Clear Sky Science · ar
YOLO-LSBA: نموذج عالي الدقة لاكتشاف سيقان طماطم الكرز صغيرة الحجم
لماذا يهم تحسين قطف الطماطم
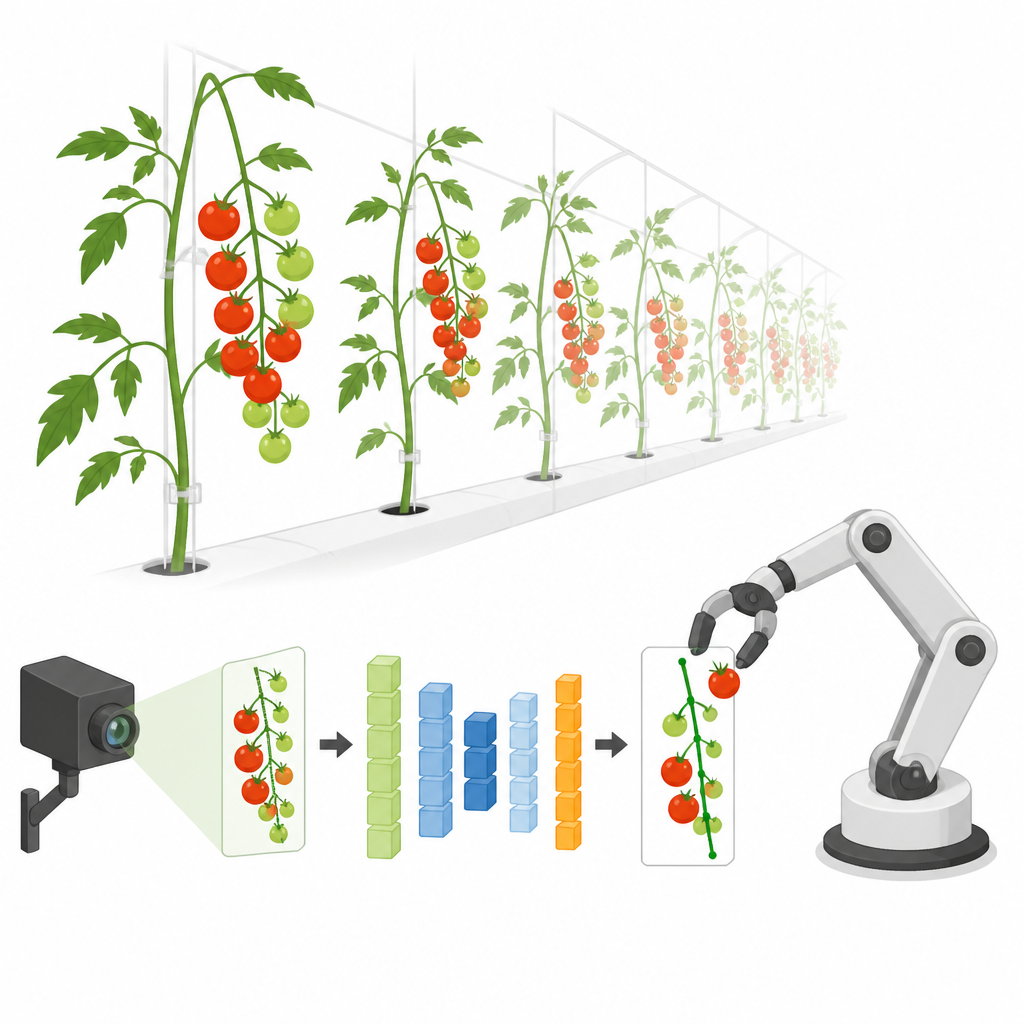
طماطم الكرز لذيذة لكنها مندهشة بصعوبتها في الحصاد الأوتوماتيكي. يستطيع البشر رؤية مكان اتصال السيقان الرقيقة بكل ثمرة إلى الكرمة وقطعها نظيفًا، لكن الروبوتات تواجه صعوبة في استهداف هذا الهدف الصغير المخفي بين الأوراق والفروع وتحت تغيّر الإضاءة. تقدم هذه الدراسة نموذج رؤية حاسوبية جديدًا يساعد الروبوتات على رصد تلك السيقان الدقيقة بدقة وسرعة، مما يجعل القطف الآلي الكامل لطماطم الكرز أكثر واقعية للمزارع الحديثة.
تحدي رؤية السيقان الدقيقة
في البيوت المحمية، تتدلى عناقيد طماطم الكزر في اتجاهات مختلفة، وتتداخل مع بعضها، وتقع في بقع من الشمس أو الظل. تركز معظم أنظمة الرؤية الحالية للحصاد على اكتشاف الثمار نفسها، التي تكون كبيرة نسبيًا ومستديرة وملونة. أما السيقان فرفيعة ومخفية جزئيًا ويسهل الخلط بينها وبين الفروع القريبة. ومع ذلك، تحدد تلك السيقان مكان وكيفية قطع الروبوت بحيث يزيل الثمار الناضجة دون كدمات أو تمزيق للنبات. يجادل المؤلفون بأن اكتشاف السيقان الموثوق به هو الحلقة المفقودة بين التعرف على الطماطم والقطف الفعلي بذراع روبوتية.
بناء صورة أغنى من بيانات محدودة
بدأ الباحثون بـ 3000 صورة لنباتات الطماطم من بيت محمي في شمال الصين، التقطت في ظروف إضاءة وزوايا مختلفة. صنفوا كل طماطم على أنها ناضجة أو غير ناضجة أو ساق، ثم استخدموا تقنيات زيادة البيانات لتوسيع مجموعة البيانات بأكثر من أربعة أضعاف. من خلال قلب الصور عشوائيًا، واقتصاصها، وتفتيحها أو تعتيمها، وإضافة ضوضاء مرئية، أنشأوا أكثر من 12,000 صورة تحاكي التباينات الحقيقية. تساعد هذه المجموعة الأغنى النموذج على تعلم شكل السيقان حتى عندما تكون باهتة أو مخفية جزئيًا أو محاطة بخلفيات مربكة.
نموذج رؤية مخصص للتفاصيل الصغيرة
في صلب العمل نسخة محسّنة من كاشف شهير في الوقت الحقيقي يعرف باسم YOLO. النموذج الجديد، المسمى YOLO-LSBA، مصمم خصيصًا للهياكل الصغيرة والدقيقة مثل سيقان الطماطم. جزء من الترقية يساعد الشبكة على «النظر» عبر مساحة أوسع من الصورة مع الحفاظ على التفاصيل الدقيقة، مما يحسّن قدرتها على فصل السيقان عن الأوراق والدعامات. جزء آخر يعيد تنظيم كيفية تدفق المعلومات عبر عرض وارتفاع الصورة وبين قنوات الألوان، مزيلاً الإشارات الزائدة حتى يركز النموذج على الأنماط الرقيقة الشبيهة بالسيقان. مكوّن ثالث يجمع بعناية الميزات على مقاييس مختلفة، مانعًا الإشارات القوية من الثمار الكبيرة من طمس البصمات الضعيفة للسيقان الرقيقة.

اختبار النموذج
أجرى الفريق تجارب موسعة لمعرفة كيفية مساهمة كل مكوّن جديد في اكتشاف السيقان. وجدوا أن البنية المطوّرة حسّنت بشكل ملحوظ دقة التعرف على السيقان مع استمرار كون النموذج خفيف الوزن بما يكفي لأجهزة الحاسوب الصغيرة المستخدمة عادة على روبوتات المزارع. في اختبارات المعيار، تفوق YOLO-LSBA على عدة نماذج كشف معروفة، بما في ذلك نسخ YOLO المدمجة الأخرى والأنظمة التقليدية مثل SSD وFaster R-CNN، لا سيما لفئة السيقان الصعبة. ثم نشر المؤلفون النموذج على حاسوب صغير من نوع Raspberry Pi وفي تجارب ميدانية داخل البيوت المحمية، حيث تعامل بنجاح مع تدفق الفيديو وعلم السيقان بدقة حتى عند تداخل الثمار أو ضعف الإضاءة.
ما يعنيه هذا لروبوتات المزارع المستقبلية
بعبارة بسيطة، تُظهر الدراسة أن الروبوتات يمكن تدريبها على «رؤية» سيقان طماطم الكرز الرقيقة تقريبًا بنفس موثوقية القاطر البشري الحريص، وأن تفعل ذلك على أجهزة متواضعة. يصل نموذج YOLO-LSBA إلى حوالي 97 بالمئة دقة في اكتشاف السيقان مع استمرار عمله بسرعة كافية للاستخدام في الوقت الحقيقي. يمهد هذا الطريق لروبوتات حصاد قادرة على الاقتراب من كل عنقود طماطم، والعثور على أنسب نقطة قطع، وإزالة الثمار نظيفًا وبهدوء. بينما يشير المؤلفون إلى أن هناك حاجة لبيانات ميدانية أكثر تنوعًا واختبارات طويلة الأمد، فإن نهجهم يقدم مخططًا عمليًا لأنظمة قطف أذكى ليس فقط للطماطم بل لمحاصيل عناقيد أخرى أيضًا.
الاستشهاد: Liu, Q., Chen, F., Zhang, H. et al. YOLO-LSBA: A high-precision model for detecting stems of small-sized cherry tomatoes. Sci Rep 16, 15552 (2026). https://doi.org/10.1038/s41598-026-46348-6
الكلمات المفتاحية: حصاد طماطم الكرز, اكتشاف سيقان الفاكهة, الروبوتات الزراعية, رؤية حاسوبية, نموذج YOLO