Clear Sky Science · es
YOLO-LSBA: un modelo de alta precisión para detectar tallos de tomates cherry de pequeño tamaño
Por qué importa una recolección de tomates más inteligente
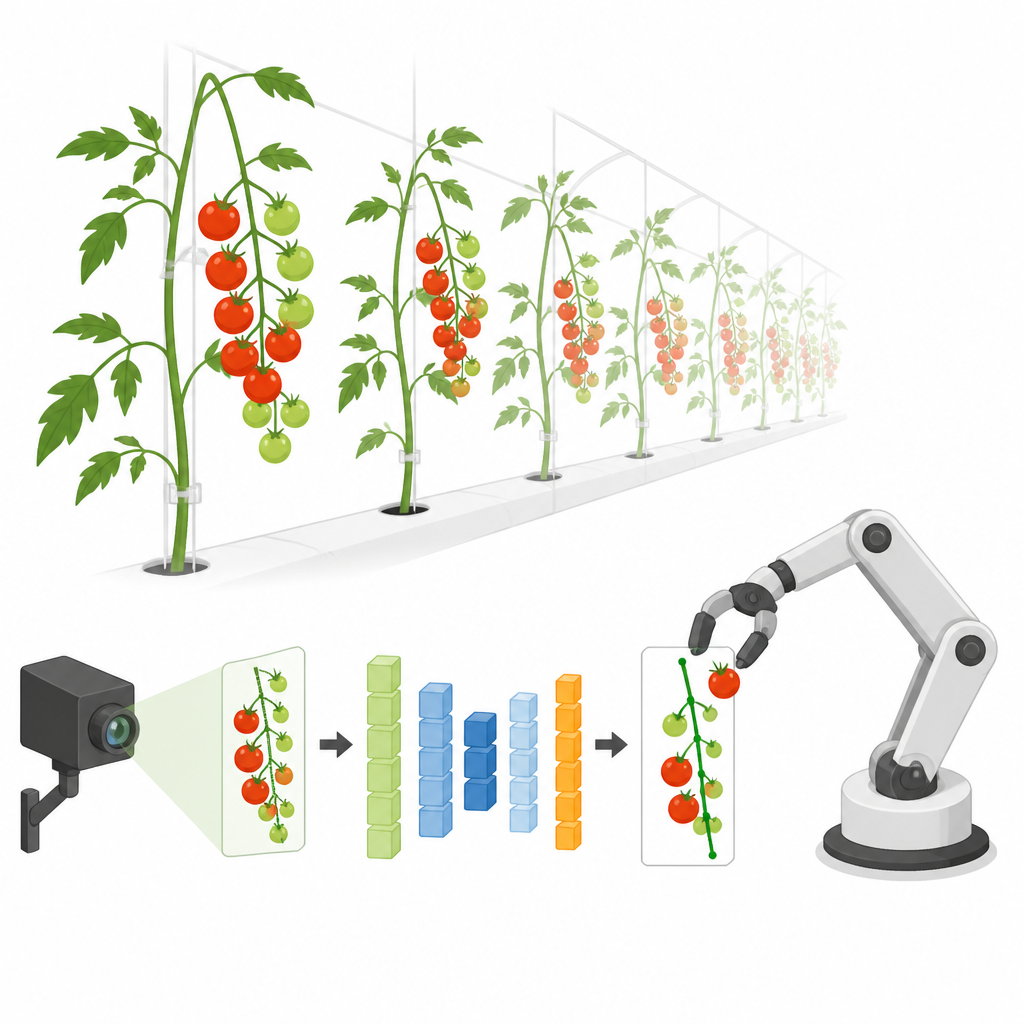
Los tomates cherry son sabrosos pero sorprendentemente difíciles de cosechar de forma automática. Los recolectores humanos pueden ver dónde los delicados tallos conectan cada fruto con la planta y cortarlos limpiamente, pero los robots tienen problemas con este objetivo diminuto escondido entre hojas, ramas y cambios de iluminación. Este estudio presenta un nuevo modelo de visión por computadora que ayuda a los robots a localizar esos finos tallos con precisión y rapidez, haciendo más realista la recolección totalmente automatizada de tomates cherry en las explotaciones modernas.
El desafío de ver tallos minúsculos
En invernaderos, los racimos de tomates cherry cuelgan en distintas direcciones, se solapan entre sí y se encuentran en zonas de sol o sombra irregulares. La mayoría de los sistemas de visión existentes para la cosecha se centran en detectar los propios frutos, que son relativamente grandes, redondos y coloridos. Los tallos, sin embargo, son finos, parcialmente ocultos y fácilmente confundibles con ramas cercanas. No obstante, esos tallos determinan dónde y cómo debe cortar un robot para arrancar los frutos maduros sin magullarlos ni dañar la planta. Los autores sostienen que la detección fiable de tallos es el eslabón que falta entre reconocer tomates y cosecharlos realmente con un brazo robótico.
Construyendo una imagen más rica a partir de datos limitados
Los investigadores partieron de 3.000 imágenes de plantas de tomate tomadas en un invernadero del norte de China, capturadas bajo múltiples condiciones de iluminación y desde diferentes ángulos. Etiquetaron cada tomate como maduro, inmaduro o tallo, y luego usaron técnicas de aumento de datos para ampliar el conjunto más de cuatro veces. Mediante volteos aleatorios, recortes, aclarados, oscurecimientos y la adición de ruido visual, crearon más de 12.000 imágenes que imitan variaciones del mundo real. Esta colección más amplia ayuda al modelo a aprender cómo se ven los tallos incluso cuando están poco iluminados, parcialmente ocultos o rodeados de fondos confusos.
Un modelo de visión afinado para pequeños detalles
En el núcleo del trabajo está una versión mejorada de un detector en tiempo real popular conocido como YOLO. El nuevo modelo, llamado YOLO-LSBA, está afinado específicamente para estructuras pequeñas y finas como los tallos de tomate. Una parte de la mejora ayuda a la red a “mirar” sobre un área más amplia de la imagen sin perder el seguimiento de los detalles finos, lo que mejora su capacidad para separar tallos de hojas y soportes. Otra parte reorganiza cómo fluye la información a lo largo del ancho y la altura de la imagen y entre canales de color, recortando señales redundantes para que el modelo preste más atención a patrones sutiles tipo tallo. Un tercer componente combina cuidadosamente características a diferentes escalas, evitando que las señales fuertes de los frutos grandes enmascaren las firmas tenues de los tallos delgados.

Poniendo el modelo a prueba
El equipo realizó experimentos exhaustivos para ver cómo cada nuevo componente contribuía a la detección de tallos. Encontraron que la arquitectura mejorada incrementó significativamente la precisión del reconocimiento de tallos al tiempo que mantenía el modelo lo bastante ligero para los pequeños ordenadores que a menudo se usan en robots agrícolas. En pruebas de referencia, YOLO-LSBA superó a varios modelos de detección bien conocidos, incluidas otras versiones compactas de YOLO y sistemas tradicionales como SSD y Faster R-CNN, especialmente en la difícil categoría de tallos. Los autores desplegaron luego el modelo en un ordenador de placa única Raspberry Pi y en ensayos de campo en invernadero, donde procesó entradas de vídeo en tiempo real y marcó tallos con precisión incluso cuando los frutos se solapaban o la iluminación era pobre.
Qué significa esto para los futuros robots agrícolas
En términos sencillos, el estudio muestra que los robots pueden entrenarse para “ver” los frágiles tallos de los tomates cherry casi con la misma fiabilidad que un recolector humano cuidadoso, y hacerlo con hardware modesto. El modelo YOLO-LSBA alcanza alrededor del 97 por ciento de precisión en la detección de tallos y sigue siendo lo bastante rápido para uso en tiempo real. Esto allana el camino para robots de cosecha que pueden acercarse a cada racimo, encontrar el punto de corte más seguro y retirar los frutos de forma limpia y delicada. Aunque los autores señalan que aún hacen falta datos de campo más variados y pruebas a largo plazo, su enfoque ofrece un plano práctico para sistemas de recolección más inteligentes no solo para tomates sino también para otros cultivos agrupados.
Cita: Liu, Q., Chen, F., Zhang, H. et al. YOLO-LSBA: A high-precision model for detecting stems of small-sized cherry tomatoes. Sci Rep 16, 15552 (2026). https://doi.org/10.1038/s41598-026-46348-6
Palabras clave: cosecha de tomates cherry, detección de tallos de fruto, robótica agrícola, visión por computadora, modelo YOLO