Clear Sky Science · it
YOLO-LSBA: un modello ad alta precisione per rilevare i piccioli dei pomodorini
Perché una raccolta più intelligente dei pomodori conta
I pomodorini sono gustosi ma sorprendentemente difficili da raccogliere automaticamente. I raccoglitori umani riescono a vedere dove i delicati piccioli collegano ogni frutto alla pianta e a tagliarli con precisione, ma i robot faticano con questo bersaglio minuscolo, nascosto tra foglie, rami e condizioni di luce variabili. Questo studio presenta un nuovo modello di visione artificiale che aiuta i robot a individuare quei sottili piccioli in modo accurato e rapido, rendendo la raccolta completamente automatizzata dei pomodorini più realistica per le aziende agricole moderne.
La sfida di vedere i piccioli minuti
Nei vivai e nelle serre, i grappoli di pomodorini pendono in direzioni diverse, si sovrappongono e stanno alla luce del sole o all’ombra a macchie. La maggior parte dei sistemi di visione per la raccolta si concentra sul rilevamento dei frutti stessi, che sono relativamente grandi, rotondi e colorati. I piccioli, invece, sono sottili, parzialmente nascosti e facilmente confondibili con i rami vicini. Eppure quei piccioli determinano dove e come un robot deve tagliare per rimuovere i frutti maturi senza ammaccarli o danneggiare la pianta. Gli autori sostengono che un rilevamento affidabile dei piccioli sia il collegamento mancante tra il riconoscere i pomodori e il raccoglierli effettivamente con un braccio robotico.
Costruire un quadro più ricco a partire da dati limitati
I ricercatori sono partiti da 3.000 immagini di piante di pomodoro scattate in una serra nel nord della Cina, acquisite in molte condizioni di illuminazione e da angolazioni diverse. Hanno etichettato ogni pomodoro come maturo, immaturo o picciolo e poi hanno usato tecniche di aumento dei dati per espandere il dataset oltre quattro volte. Ruotando casualmente, ritagliando, schiarendo, scurendo e aggiungendo rumore visivo, hanno creato più di 12.000 immagini che imitano le variazioni del mondo reale. Questa raccolta più ricca aiuta il modello a imparare come appaiono i piccioli anche quando sono fiocchi, parzialmente nascosti o circondati da sfondi fuorvianti.
Un modello di visione ottimizzato per i piccoli dettagli
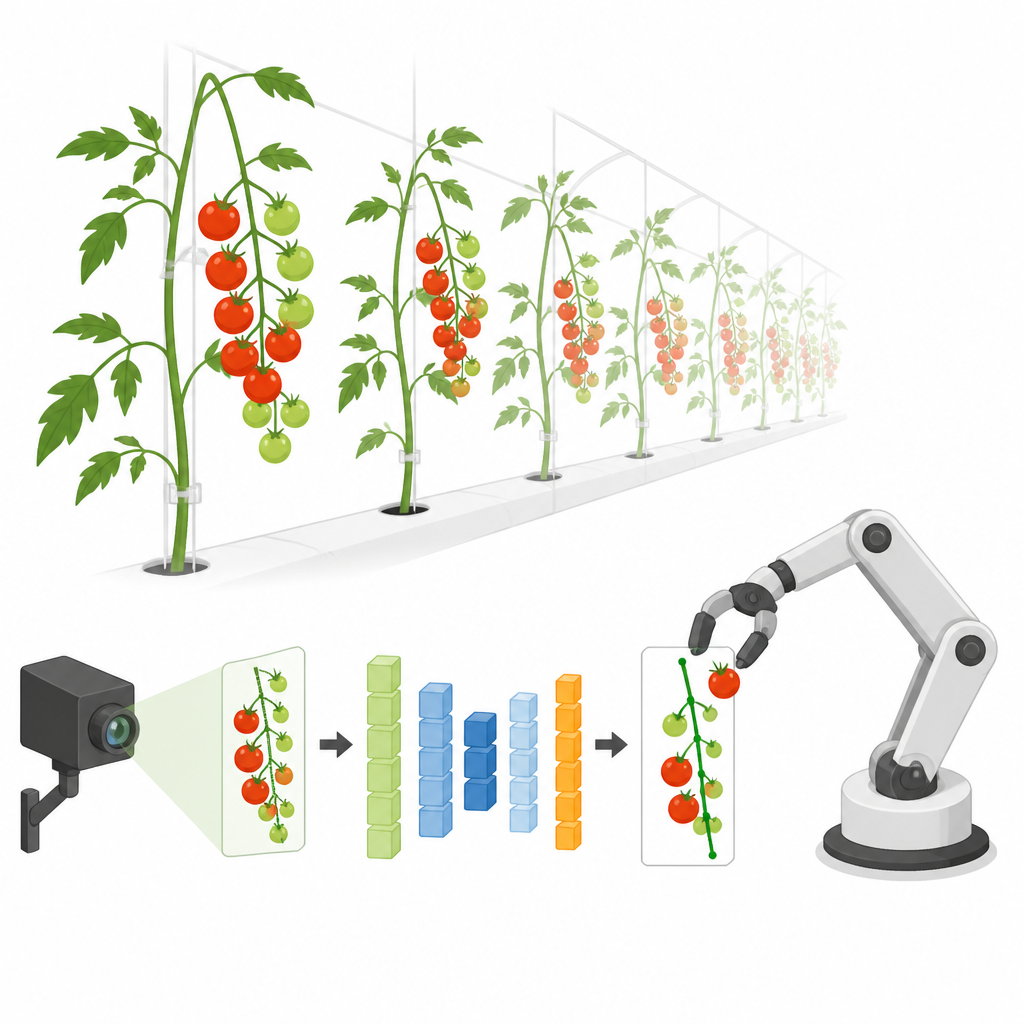
Al centro del lavoro c’è una versione migliorata di un noto rilevatore in tempo reale noto come YOLO. Il nuovo modello, chiamato YOLO-LSBA, è ottimizzato specificamente per strutture piccole e fini come i piccioli dei pomodori. Una parte dell’aggiornamento aiuta la rete a “guardare” su un’area più ampia dell’immagine pur mantenendo i dettagli fini, il che migliora la sua capacità di separare i piccioli da foglie e supporti. Un’altra parte riorganizza il modo in cui le informazioni scorrono sulla larghezza e l’altezza dell’immagine e tra i canali di colore, eliminando segnali ridondanti in modo che il modello presti più attenzione a pattern sottili simili a piccioli. Un terzo componente combina con cura le caratteristiche a diverse scale, prevenendo che i segnali forti dei frutti grandi soffochino le deboli firme dei piccioli sottili.

Mettere il modello alla prova
Il team ha condotto esperimenti estesi per valutare come ciascun nuovo componente contribuisse al rilevamento dei piccioli. Hanno scoperto che l’architettura migliorata aumentava significativamente la precisione del riconoscimento dei piccioli mantenendo il modello sufficientemente leggero per i piccoli computer spesso usati sui robot agricoli. Nei test di riferimento, YOLO-LSBA ha superato diversi modelli di rilevamento noti, incluse altre versioni compatte di YOLO e sistemi tradizionali come SSD e Faster R-CNN, specialmente per la difficile categoria dei piccioli. Gli autori hanno poi distribuito il modello su un single-board computer Raspberry Pi e in prove sul campo in serra, dove ha processato flussi video e ha segnato i piccioli con precisione anche quando i frutti si sovrapponevano o la luce era scarsa.
Cosa significa per i robot agricoli futuri
In termini semplici, lo studio mostra che i robot possono essere addestrati a “vedere” i fragili piccioli dei pomodorini quasi con la stessa affidabilità di un raccoglitore umano attento, e farlo su hardware modesto. Il modello YOLO-LSBA raggiunge circa il 97 percento di precisione nel rilevamento dei piccioli pur funzionando abbastanza velocemente per l’uso in tempo reale. Questo apre la strada a robot raccoglitori in grado di avvicinarsi a ogni grappolo, trovare il punto di taglio più sicuro e rimuovere i frutti in modo pulito e delicato. Pur riconoscendo che sono necessari dati di campo più vari e test a lungo termine, gli autori offrono un progetto pratico per sistemi di raccolta più intelligenti non solo per i pomodori ma anche per altre colture a grappolo.
Citazione: Liu, Q., Chen, F., Zhang, H. et al. YOLO-LSBA: A high-precision model for detecting stems of small-sized cherry tomatoes. Sci Rep 16, 15552 (2026). https://doi.org/10.1038/s41598-026-46348-6
Parole chiave: raccolta pomodorini, rilevamento piccioli della frutta, robotica agricola, computer vision, modello YOLO