Clear Sky Science · zh
基于边缘的分布式框架:实现智能交通中的实时危险检测与道路安全
为何更快的预警能让道路更安全
现代城市正被交通堵塞所困扰,车辆增多也带来更多事故、险情与昂贵的延误。如今的智能交通系统已经利用传感器和云端监控交通,但在突发情况出现时往往反应过慢:车辆紧急制动、车道被堵或雾霾来袭等情况。本文探讨了一种新方法,通过将大量计算能力从远端数据中心下放到路边乃至车载设备,实现对危险的毫秒级发现与预警。
观察道路的新方式
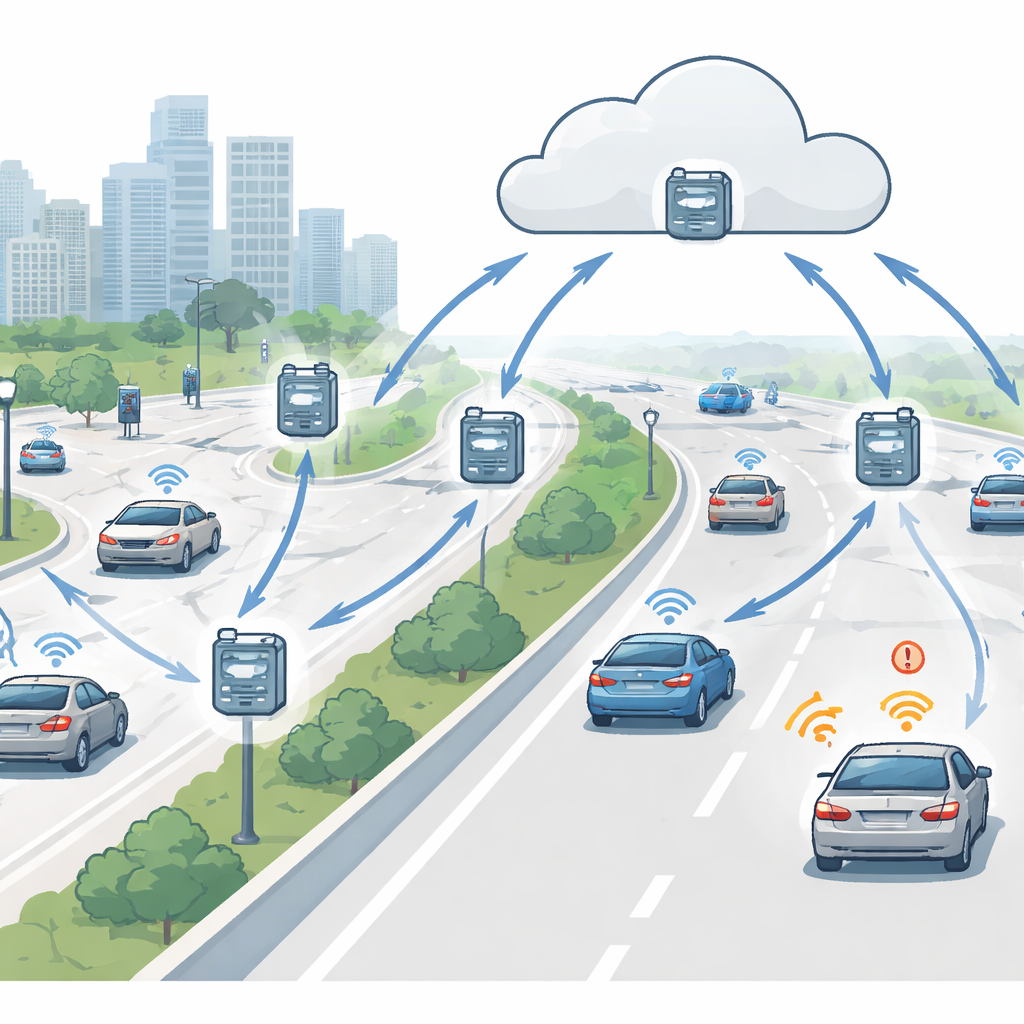
作者提出了一种分布式“边缘”框架,将道路网络的每一部分视为本地“大脑”。不再把所有数据发送到中央云端,路侧传感器、车载设备乃至智能手机采集关于速度、交通密度与天气的信息,并将其发送到附近的边缘节点——位于路口、通信塔或路边单元的小型计算机。这些边缘节点能够快速分析本地状况,判断是否形成危险,并仅把关键洞见传回云端。云端仍然存在,但主要用于长期分析、规划与备份,而不是处理每一次分秒必争的决策。
本地智能如何识别隐患
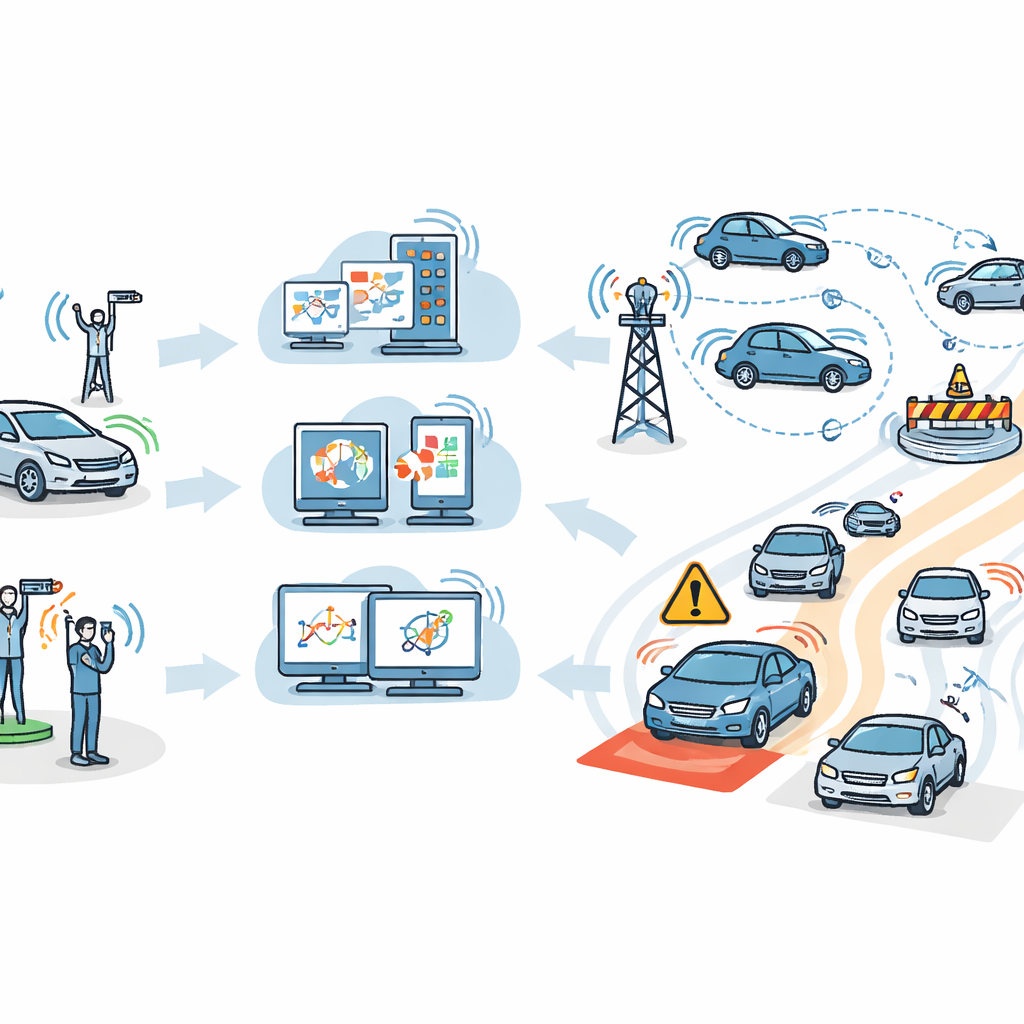
该框架的核心是一个分层决策流程,结合了多种数据分析方法。首先,边缘节点对输入数据进行清洗与对齐,提取车辆速度、加速度模式和本地拥堵等简单特征。接着,一对机器学习模型——随机森林和梯度提升——协同判断这些模式是否具有风险。随后,基于网格的交通模型将道路划分为随时间变化的单元,从而捕捉拥堵或冲击波沿高速公路传播的动态。最后,决策模块在不确定且持续变化的条件下权衡不同响应选项,例如何时以及向多大范围发送警报。
预警如何通过无线网络传播
一旦确认存在危险,系统便利用车联网(V2X)无线连接迅速传播警报。车辆可以直接相互通信,也能与路侧单元及更广泛的网络通信。边缘节点计算出哪些车辆足够接近、存在风险,并触发多跳消息,从一个单元传到另一个单元以覆盖更广区域。这种方法将大部分通信保持在本地和短距离内,从而缩短延迟并减少必须穿过拥挤长链路的数据量。驾驶员通过仪表盘显示或手机应用接收及时提醒;交通管理者则通过云端仪表板获得更广阔的全局视图。
系统测试与验证
为了检验该设计的实际效用,研究人员使用城市出行仿真工具构建了详细的计算机模拟,加入了合成交通以及真实的 GPS 轨迹。他们将基于边缘的框架与完全集中式的云系统以及若干标准调度方法进行对比,这些方法用于决定哪个计算节点处理哪个任务。在城市街道、高速公路、轻重交通和不同天气噪声条件下,他们的系统检测到的危险率高达 95%,警报延迟仅为 0.2 到 0.3 秒——比基于云的基线快约三到五倍。系统还能处理更多每秒任务、在边缘节点间更均衡地分配工作、降低能耗,并在车辆数量与数据量增加时丢包大幅减少。
这对日常出行意味着什么
对非专业读者而言,主要结论很直接:通过将“智能”处理推向数据产生地——路边与车内——交通系统能够更快速、更可靠地应对突发危险。不必再等待远端服务器处理海量数据,本地边缘节点能快速作出信息化决策,并向附近驾驶员发送简明警示。研究表明,这种分布式且通信密集的架构,能够在拥挤的城市与偏远的公路上都提升道路的安全性与弹性,为下一代互联交通提供切实可行的蓝图,从而最终减少事故、让出行更顺畅。
引用: Sahu, D., Prakash, S., Pandey, V.K. et al. Edge based distributed framework for real time hazard detection and road safety in smart transportation. Sci Rep 16, 12232 (2026). https://doi.org/10.1038/s41598-026-42899-w
关键词: 智能交通, 边缘计算, 危险检测, V2X 通信, 道路安全