Clear Sky Science · pl
YOLO-LSBA: Model o wysokiej precyzji do wykrywania łodyg małych pomidorków koktajlowych
Dlaczego inteligentniejsze zbieranie pomidorów ma znaczenie
Pomidorki koktajlowe są pyszne, ale zaskakująco trudne do zautomatyzowanego zbierania. Ludzie potrafią dostrzec, gdzie delikatne łodygi łączą owoc z pędem i odciąć je czysto, natomiast roboty mają problem z tym małym celem ukrytym między liśćmi, gałązkami i zmiennym światłem. W tym badaniu przedstawiono nowy model widzenia komputerowego, który pomaga robotom precyzyjnie i szybko wykrywać te cienkie łodygi, czyniąc w pełni zautomatyzowane zbieranie pomidorków koktajlowych bardziej realnym dla nowoczesnych gospodarstw.
Wyzwanie widzenia drobnych łodyg
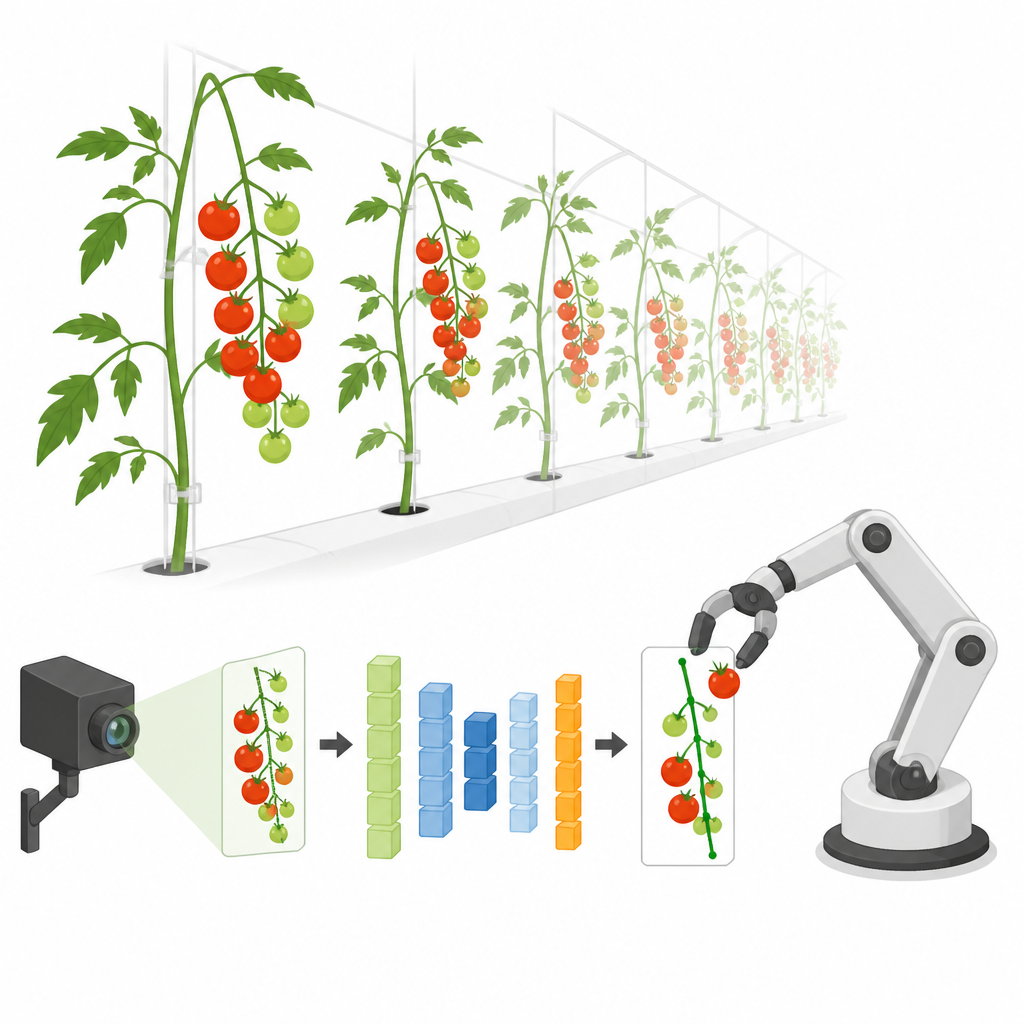
W szklarniach kiście pomidorków zwisają w różnych kierunkach, nachodzą na siebie i znajdują się na plamach słońca lub w cieniu. Większość istniejących systemów wizyjnych do zbiorów skupia się na wykrywaniu samych owoców, które są stosunkowo duże, okrągłe i kolorowe. Łodygi są jednak cienkie, częściowo ukryte i łatwo je pomylić z pobliskimi gałązkami. To właśnie łodygi decydują, gdzie i jak robot powinien ciąć, aby usunąć dojrzałe owoce bez ich tłuczenia czy uszkadzania rośliny. Autorzy twierdzą, że niezawodne wykrywanie łodyg jest brakującym ogniwem między rozpoznawaniem pomidorów a rzeczywistym zbieraniem ich przez ramię robotyczne.
Budowanie bogatszego obrazu z ograniczonych danych
Badacze zaczęli od 3000 zdjęć roślin pomidorów ze szklarni w północnych Chinach, wykonanych w różnych warunkach oświetleniowych i pod różnymi kątami. Oznaczyli każdy pomidor jako dojrzały, niedojrzały lub jako łodygę, a następnie zastosowali techniki augmentacji danych, aby powiększyć zbiór danych ponad czterokrotnie. Przez losowe odwracanie, przycinanie, rozjaśnianie, przyciemnianie i dodawanie szumów wizualnych stworzyli ponad 12 000 obrazów imitujących rzeczywiste wariacje. Ta rozszerzona kolekcja pomaga modelowi nauczyć się, jak wyglądają łodygi nawet gdy są przygasłe, częściowo ukryte lub otoczone mylącym tłem.
Dopasowany model widzenia do drobnych detali
Rdzeniem pracy jest ulepszona wersja popularnego detektora czasu rzeczywistego znanego jako YOLO. Nowy model, nazwany YOLO-LSBA, jest dostrojony specjalnie do małych, drobnych struktur, takich jak łodygi pomidorów. Jedien element aktualizacji pomaga sieci „patrzeć” na szerszy obszar obrazu, jednocześnie zachowując śledzenie drobnych szczegółów, co poprawia zdolność rozróżniania łodyg od liści i podpór. Inny element reorganizuje przepływ informacji wzdłuż szerokości i wysokości obrazu oraz między kanałami kolorów, usuwając redundantne sygnały, aby model skupiał się bardziej na subtelnych, łodygom podobnych wzorcach. Trzeci składnik ostrożnie łączy cechy na różnych skalach, zapobiegając tłumieniu słabych sygnałów cienkich łodyg przez silne sygnały dużych owoców.

Testy modelu
Zespół przeprowadził obszerne eksperymenty, aby sprawdzić, jak każdy nowy składnik przyczynia się do wykrywania łodyg. Stwierdzili, że ulepszona architektura znacząco poprawiła precyzję rozpoznawania łodyg, jednocześnie utrzymując model na tyle lekkim, by działał na małych komputerach często używanych w robotach rolniczych. W testach porównawczych YOLO-LSBA osiągnął lepsze wyniki niż kilka znanych modeli detekcji, w tym inne kompaktowe wersje YOLO oraz tradycyjne systemy takie jak SSD i Faster R-CNN, zwłaszcza w trudnej kategorii łodyg. Autorzy wdrożyli następnie model na komputerze jednopłytkowym Raspberry Pi i przeprowadzili próby polowe w szklarni, gdzie model nadążał za strumieniem wideo i dokładnie oznaczał łodygi nawet przy nakładających się owocach czy słabym oświetleniu.
Co to oznacza dla przyszłych robotów rolniczych
Mówiąc prosto, badanie pokazuje, że roboty można nauczyć „widzieć” delikatne łodygi pomidorków koktajlowych niemal tak niezawodnie jak uważny człowiek zbierający owoce, i robić to na skromnym sprzęcie. Model YOLO-LSBA osiąga około 97 procent precyzji w wykrywaniu łodyg, jednocześnie pracując wystarczająco szybko do zastosowań w czasie rzeczywistym. Otwiera to drogę dla robotów zbierających, które mogą podejść do każdej kiści, znaleźć najbezpieczniejszy punkt cięcia i usunąć owoce czysto i delikatnie. Choć autorzy zauważają, że potrzebne są bardziej zróżnicowane dane polowe i długoterminowe testy, ich podejście stanowi praktyczny plan dla inteligentniejszych systemów zbierających nie tylko pomidory, ale też inne uprawy rosnące w kiściach.
Cytowanie: Liu, Q., Chen, F., Zhang, H. et al. YOLO-LSBA: A high-precision model for detecting stems of small-sized cherry tomatoes. Sci Rep 16, 15552 (2026). https://doi.org/10.1038/s41598-026-46348-6
Słowa kluczowe: zbiór pomidorków koktajlowych, wykrywanie łodyg owoców, robotyka rolnicza, widzenie komputerowe, model YOLO