Clear Sky Science · en
Edge based distributed framework for real time hazard detection and road safety in smart transportation
Why Safer Roads Need Faster Warnings
Modern cities are choking on traffic, and with more vehicles come more crashes, near-misses, and costly delays. Today’s smart transportation systems already use sensors and the cloud to monitor traffic, but they often react too slowly when something suddenly goes wrong: a car brakes hard, a lane is blocked, or fog rolls in. This paper explores a new way to spot such dangers and warn drivers in fractions of a second by moving much of the computing power from distant data centers down to the roadside and even into the vehicles themselves.
A New Way to Watch the Road
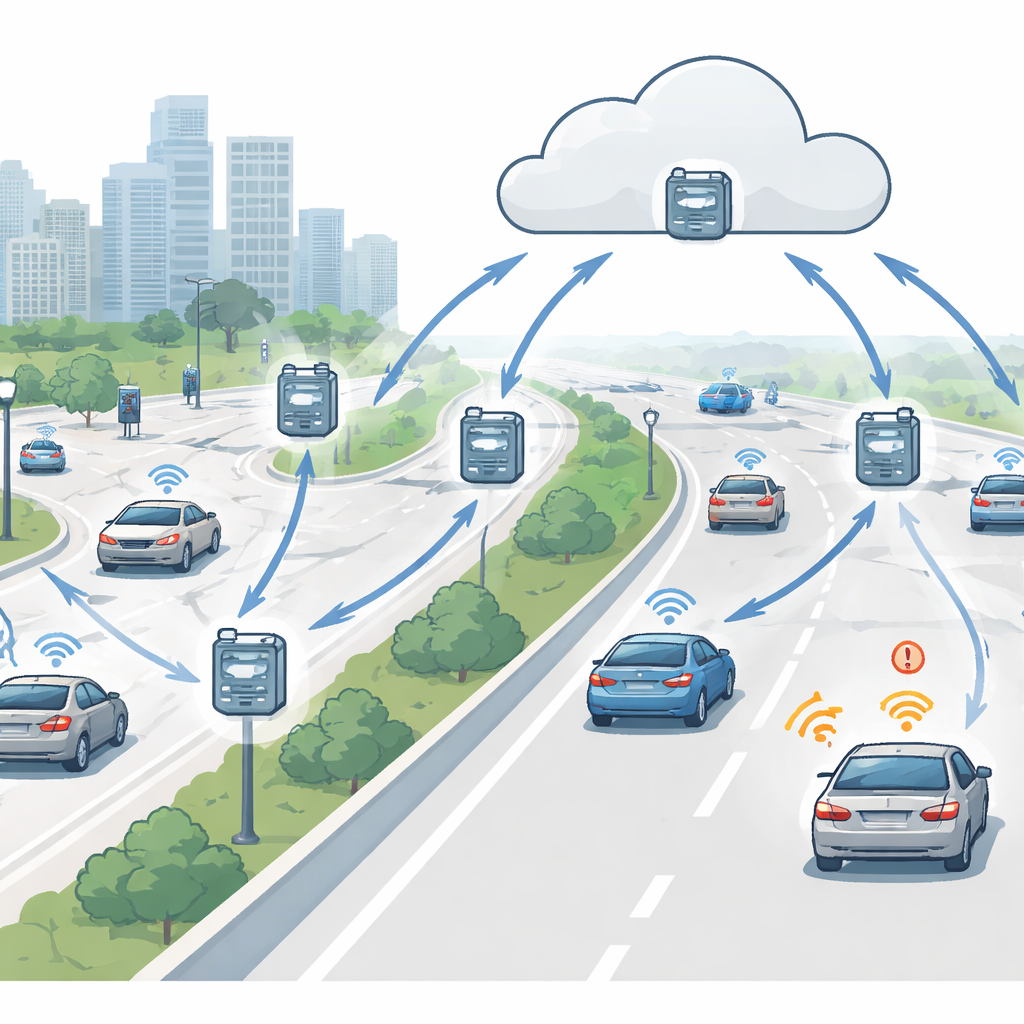
The authors propose a distributed “edge” framework that treats every part of the road network as a local brain. Instead of sending all data to a central cloud, roadside sensors, in-vehicle devices, and even smartphones collect information about speed, traffic density, and weather and send it to nearby edge nodes—small computers at intersections, towers, or roadside units. These edge nodes quickly analyze what is happening around them, decide whether a hazard is forming, and then pass on only key insights to the cloud. The cloud still plays a role, but mainly for long-term analysis, planning, and backup, not for every split-second decision.
How Local Intelligence Spots Trouble
At the heart of the framework is a layered decision pipeline that combines several types of data analysis. First, edge nodes clean and align incoming data, extracting simple features like vehicle speed, acceleration patterns, and local crowding. Then a pair of machine-learning models, Random Forest and Gradient Boosting, work together to judge whether those patterns look risky. Next, a grid-based traffic model treats each piece of road as a cell whose state changes over time, allowing the system to capture how jams or shock waves spread along a highway. Finally, a decision-making module weighs different response options—such as when and how widely to send alerts—under uncertain and constantly changing conditions.
How Warnings Travel Through the Air
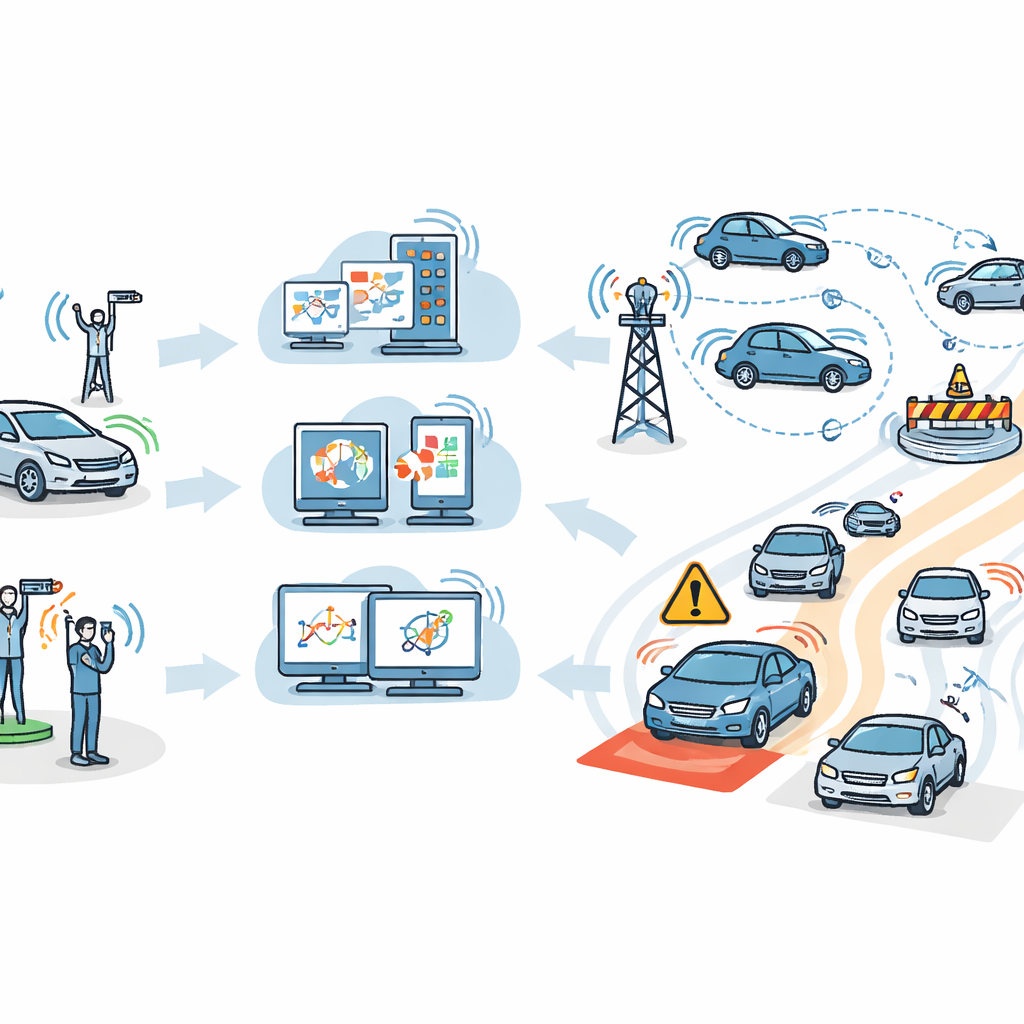
Once a hazard is confirmed, the system uses vehicle-to-everything wireless connections to get the word out fast. Cars can talk directly to each other, to roadside units, and to the wider network. Edge nodes calculate which vehicles are close enough to be at risk and trigger multi-hop messages that leap from one unit to another to cover a wide area. This approach keeps most communication local and short-range, shrinking delays and reducing the amount of data that must cross long, crowded network paths. Drivers receive timely alerts through dashboard displays or smartphone apps; traffic managers see a broader picture through cloud-based dashboards.
Putting the System to the Test
To see whether this design really helps, the researchers built detailed computer simulations using an urban-mobility tool and added both synthetic traffic and real GPS traces. They compared their edge-based framework to a fully centralized cloud system and several standard scheduling methods that decide which computing node handles which task. Across city streets, highways, light and heavy traffic, and varying weather noise, their system detected up to 95 percent of hazards, with alert delays of only 0.2 to 0.3 seconds—about three to five times faster than cloud-based baselines. It also handled more tasks per second, kept the work more evenly spread across edge nodes, used less energy, and dropped far fewer messages even as vehicle counts and data volumes rose.
What This Means for Everyday Travel
For non-specialists, the main message is straightforward: by pushing “smart” processing closer to where data is created—on the roadside and in vehicles—traffic systems can react much more quickly and reliably to sudden dangers. Instead of waiting for distant servers to crunch massive datasets, local edge nodes make fast, informed decisions and share concise warnings with nearby drivers. The study suggests that such a distributed, communication-rich architecture can make roads safer and more resilient in both dense cities and remote highways, providing a practical blueprint for the next generation of connected transportation and, ultimately, fewer crashes and smoother journeys.
Citation: Sahu, D., Prakash, S., Pandey, V.K. et al. Edge based distributed framework for real time hazard detection and road safety in smart transportation. Sci Rep 16, 12232 (2026). https://doi.org/10.1038/s41598-026-42899-w
Keywords: smart transportation, edge computing, hazard detection, V2X communication, road safety