Clear Sky Science · ru
YOLO-LSBA: высокоточная модель для обнаружения стеблей мелких черри-помидоров
Почему умный сбор томатов важен
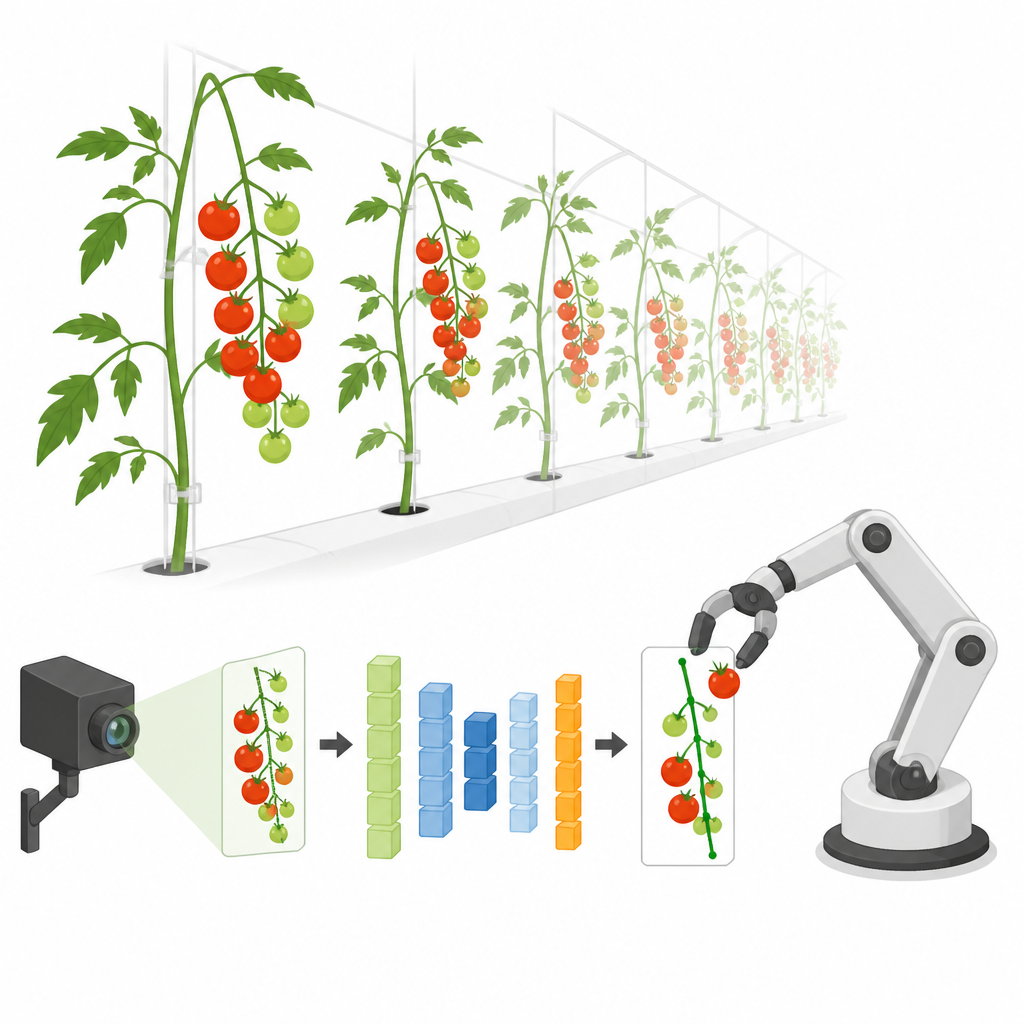
Черри-помидоры вкусны, но удивительно сложны для автоматического сбора. Люди-установщики видят, где тонкие стебли соединяют каждый плод с лозой, и аккуратно их срезают, а роботы испытывают трудности с этой маленькой целью, скрытой среди листьев, ветвей и меняющегося освещения. В этом исследовании представлена новая модель компьютерного зрения, которая помогает роботам точно и быстро находить эти тонкие стебли, делая полностью автоматический сбор черри-помидоров более реалистичным для современных ферм.
Проблема видимости тонких стеблей
В теплицах гроздья черри-помидоров свисают в разных направлениях, перекрывают друг друга и находятся в пятнистом солнце или тени. Большинство существующих систем зрения для сбора концентрируются на обнаружении самих плодов, которые относительно крупные, круглые и яркие. Стебли, однако, тонкие, частично скрыты и легко путаются с соседними ветвями. Между тем именно стебли определяют, где и как робот должен резать, чтобы снять спелые плоды без повреждений и разрывов растения. Авторы утверждают, что надёжное обнаружение стеблей — недостающая связь между распознаванием помидоров и их фактическим сбором манипулятором робота.
Построение более полного набора данных из ограниченного материала
Исследователи начали с 3000 изображений томатных растений из теплицы на севере Китая, снятых при различных условиях освещения и с разных углов. Они помечали каждый помидор как спелый, неспелый или стебель, а затем использовали методы увеличения данных, чтобы расширить набор более чем в четыре раза. Путём случайного отражения, обрезки, осветления, затемнения и добавления визуального шума они создали свыше 12 000 изображений, имитирующих реальные вариации. Эта более богатая коллекция помогает модели научиться распознавать стебли даже когда те тусклые, частично скрыты или окружены отвлекающим фоном.
Доработанная модель зрения для мелких деталей
В основе работы лежит улучшенная версия популярного детектора в реальном времени, известного как YOLO. Новая модель, названная YOLO-LSBA, настроена специально для мелких тонких структур, таких как томатные стебли. Одна часть улучшений помогает сети «смотреть» на более широкую область изображения, сохраняя при этом отслеживание тонких деталей, что повышает её способность отделять стебли от листьев и опор. Другая часть реорганизует поток информации по ширине и высоте изображения и между цветовыми каналами, устраняя избыточные сигналы, чтобы модель уделяла больше внимания тонким, похожим на стебли, паттернам. Третий компонент аккуратно комбинирует признаки на разных масштабах, не позволяя сильным сигналам от крупных плодов заглушать слабые следы тонких стеблей.

Испытания модели
Команда провела обширные эксперименты, чтобы оценить вклад каждого нового компонента в обнаружение стеблей. Они обнаружили, что обновлённая архитектура существенно улучшает точность распознавания стеблей при сохранении лёгкости модели, достаточной для небольших компьютеров, часто используемых на фермерских роботах. В эталонных тестах YOLO-LSBA превзошла несколько известных моделей обнаружения, включая другие компактные версии YOLO и традиционные системы, такие как SSD и Faster R-CNN, особенно в сложной категории стеблей. Авторы затем развернули модель на одноплатном компьютере Raspberry Pi и провели полевые испытания в теплице, где модель работала в режиме видео и точно отмечала стебли даже при наложении плодов и плохом освещении.
Что это означает для будущих фермерских роботов
Проще говоря, исследование показывает, что роботов можно обучить «видеть» хрупкие стебли черри-помидоров почти с той же надёжностью, что и внимательный человек-сборщик, и делать это на скромном железе. Модель YOLO-LSBA достигает около 97 процентов точности в обнаружении стеблей, оставаясь при этом достаточно быстрой для использования в реальном времени. Это прокладывает путь для роботов-сборщиков, которые смогут подойти к каждой грозди, найти наиболее безопасную точку среза и аккуратно удалить плоды. Авторы отмечают, что нужны более разнообразные полевые данные и долгосрочные испытания, но их подход предлагает практическую схему для более умных систем сбора не только для томатов, но и для других урожайных культур с гроздьями.
Цитирование: Liu, Q., Chen, F., Zhang, H. et al. YOLO-LSBA: A high-precision model for detecting stems of small-sized cherry tomatoes. Sci Rep 16, 15552 (2026). https://doi.org/10.1038/s41598-026-46348-6
Ключевые слова: сбор черри-помидоров, обнаружение стеблей фруктов, сельскохозяйственная робототехника, компьютерное зрение, модель YOLO