Clear Sky Science · fr
Cadre distribué basé sur l’edge pour la détection des dangers en temps réel et la sécurité routière dans le transport intelligent
Pourquoi des routes plus sûres ont besoin d’avertissements plus rapides
Les villes modernes sont congestionnées par le trafic, et l’augmentation du nombre de véhicules s’accompagne de plus d’accidents, de quasi-accidents et de retards coûteux. Les systèmes de transport intelligents actuels utilisent déjà des capteurs et le cloud pour surveiller la circulation, mais ils réagissent souvent trop lentement lorsqu’un incident survient soudainement : un véhicule freine brutalement, une voie est bloquée ou le brouillard apparaît. Cet article explore une nouvelle façon de repérer ces dangers et d’avertir les conducteurs en fractions de seconde en déplaçant une grande partie de la puissance de calcul depuis des centres de données éloignés vers le bord de la route et même au sein des véhicules.
Une nouvelle façon de surveiller la route
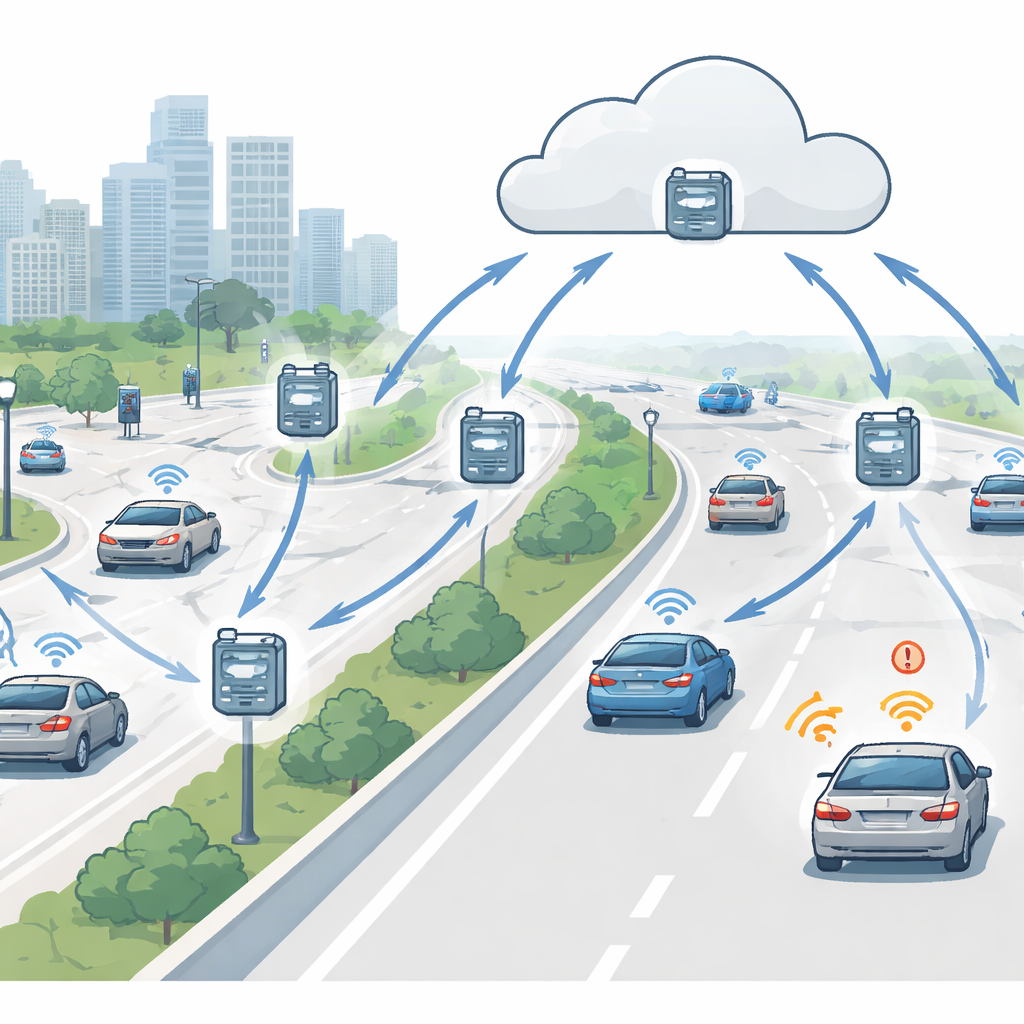
Les auteurs proposent un cadre distribué « edge » qui considère chaque portion du réseau routier comme un cerveau local. Plutôt que d’envoyer toutes les données vers un cloud central, des capteurs en bord de route, des dispositifs embarqués et même des smartphones collectent des informations sur la vitesse, la densité du trafic et la météo, puis les transmettent à des nœuds edge proches—petits ordinateurs aux intersections, sur des mâts ou des unités routières. Ces nœuds edge analysent rapidement ce qui se passe autour d’eux, décident si un danger est en train de se former, puis transmettent au cloud uniquement des informations essentielles. Le cloud conserve un rôle, mais principalement pour l’analyse à long terme, la planification et la sauvegarde, et non pour chaque décision en millisecondes.
Comment l’intelligence locale détecte les problèmes
Au cœur du cadre se trouve une chaîne de décision en couches qui combine plusieurs types d’analyse de données. D’abord, les nœuds edge nettoient et alignent les données entrantes, extrayant des caractéristiques simples comme la vitesse des véhicules, les profils d’accélération et la densité locale. Ensuite, une paire de modèles d’apprentissage automatique, Random Forest et Gradient Boosting, travaille de concert pour évaluer si ces motifs présentent un risque. Puis, un modèle de trafic basé sur une grille considère chaque portion de route comme une cellule dont l’état évolue dans le temps, permettant au système de saisir comment les embouteillages ou les ondes de choc se propagent le long d’une autoroute. Enfin, un module de prise de décision pèse différentes options de réponse—par exemple quand et à quelle ampleur émettre des alertes—dans des conditions incertaines et en perpétuelle évolution.
Comment les avertissements se propagent par voie hertzienne
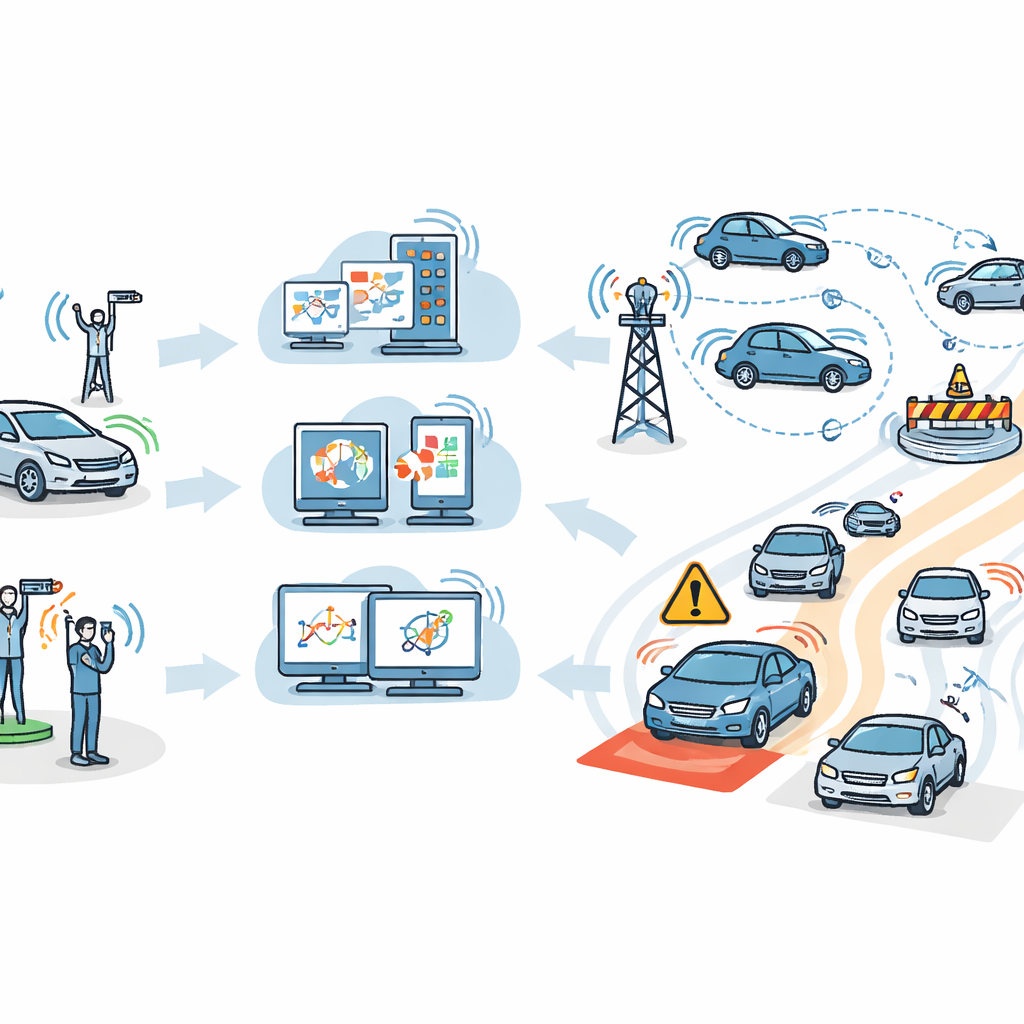
Une fois le danger confirmé, le système utilise des connexions sans fil véhicule‑vers‑tout pour diffuser rapidement l’information. Les voitures peuvent communiquer directement entre elles, avec des unités en bord de route et avec le réseau plus large. Les nœuds edge calculent quels véhicules sont suffisamment proches pour être en danger et déclenchent des messages multi‑sauts qui sautent d’une unité à l’autre pour couvrir une vaste zone. Cette approche maintient la majorité des communications locales et de courte portée, réduisant les délais et la quantité de données devant traverser des trajets réseau longs et encombrés. Les conducteurs reçoivent des alertes opportunes via des affichages de tableau de bord ou des applications smartphones ; les gestionnaires du trafic voient une vue d’ensemble via des tableaux de bord hébergés dans le cloud.
Évaluer le système
Pour vérifier si ce dispositif apporte réellement un bénéfice, les chercheurs ont construit des simulations informatiques détaillées en utilisant un outil de mobilité urbaine et y ont ajouté à la fois du trafic synthétique et des traces GPS réelles. Ils ont comparé leur cadre basé sur l’edge à un système entièrement centralisé dans le cloud et à plusieurs méthodes d’ordonnancement standard qui décident quel nœud de calcul traite quelle tâche. Sur les rues de la ville, les autoroutes, en trafic léger ou dense et avec des variations de bruit météo, leur système a détecté jusqu’à 95 % des dangers, avec des délais d’alerte de seulement 0,2 à 0,3 seconde—environ trois à cinq fois plus rapides que les solutions cloud de référence. Il a aussi traité davantage de tâches par seconde, réparti le travail plus uniformément entre les nœuds edge, consommé moins d’énergie et perdu beaucoup moins de messages même lorsque le nombre de véhicules et le volume de données augmentaient.
Ce que cela signifie pour les trajets quotidiens
Pour les non‑spécialistes, le message principal est simple : en rapprochant le traitement « intelligent » du lieu où les données sont créées—au bord de la route et dans les véhicules—les systèmes de circulation peuvent réagir beaucoup plus rapidement et de façon plus fiable aux dangers soudains. Plutôt que d’attendre que des serveurs éloignés traitent d’énormes ensembles de données, des nœuds edge locaux prennent des décisions rapides et informées et partagent des avertissements concis avec les conducteurs à proximité. L’étude suggère qu’une telle architecture distribuée et riche en communications peut rendre les routes plus sûres et plus résilientes tant dans les villes denses que sur les autoroutes isolées, offrant une feuille de route pragmatique pour la prochaine génération de transports connectés et, en fin de compte, moins d’accidents et des déplacements plus fluides.
Citation: Sahu, D., Prakash, S., Pandey, V.K. et al. Edge based distributed framework for real time hazard detection and road safety in smart transportation. Sci Rep 16, 12232 (2026). https://doi.org/10.1038/s41598-026-42899-w
Mots-clés: transport intelligent, edge computing, détection des dangers, communication V2X, sécurité routière