Clear Sky Science · pt
YOLO-LSBA: Um modelo de alta precisão para detectar os caules de tomates-cereja de pequeno porte
Por que colher tomates com mais inteligência importa
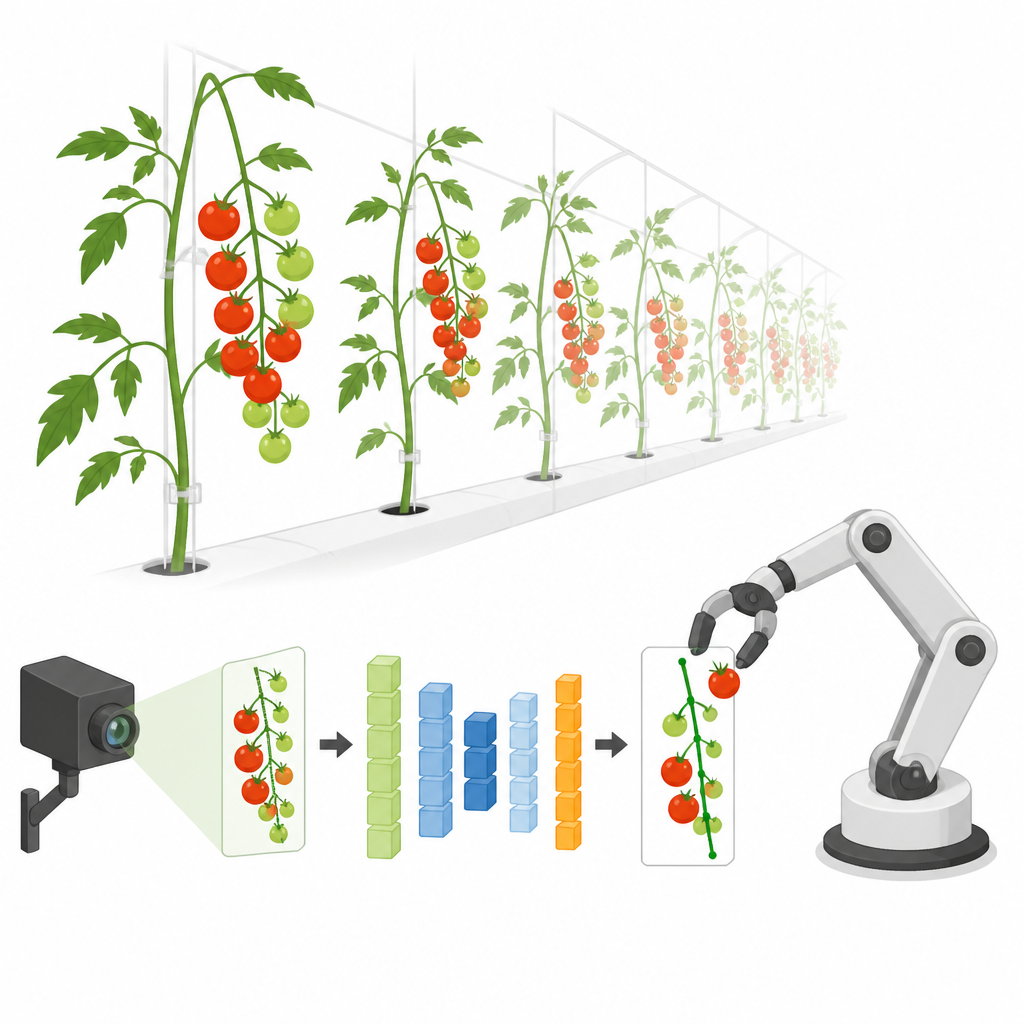
Tomates-cereja são saborosos, mas surpreendentemente difíceis de colher automaticamente. Colhedores humanos conseguem ver onde os delicados caules conectam cada fruto ao ramo e cortá-los com precisão, mas robôs têm dificuldade com esse alvo minúsculo, escondido entre folhas, galhos e variações de luz. Este estudo apresenta um novo modelo de visão computacional que ajuda robôs a identificar esses caules finos com precisão e rapidez, tornando a colheita totalmente automatizada de tomates-cereja mais factível para fazendas modernas.
O desafio de enxergar caules minúsculos
Em estufas, cachos de tomate-cereja pendem em direções diferentes, se sobrepõem e ficam em áreas de sol ou sombra irregulares. A maioria dos sistemas de visão existentes para colheita foca em detectar os frutos, que são relativamente grandes, redondos e coloridos. Os caules, porém, são finos, parcialmente ocultos e facilmente confundidos com galhos próximos. Ainda assim, esses caules determinam onde e como um robô deve cortar para remover frutos maduros sem machucá-los ou danificar a planta. Os autores argumentam que a detecção confiável de caules é o elo que falta entre reconhecer tomates e realmente colhê-los com um braço robótico.
Construindo um retrato mais rico a partir de dados limitados
Os pesquisadores partiram de 3.000 imagens de plantas de tomate de uma estufa no norte da China, capturadas sob diversas condições de iluminação e ângulos. Eles rotularam cada tomate como maduro, imaturo ou caule e então usaram técnicas de aumento de dados para expandir o conjunto em mais de quatro vezes. Ao aplicar flips aleatórios, recortes, clareamento, escurecimento e adicionar ruído visual, criaram mais de 12.000 imagens que simulam variações do mundo real. Essa coleção mais rica ajuda o modelo a aprender como os caules aparecem mesmo quando estão fracos, parcialmente ocultos ou cercados por fundos confusos.
Um modelo de visão ajustado para pequenos detalhes
No núcleo do trabalho está uma versão aprimorada de um detector em tempo real popular conhecido como YOLO. O novo modelo, chamado YOLO-LSBA, foi ajustado especificamente para estruturas pequenas e finas como os caules de tomate. Uma parte da melhoria ajuda a rede a "olhar" por uma área mais ampla da imagem mantendo o acompanhamento dos detalhes finos, o que melhora sua capacidade de separar caules de folhas e suportes. Outra parte reorganiza como a informação flui ao longo da largura e altura da imagem e entre canais de cor, eliminando sinais redundantes para que o modelo foque mais em padrões sutis semelhantes a caules. Um terceiro componente combina cuidadosamente características em diferentes escalas, evitando que sinais fortes de frutos grandes abafem as assinaturas tênues dos caules finos.

Colocando o modelo à prova
A equipe realizou experimentos extensivos para avaliar como cada novo componente contribuiu para a detecção de caules. Eles descobriram que a arquitetura aprimorada melhorou significativamente a precisão do reconhecimento de caules, mantendo o modelo leve o suficiente para computadores pequenos frequentemente usados em robôs agrícolas. Em testes de referência, o YOLO-LSBA superou vários modelos de detecção conhecidos, incluindo outras versões compactas do YOLO e sistemas tradicionais como SSD e Faster R-CNN, especialmente na difícil categoria dos caules. Os autores então implementaram o modelo em um computador de placa única Raspberry Pi e em testes de campo na estufa, onde ele acompanhou o fluxo de vídeo e marcou caules com precisão mesmo quando os frutos se sobrepunham ou a iluminação era fraca.
O que isso significa para futuros robôs agrícolas
Em termos simples, o estudo mostra que robôs podem ser treinados para "ver" os frágeis caules de tomates-cereja quase tão confiavelmente quanto um colhedor humano cuidadoso, e fazê-lo em hardware modesto. O modelo YOLO-LSBA alcança cerca de 97% de precisão na detecção de caules enquanto ainda roda rápido o suficiente para uso em tempo real. Isso abre caminho para robôs de colheita que podem se aproximar de cada cacho, encontrar o ponto de corte mais seguro e remover frutos de forma limpa e delicada. Embora os autores ressaltem que são necessários dados de campo mais variados e testes de longo prazo, a abordagem oferece um roteiro prático para sistemas de colheita mais inteligentes, não apenas para tomates, mas também para outras culturas em cachos.
Citação: Liu, Q., Chen, F., Zhang, H. et al. YOLO-LSBA: A high-precision model for detecting stems of small-sized cherry tomatoes. Sci Rep 16, 15552 (2026). https://doi.org/10.1038/s41598-026-46348-6
Palavras-chave: colheita de tomate-cereja, detecção de caule de fruto, robótica agrícola, visão computacional, modelo YOLO