Clear Sky Science · sv
YOLO-LSBA: En högprecisionsmodell för att upptäcka stjälkar på små körsbärstomater
Varför smartare tomatplockning spelar roll
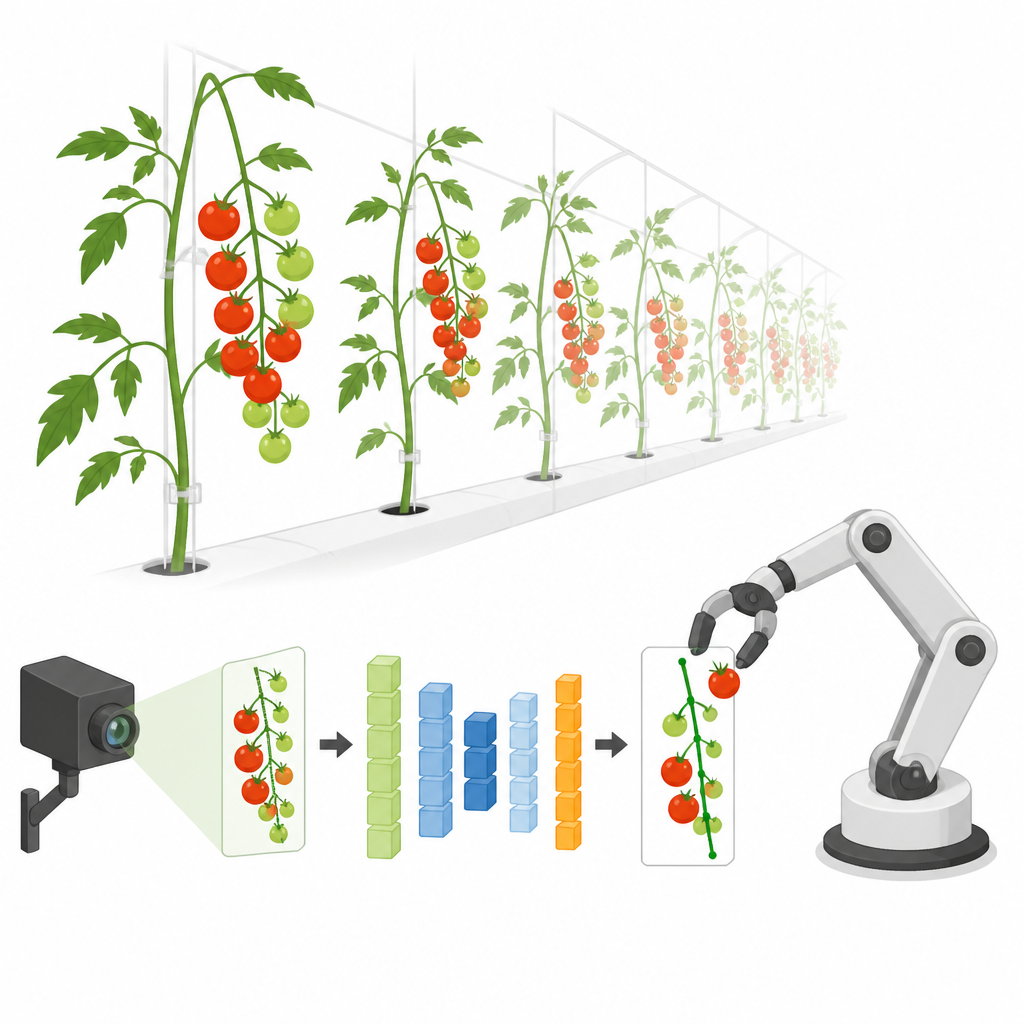
Körsbärstomater är goda men överraskande svåra att skörda automatiskt. Mänskliga plockare kan se var de sköra stjälkarna förbinder varje frukt med rankan och klipper dem rent, men robotar har problem med detta lilla mål som döljer sig bland blad, grenar och skiftande ljus. I denna studie presenteras en ny datorseendemodell som hjälper robotar att upptäcka dessa tunna stjälkar både exakt och snabbt, vilket gör fullständigt automatiserad skörd av körsbärstomater mer realistisk för moderna gårdar.
Utmaningen att se små stjälkar
I växthus hänger körsbärstomatsklasar i olika riktningar, överlappar varandra och befinner sig i fläckvis sol eller skugga. De flesta befintliga visionssystem för skörd fokuserar på att upptäcka själva frukterna, som är relativt stora, runda och färggranna. Stjälkarna däremot är tunna, delvis dolda och lätt att förväxla med närliggande grenar. Ändå avgör dessa stjälkar var och hur en robot bör klippa för att ta bort mogna frukter utan att skada dem eller riva i plantan. Författarna menar att pålitlig stjälkdetektion är den saknade länken mellan att känna igen tomater och att faktiskt plocka dem med en robotarm.
Bygga en rikare bild från begränsade data
Forskarna började med 3 000 bilder av tomatplantor från ett växthus i norra Kina, tagna under många ljusförhållanden och från olika vinklar. De märkte upp varje tomat som mogen, omogen eller stjälk och använde därefter dataaugmenteringstekniker för att multiplicera datasetet med mer än fyra gånger. Genom att slumpmässigt spegla, beskära, ljusa upp, mörka ner och lägga till visuellt brus skapade de över 12 000 bilder som efterliknar verkliga variationer. Denna rikare samling hjälper modellen att lära sig hur stjälkar ser ut även när de är svaga, delvis dolda eller omgivna av förvillande bakgrunder.
En finslipad visionsmodell för små detaljer
I kärnan av arbetet finns en förbättrad version av en populär realtidsdetektor känd som YOLO. Den nya modellen, kallad YOLO-LSBA, är särskilt anpassad för små, fina strukturer som tomatstjälkar. En del av uppgraderingen hjälper nätverket att "se" över ett större område av bilden samtidigt som det behåller finare detaljer, vilket förbättrar dess förmåga att särskilja stjälkar från blad och stöder. En annan del omorganiserar hur information flödar över bildens bredd och höjd och mellan färgkanaler, och tar bort redundanta signaler så att modellen fäster mer uppmärksamhet vid subtila, stjälkliknande mönster. En tredje komponent kombinerar försiktigt funktioner i olika skalor, vilket förhindrar att starka signaler från stora frukter dränker de svaga signaturerna från tunna stjälkar.

Sätta modellen på prov
Teamet genomförde omfattande experiment för att se hur varje ny komponent bidrog till stjälkdetektionen. De fann att den uppgraderade arkitekturen väsentligt förbättrade precisionen i stjälkigenkänningen samtidigt som modellen förblev tillräckligt lätt för små datorer som ofta används på gårdsrobotar. På referenstester överträffade YOLO-LSBA flera välkända detektionsmodeller, inklusive andra kompakta YOLO-versioner och traditionella system som SSD och Faster R-CNN, särskilt för den svåra stjälkkategorin. Författarna implementerade sedan modellen på en Raspberry Pi-enkelkortsdator och i fältprov i växthus, där den hängde med videoinmatningen och noggrant markerade stjälkar även när frukter överlappade eller ljuset var dåligt.
Vad detta betyder för framtidens gårdsrobotar
Enkelt uttryckt visar studien att robotar kan tränas att "se" de sköra stjälkarna på körsbärstomater nästan lika tillförlitligt som en noggrann mänsklig plockare, och att göra det på modest hårdvara. YOLO-LSBA-modellen når omkring 97 procent precision i stjälkdetektion samtidigt som den fortfarande körs tillräckligt snabbt för realtidsbruk. Detta banar väg för skördrobotar som kan närma sig varje tomatklase, hitta den säkraste klippunkten och ta bort frukterna rent och försiktigt. Även om författarna påpekar att mer varierade fältdatapunkter och långsiktiga tester fortfarande behövs, erbjuder deras angreppssätt en praktisk ritning för smartare plocksystem inte bara för tomater utan också för andra klasformade grödor.
Citering: Liu, Q., Chen, F., Zhang, H. et al. YOLO-LSBA: A high-precision model for detecting stems of small-sized cherry tomatoes. Sci Rep 16, 15552 (2026). https://doi.org/10.1038/s41598-026-46348-6
Nyckelord: skörd av körsbärstomater, upptäckt av fruktstjälkar, jordbruksrobotik, datorseende, YOLO-modell