Clear Sky Science · de
Modulation von Reflexen ermöglicht Geschwindigkeitskontrolle beim simulierten menschlichen Gehen und Laufen
Warum das für unsere Bewegung wichtig ist
Im Alltag wechseln wir oft fließend das Tempo: gemächliches Schlendern, Beschleunigen, um einen Bus zu erwischen, langsames Joggen oder ein sprintartiger Übergang ins Laufen. Selten denken wir darüber nach, was unser Nervensystem leisten muss, damit diese Wechsel glatt ablaufen, ohne dass wir stolpern. Diese Studie nutzt detaillierte Computersimulationen von Körper und Rückenmark, um eine einfache, aber grundlegende Frage zu stellen: Können schnelle, automatische Rückkopplungsschleifen im Rückenmark — unsere Reflexe — allein den Großteil dieser Geschwindigkeitssteuerung übernehmen und sogar beim Wechsel zwischen Gehen und Laufen helfen?
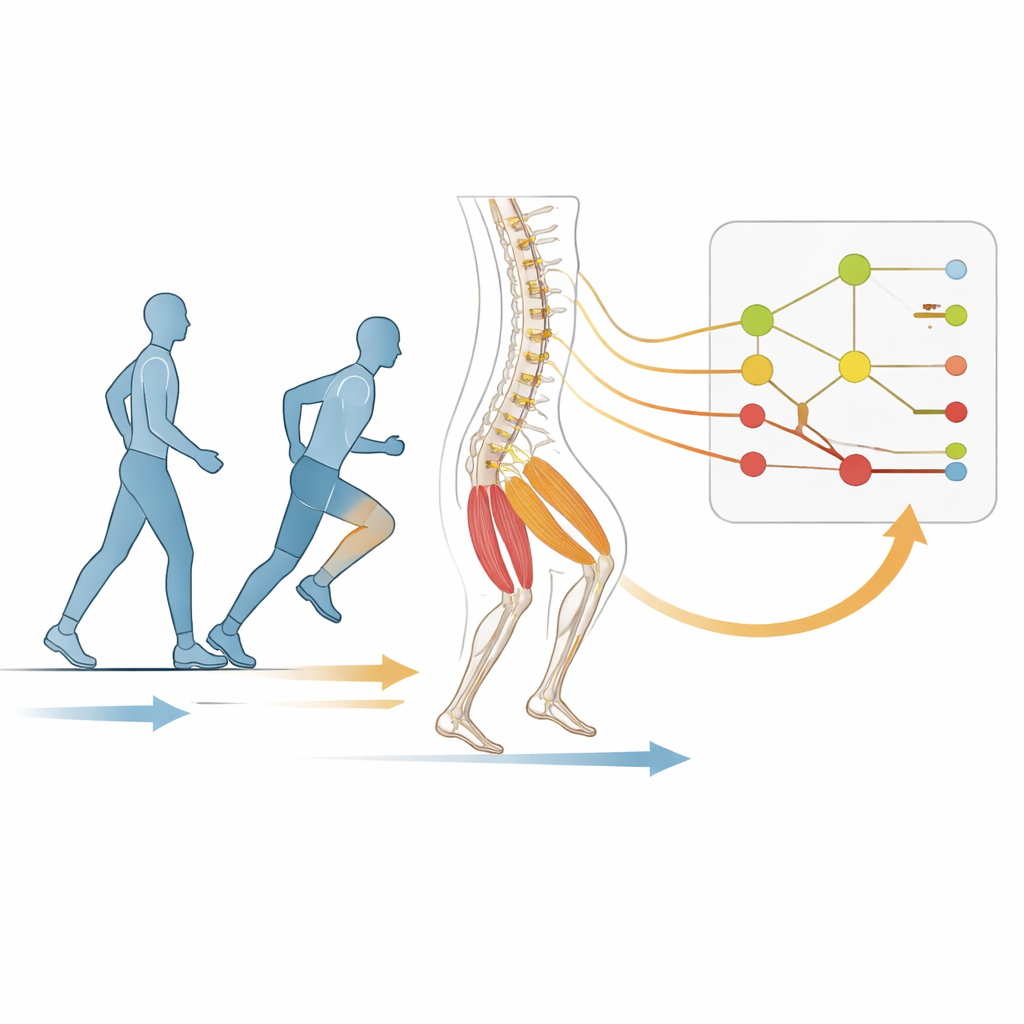
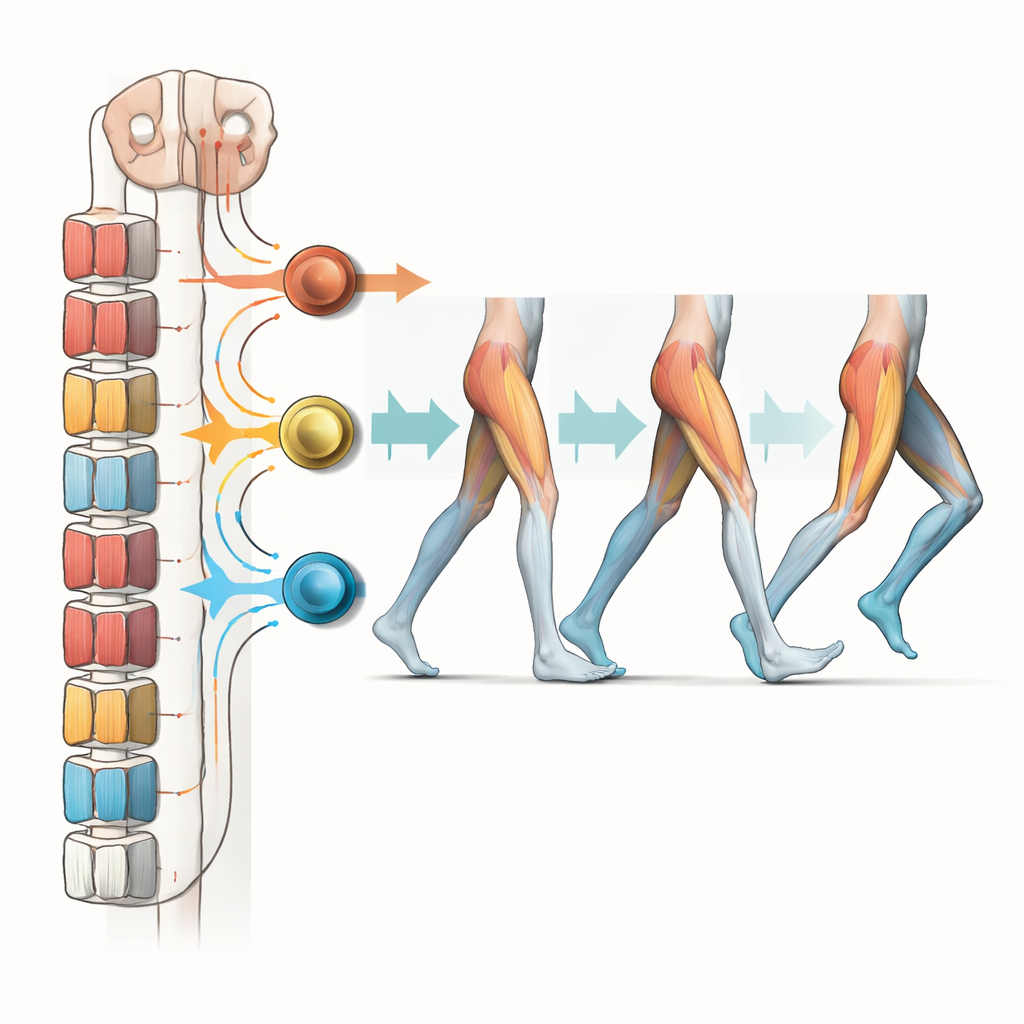
Blick ins körpereigene „Autopilot“-System
Beim Gehen oder Laufen steuert das Gehirn nicht jede einzelne Muskelfaser im Detail. Stattdessen enthält das Rückenmark Schaltkreise, die die Muskelaktivität automatisch an Signale von Muskeln und Sehnen anpassen. Diese Reflexe reagieren auf Länge und Kraft der Muskeln und tragen dazu bei, dass wir aufrecht und in Bewegung bleiben. Weitere Schaltkreise, sogenannte zentrale Mustererzeuger, können rhythmische Aktivität selbstständig erzeugen, und höhere Hirnzentren liefern Planung und Feinanpassung. Weil all diese Systeme beim Menschen eng miteinander verknüpft sind, ist es im Labor praktisch unmöglich, Reflexe isoliert zu testen. Die Autoren nutzen daher ein neuromuskuloskeletales Computermodell: einen physikbasierten virtuellen Menschen mit Knochen, Gelenken und neun wichtigen Beinmuskeln pro Seite, der ausschließlich durch reflexähnliche Rückkopplung zwischen Muskelpaaren angetrieben wird.
Testen, was Reflexe allein leisten können
Im Modell nimmt jeder Reflexweg Muskeldehnung oder -kraft auf und sendet ein erregendes oder hemmendes Signal zurück an denselben oder einen antagonistischen Muskel, skaliert durch einen Verstärkungsfaktor und verschoben durch einen Offset. Insgesamt gibt es 71 solcher einstellbarer Größen. Das Team suchte zunächst nach Kombinationen dieser Werte, die stabile Geh- und Laufmuster bei sehr langsamen und sehr schnellen Geschwindigkeiten erzeugen. Sie fanden, dass sich durch nur die Veränderung dieser Reflexverstärkungen und Offsets das Modell konstant zwischen etwa 0,45 m/s und 1,93 m/s gehen und zwischen 2,0 m/s und 3,4 m/s laufen ließ — ein Bereich, der typische menschliche Gehgeschwindigkeiten abdeckt und in realistische Laufgeschwindigkeiten vieler Menschen reicht. Auffällig war, dass die Grenzgeschwindigkeiten für Gehen und Laufen nahe der üblichen menschlichen Übergangsgeschwindigkeit vom Gehen zum Laufen lagen, obwohl dies nicht ausdrücklich ins Modell eingebaut worden war.
Von vielen Stellschrauben zu einer fokussierten Kontrollstrategie
Obwohl 71 Parameter verfügbar sind, wollten die Autoren wissen, ob das Nervensystem wirklich alle anpassen müsste, um die Geschwindigkeit zu steuern. Sie analysierten viele erfolgreiche Geh- und Lauflösungen und fragten, welche Reflexwege sich über die Geschwindigkeiten hinweg am stärksten veränderten. Mit einer statistischen Methode identifizierten sie eine kleinere Gruppe „schlüsselmäßiger“ Reflexe, deren Verstärkungen den größten Teil der geschwindigkeitsbezogenen Variation trugen. Bemerkenswerterweise blieb durch die Erlaubnis, nur 30 dieser Schlüsselparameter zu variieren, nahezu der volle Bereich erreichbarer Geh- und Laufgeschwindigkeiten erhalten. Die Forscher passten dann einfache mathematische Kurven an, die jede Schlüsselfeinstellung mit der Gesamttempo des Modells verbanden. So entstand eine kompakte Geschwindigkeitsmodulationsfunktion: gewünschte Geschwindigkeit eingeben, und sie liefert einen vollständigen Satz von Reflexverstärkungen und Offsets für den Regler.
Geschwindigkeit unterwegs ändern und Gangart wechseln
Als Nächstes prüfte das Team, ob sich diese Geschwindigkeitsmodulationsfunktion auf zwei Arten nutzen lässt. Im „Offline“-Modus wählten sie eine Zielgeschwindigkeit vor der Simulation, erzeugten anhand der Funktion Reflexparameter und führten dann die Simulation aus. Im „Online“-Modus änderten sie die Zielgeschwindigkeit während der Simulation und aktualisierten die Reflexparameter kontinuierlich, während die virtuelle Person bereits ging oder lief. In beiden Modi passte das Modell seine Geschwindigkeit über einen beträchtlichen Bereich glatt an, insbesondere beim Laufen, wo Soll- und Ist-Geschwindigkeit sehr gut übereinstimmten. Beim Gehen war die Übereinstimmung weniger perfekt, folgte aber dennoch den geforderten Änderungen in Form und Richtung. Durch abruptes Umschalten des vollständigen Parametersatzes von einer schnellen Geh- auf eine langsame Lauf-Lösung erzeugten sie außerdem glatte Übergänge zwischen Gehen und Laufen, ganz ohne zusätzliche hochrangige Timing-Regeln.
Was das für unser Verständnis von Bewegung bedeutet
Die Studie behauptet nicht, dass echte Menschen sich ausschließlich auf Reflexe verlassen; unser Nervensystem nutzt zusätzlich rhythmuserzeugende Schaltkreise, Gleichgewichtssensoren und Hirnbefehle. Aber die Simulationen zeigen prinzipiell, dass sorgfältig abgestimmte und modulierte Reflexe allein Tempo steuern und Gangartwechsel in einem realistischen Körper unterstützen können. Das legt nahe, dass spinale Rückkopplung mehr zur Alltagsbewegung beitragen könnte, als bisher angenommen, und höhere Hirnzentren so mehr Raum für Planung und Entscheidungsfindung behalten. Die Ergebnisse weisen außerdem auf einfachere, robustere Steuerstrategien für Laufroboter und Prothesen hin, die stärker auf reflexähnliche Rückkopplung statt auf komplexe zentrale Regelungen setzen.
Zitation: Bunz, E.K., Bruel, A.J., Ijspeert, A.J. et al. Modulating reflexes enables speed control in simulated human walking and running. Sci Rep 16, 13028 (2026). https://doi.org/10.1038/s41598-026-48509-z
Schlüsselwörter: menschliche Fortbewegung, spinale Reflexe, Ganggeschwindigkeit, neuromuskuloskeletale Modellierung, Übergang vom Gehen zum Laufen