Clear Sky Science · pl
Krawędziowe rozproszone ramy dla wykrywania zagrożeń w czasie rzeczywistym i bezpieczeństwa drogowego w inteligentnym transporcie
Dlaczego bezpieczniejsze drogi potrzebują szybszych ostrzeżeń
Współczesne miasta duszą się w korkach, a wraz z większą liczbą pojazdów rośnie też liczba wypadków, prawie kolizji i kosztownych opóźnień. Obecne systemy inteligentnego transportu już wykorzystują czujniki i chmurę do monitorowania ruchu, ale często reagują zbyt wolno, gdy nagle coś idzie nie tak: samochód gwałtownie hamuje, pas jest zablokowany albo nadciąga mgła. W artykule opisano nowe podejście do szybkiego wykrywania takich niebezpieczeństw i ostrzegania kierowców w ułamkach sekundy poprzez przeniesienie dużej części mocy obliczeniowej z odległych centrów danych bliżej drogi, a nawet do samych pojazdów.
Nowy sposób obserwacji drogi
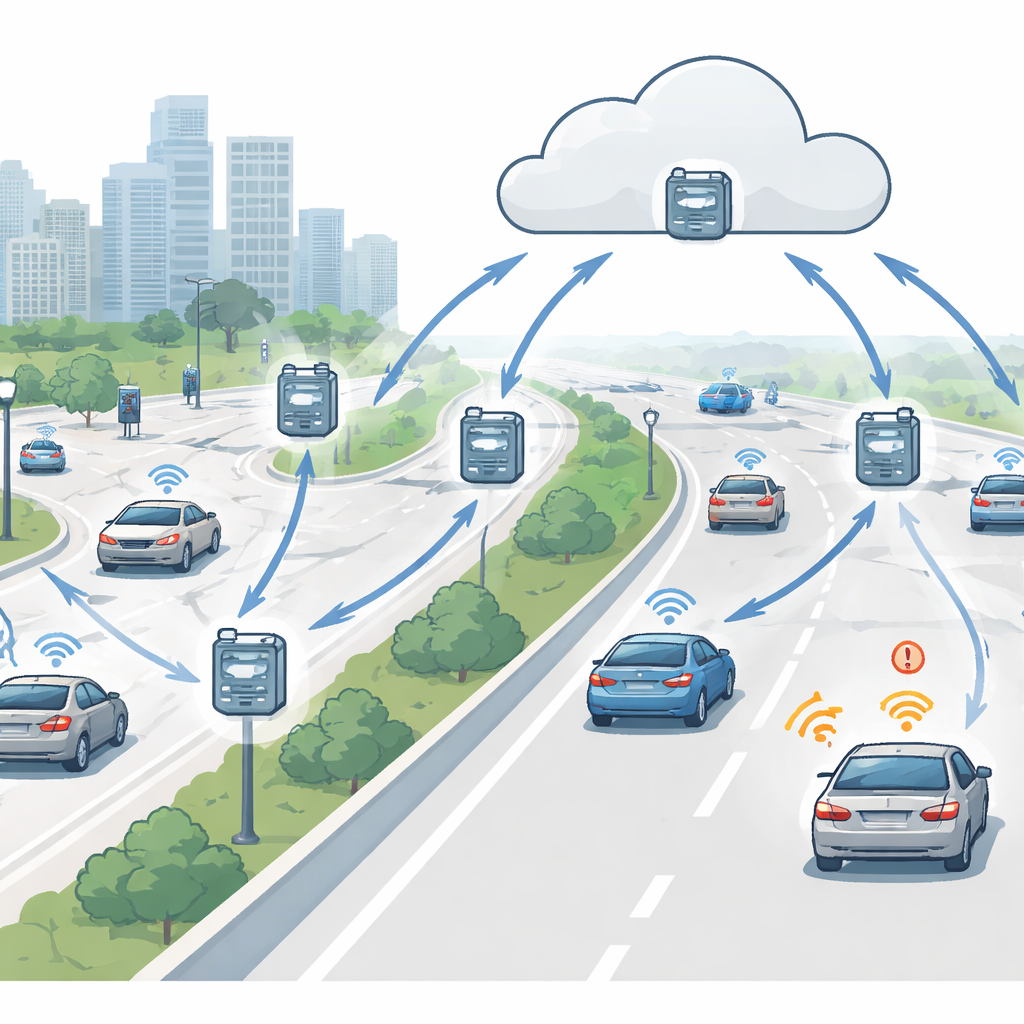
Autorzy proponują rozproszone ramy „edge”, które traktują każdą część sieci drogowej jako lokalny mózg. Zamiast wysyłać wszystkie dane do centralnej chmury, przydrożne czujniki, urządzenia w pojazdach, a nawet smartfony zbierają informacje o prędkości, gęstości ruchu i pogodzie i przekazują je do pobliskich węzłów brzegowych — małych komputerów na skrzyżowaniach, wieżach lub jednostkach przydrożnych. Te węzły szybko analizują, co się wokół nich dzieje, oceniają, czy formuje się zagrożenie, a następnie przekazują do chmury tylko kluczowe wnioski. Chmura nadal odgrywa rolę, ale głównie do analiz długoterminowych, planowania i kopii zapasowych, a nie do każdej decyzji podejmowanej w ułamkach sekundy.
Jak lokalna inteligencja wykrywa kłopoty
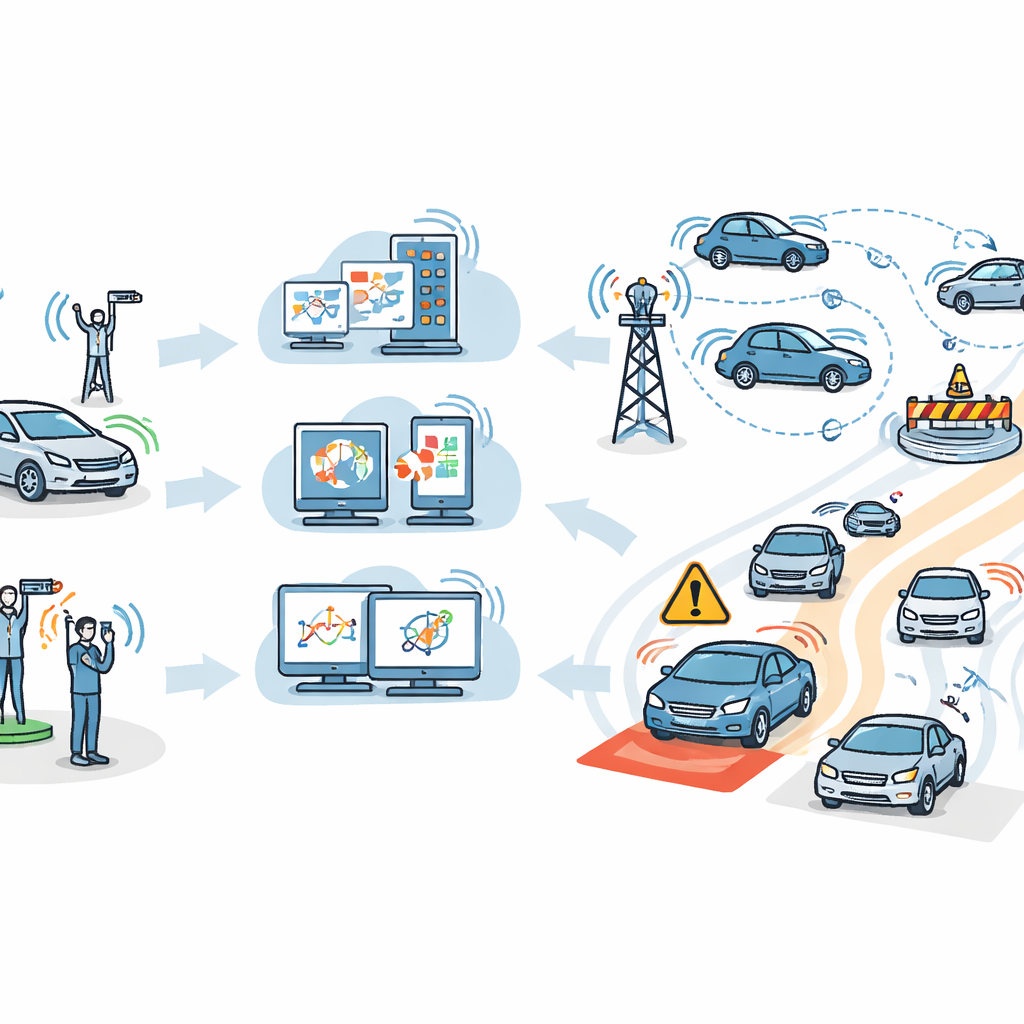
W centrum ram leży wielowarstwowy proces decyzyjny łączący kilka typów analiz danych. Najpierw węzły brzegowe oczyszczają i wyrównują napływające dane, wydobywając proste cechy, takie jak prędkość pojazdów, wzory przyspieszania i lokalne zatłoczenie. Następnie para modeli uczenia maszynowego, Random Forest i Gradient Boosting, współpracuje, aby ocenić, czy te wzorce wyglądają na ryzykowne. Kolejno siatkowy model ruchu traktuje każdy fragment drogi jako komórkę, której stan zmienia się w czasie, co pozwala systemowi uchwycić, jak korki lub fale uderzeniowe rozchodzą się wzdłuż autostrady. Na końcu moduł podejmowania decyzji waży różne opcje reakcji — na przykład kiedy i jak szeroko wysłać ostrzeżenia — w warunkach niepewności i ciągłej zmiany.
Jak ostrzeżenia podróżują przez powietrze
Gdy zagrożenie zostanie potwierdzone, system wykorzystuje bezprzewodowe połączenia vehicle-to-everything, by szybko rozesłać informację. Samochody mogą komunikować się bezpośrednio między sobą, z jednostkami przydrożnymi i z szerszą siecią. Węzły brzegowe obliczają, które pojazdy są na tyle blisko, by być narażonymi, i wywołują przekazy wieloprzeskokowe, które przeskakują od jednej jednostki do drugiej, aby objąć szeroki obszar. Takie podejście pozostawia większość komunikacji lokalną i krótkodystansową, skracając opóźnienia i zmniejszając ilość danych, które muszą przechodzić przez długie, zatłoczone ścieżki sieciowe. Kierowcy otrzymują terminowe alerty przez wyświetlacze deski rozdzielczej lub aplikacje na smartfony; zarządcy ruchu widzą szerszy obraz na pulpitach chmurowych.
Testowanie systemu
Aby sprawdzić, czy ten projekt rzeczywiście pomaga, badacze zbudowali szczegółowe symulacje komputerowe z użyciem narzędzia do modelowania mobilności miejskiej i dodali zarówno syntetyczny ruch, jak i rzeczywiste ślady GPS. Porównali swoje krawędziowe ramy z w pełni scentralizowanym systemem chmurowym oraz kilkoma standardowymi metodami harmonogramowania decydującymi, który węzeł obliczeniowy obsługuje dane zadanie. W miejskich ulicach, na autostradach, przy lekkim i ciężkim ruchu oraz przy zmiennym szumie pogodowym ich system wykrywał do 95 procent zagrożeń, z opóźnieniami alertów wynoszącymi tylko 0,2–0,3 sekundy — około trzy do pięciu razy szybciej niż rozwiązania chmurowe. Obsługiwał też więcej zadań na sekundę, równomierniej rozkładał obciążenie między węzłami brzegowymi, zużywał mniej energii i tracił znacznie mniej komunikatów nawet przy rosnącej liczbie pojazdów i wolumenie danych.
Co to oznacza dla codziennych podróży
Dla osób niezwiązanych ze specjalistycznym polem główna myśl jest prosta: przenosząc „inteligentne” przetwarzanie bliżej miejsca, gdzie powstają dane — na przydroże i do pojazdów — systemy ruchu mogą reagować znacznie szybciej i bardziej niezawodnie na nagłe zagrożenia. Zamiast czekać, aż odległe serwery przeanalizują ogromne zbiory danych, lokalne węzły brzegowe podejmują szybkie, poinformowane decyzje i dzielą się zwięzłymi ostrzeżeniami z pobliskimi kierowcami. Badanie sugeruje, że taka rozproszona architektura bogata w komunikację może uczynić drogi bezpieczniejszymi i bardziej odpornymi zarówno w zatłoczonych miastach, jak i na odległych autostradach, dostarczając praktycznego planu działania dla kolejnej generacji połączonego transportu, a w rezultacie mniej wypadków i płynniejsze podróże.
Cytowanie: Sahu, D., Prakash, S., Pandey, V.K. et al. Edge based distributed framework for real time hazard detection and road safety in smart transportation. Sci Rep 16, 12232 (2026). https://doi.org/10.1038/s41598-026-42899-w
Słowa kluczowe: inteligentny transport, edge computing, wykrywanie zagrożeń, komunikacja V2X, bezpieczeństwo drogowe