Clear Sky Science · zh
YOLO-LSBA:一种用于检测小型樱桃番茄果梗的高精度模型
为什么更智能的番茄采摘很重要
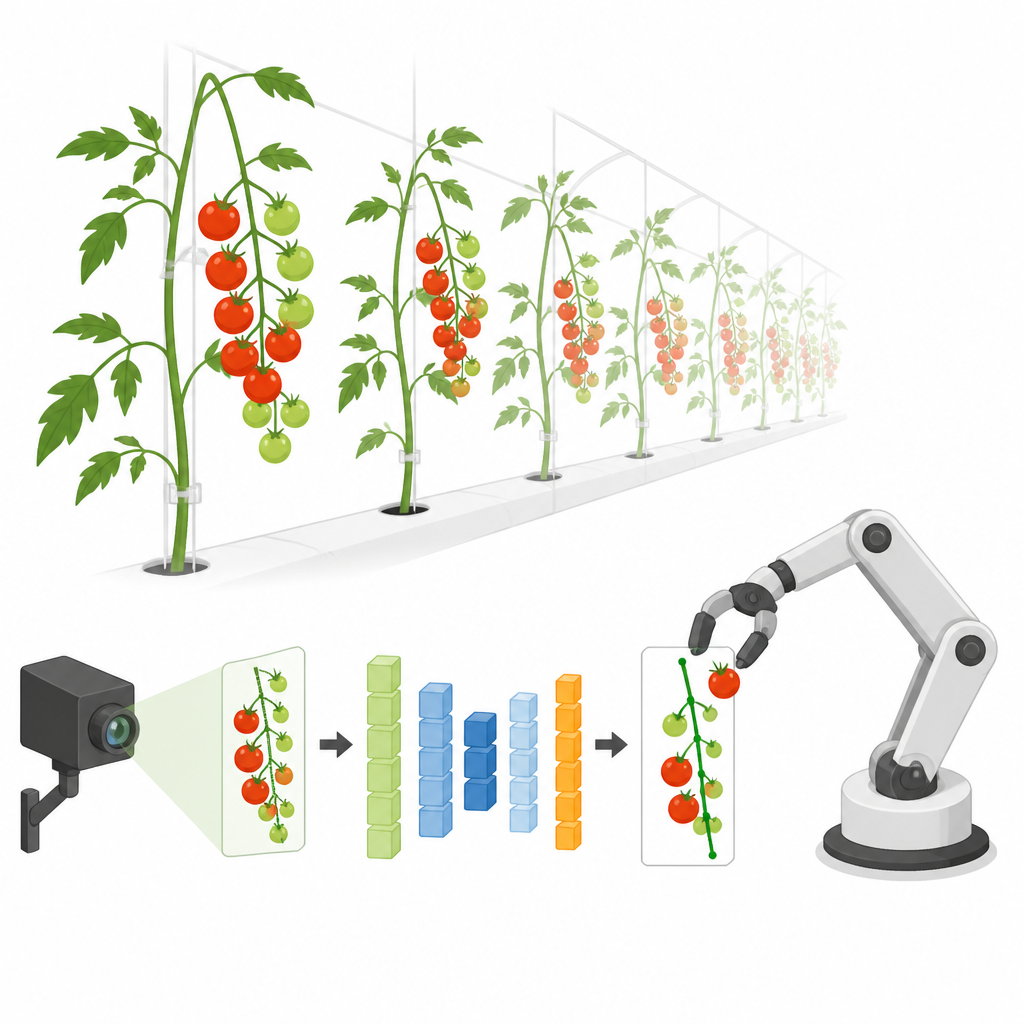
樱桃番茄美味,但自动采摘却出人意料地困难。人工采摘者能看清纤细的果梗与藤茎的连接处并干净地剪下,而机器人在叶片、枝条和变化的光照中很难识别这一微小目标。本研究提出了一种新的计算机视觉模型,帮助机器人准确快速地识别这些细小果梗,从而使完全自动化的樱桃番茄采摘在现代农场中更为可行。
看清微小果梗的挑战
在温室中,樱桃番茄的果串朝向各异、相互重叠,并处于斑驳的阳光或阴影下。现有的大多数采摘视觉系统侧重于检测果实本身——它们相对较大、圆而有色彩。果梗则细小、部分被遮挡,并容易与邻近的枝条混淆。然而,正是这些果梗决定了机器人应在哪里以及如何切割,以便摘下成熟果实而不致挫伤果肉或撕伤植株。作者认为,可靠的果梗检测是从识别番茄到用机械臂实际采摘之间的关键环节。
在有限数据上构建更丰富的样本
研究人员从中国北方某温室收集了 3,000 张番茄植株图片,这些图片在不同光照条件和角度下拍摄。他们将每个番茄标注为成熟、未成熟或果梗,然后使用数据增强技术将数据集扩充了四倍多。通过随机翻转、裁剪、增亮、减暗和加入视觉噪声,他们生成了超过 12,000 张模拟真实世界变化的图像。这个更丰富的集合帮助模型学习即便在暗淡、部分遮挡或复杂背景下果梗的外观特征。
为细小结构调优的视觉模型
工作的核心是一种改进版的流行实时检测器 YOLO。新模型名为 YOLO-LSBA,专为诸如番茄果梗这样的细小精细结构进行调优。改进的一部分让网络在保持细节跟踪的同时“观测”更广的图像区域,从而提升将果梗与叶片和支撑物区分开的能力。另一部分重组了图像宽高方向以及颜色通道之间的信息流,去除冗余信号,使模型更关注微弱、类似果梗的模式。第三个组件则谨慎地在不同尺度上融合特征,防止大果实产生的强信号淹没细薄果梗的微弱特征。

将模型付诸测试
团队进行了大量实验以评估每个新组件对果梗检测的贡献。他们发现,升级后的架构在保持模型对常用于农用机器的小型计算设备友好轻量的同时,显著提高了果梗识别的精度。在基准测试中,YOLO-LSBA 在果梗这一难检类别上优于若干知名检测模型,包括其他轻量级 YOLO 版本以及传统系统如 SSD 和 Faster R-CNN。作者随后将模型部署在树莓派单板计算机和温室现场试验中,模型能跟随视频输入并在果实重叠或光照不良时准确标注果梗。
对未来农用机器人的意义
简单来说,该研究表明机器人可以被训练到几乎像细心的人工采摘者一样可靠地“看见”樱桃番茄脆弱的果梗,并能在有限硬件上实现。YOLO-LSBA 在果梗检测上约达 97% 的精度,同时运行速度足以支持实时应用。这为能够接近每个果串、找到最安全切割点并干净温和地摘取果实的收割机器人铺平了道路。作者也指出,还需更多样化的田间数据和长期试验,但他们的方法为更智能的采摘系统提供了切实可行的蓝图,不仅适用于番茄,也适用于其他簇生作物。
引用: Liu, Q., Chen, F., Zhang, H. et al. YOLO-LSBA: A high-precision model for detecting stems of small-sized cherry tomatoes. Sci Rep 16, 15552 (2026). https://doi.org/10.1038/s41598-026-46348-6
关键词: 樱桃番茄采收, 果梗检测, 农业机器人, 计算机视觉, YOLO 模型