирали целевую скорость до начала симуляции, генерировали параметры рефлексов из функции и затем запускали модель. В «онлайн»-режиме они меняли целевую скорость во время симуляции и непрерывно обновляли параметры рефлексов уже в процессе ходьбы или бега виртуального человека. В обоих режимах модель плавно адаптировала свою скорость в значительном диапазоне, особенно при беге, где фактическая и целевая скорости хорошо совпадали. Ходьба показывала менее идеальное совпадение, но всё же следовала запрошенным изменениям по форме и направлению. Резким переключением полного набора рефлекторных параметров с решения для быстрой ходьбы на решение для медленного бега также получались плавные переходы между ходьбой и бегом без дополнительных правил высшего уровня по таймингу.
Что это означает для нашего понимания движения
Исследование не утверждает, что реальные люди опираются только на рефлексы; наша нервная система также использует ритмогенерирующие цепи, сенсоры равновесия и команды мозга. Но эти симуляции демонстрируют, что теоретически тщательно настроенные и модулируемые рефлексы сами по себе могут контролировать скорость и поддерживать переходы между типами походки в реалистичном теле. Это указывает на то, что спинальные механизмы обратной связи могут нести большую часть работы повседневного движения, чем считалось ранее, освобождая высшие центры мозга для планирования и принятия решений. Результаты также указывают на более простые и надёжные стратегии управления для шагающих роботов и протезов, которые опираются на рефлексоподобную обратную связь вместо сложных центральных контроллеров.
Цитирование: Bunz, E.K., Bruel, A.J., Ijspeert, A.J. et al. Modulating reflexes enables speed control in simulated human walking and running. Sci Rep 16, 13028 (2026). https://doi.org/10.1038/s41598-026-48509-z
Ключевые слова: человеческое локомоция, спинальные рефлексы, скорость шага, нейромышечно-скелетное моделирование, переход от ходьбы к бегу