Clear Sky Science · ja
YOLO-LSBA:小型チェリートマトの茎検出のための高精度モデル
なぜ賢いトマト摘みが重要か
チェリートマトは美味しい一方で、自動収穫は意外に難しい。人間の摘み手は繊細な茎が果実をつるにどうつないでいるかを見てきれいに切ることができるが、ロボットは葉や枝、変化する光の中に隠れたこの小さな標的に苦戦する。本研究は、ロボットがこれら細い茎を正確かつ迅速に見つけられるようにする新しいコンピュータビジョンモデルを示し、現代の農場でのチェリートマトの完全自動収穫をより現実的にする。
小さな茎を認識する課題
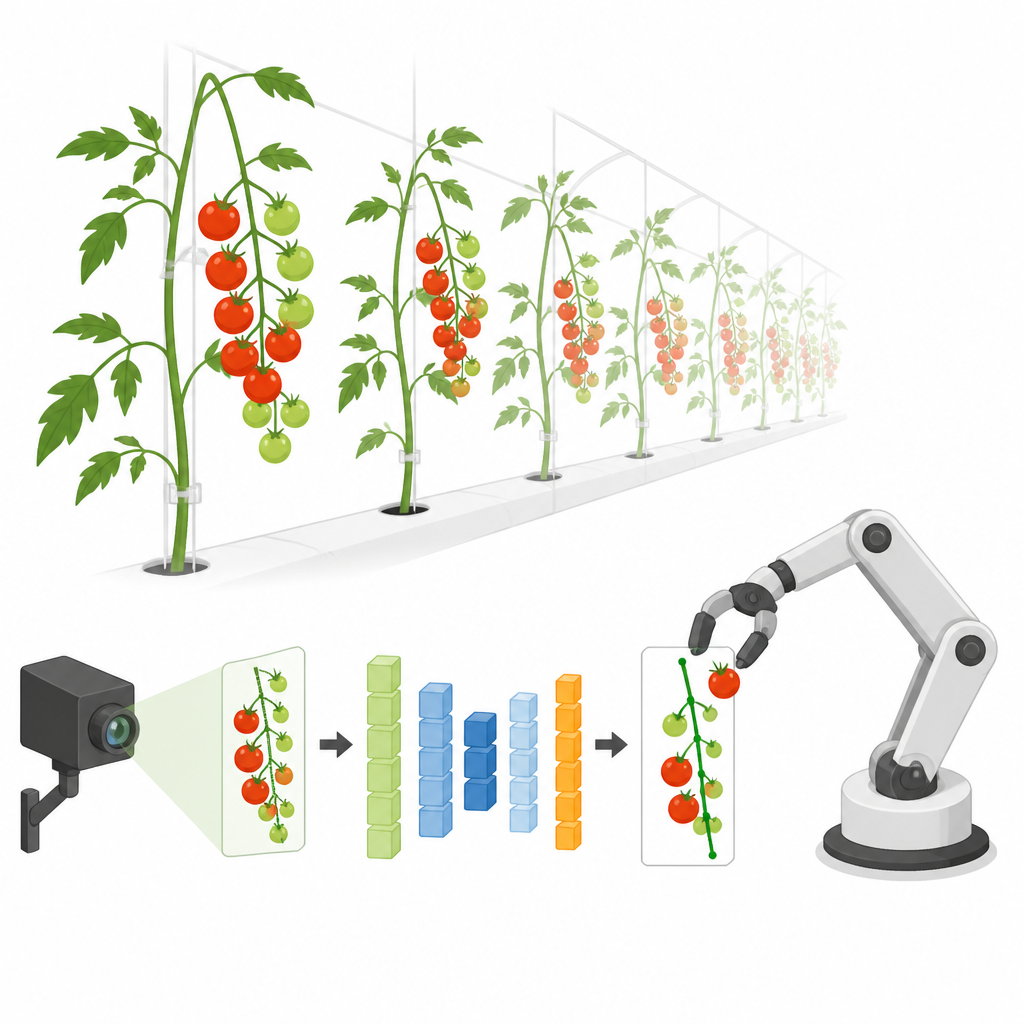
温室ではチェリートマトの房がさまざまな方向に垂れ、互いに重なり、斑のある日陰や日向に置かれる。既存の多くの収穫用ビジョンシステムは、比較的大きく丸く色鮮やかな果実自体の検出に注力している。一方で茎は細く一部が隠れており、近くの枝と簡単に紛らわされる。しかし茎こそがロボットがどこでどのように切るべきかを決め、果実を傷つけたり植物を引き裂いたりせずに摘み取るためのポイントになる。著者らは、信頼できる茎検出こそがトマトを認識することとロボットアームで実際に摘むことをつなぐ欠けた部分だと主張する。
限られたデータから豊かな表現を構築する
研究チームは北中国の温室で撮影した3,000枚のトマト植物画像から始め、さまざまな照明条件や角度が含まれている。それぞれのトマトに対して熟、未熟、茎としてラベル付けを行い、データ拡張技術でデータセットを4倍以上に拡張した。画像のランダムな反転、切り取り、明るさの調整、暗化、視覚ノイズの付加により、実世界の変動を模した12,000枚以上の画像を生成した。この豊富なコレクションにより、茎が暗く一部が隠れている場合や紛らわしい背景に囲まれている場合でも、モデルは茎の見た目を学習しやすくなる。
細部に特化した改良ビジョンモデル
本研究の中核は、リアルタイム検出器として広く使われるYOLOの改良版である。新しいモデルYOLO-LSBAは、トマトの茎のような小さく細い構造に特化してチューニングされている。改良の一つは、微細なディテールを保持しつつ画像のより広い領域を“見る”ことを助け、茎と葉や支えを分離する能力を向上させる。別の改良は、画像の幅や高さ、色チャネル間で情報が流れる方法を再編成し、冗長な信号を削り取ることで、モデルが茎らしい微妙なパターンにより注意を払うようにする。第三の要素は異なるスケールの特徴を慎重に組み合わせ、大きな果実の強い信号が細い茎の弱い特徴をかき消すのを防ぐ。

モデルの実地検証
チームは各新規コンポーネントが茎検出にどのように寄与するかを確かめるために広範な実験を行った。その結果、改良されたアーキテクチャは茎認識の精度を大幅に向上させつつ、農場ロボットでよく用いられる小型コンピュータでも動作するほど軽量なままであることがわかった。ベンチマークテストでは、YOLO-LSBAは他のコンパクトなYOLO系やSSD、Faster R-CNNなどの従来手法を含む複数の既知検出モデルを上回り、特に困難な茎カテゴリで優れた性能を示した。著者らはそのモデルをRaspberry Piのようなシングルボードコンピュータや温室の実地試験に展開し、映像入力に追従しながら果実が重なったり照明が悪かったりする場合でも茎を正確にマーキングできることを確認した。
今後の農業ロボットにとっての意義
簡潔に言えば、この研究はロボットが慎重な人間の摘み手とほぼ同等にチェリートマトの繊細な茎を“見る”ように訓練でき、しかも控えめなハードウェアでそれを実行できることを示している。YOLO-LSBAは茎検出で約97パーセントの精度を達成しつつ、実時間利用に十分な速度で動作する。これにより、収穫ロボットが各房に近づき、最も安全な切断点を見つけて果実をきれいかつ丁寧に取り除く道筋が開かれる。著者らは、より多様な現場データと長期試験が依然として必要であると述べているが、本アプローチはトマトだけでなく他の房状作物にも応用できる、実用的な賢い摘み取りシステムの設計図を提供する。
引用: Liu, Q., Chen, F., Zhang, H. et al. YOLO-LSBA: A high-precision model for detecting stems of small-sized cherry tomatoes. Sci Rep 16, 15552 (2026). https://doi.org/10.1038/s41598-026-46348-6
キーワード: チェリートマト収穫, 果実茎検出, 農業ロボティクス, コンピュータビジョン, YOLOモデル