Clear Sky Science · ru
Распределённая архитектура на периферии для обнаружения опасностей в реальном времени и обеспечения безопасности дорожного движения в интеллектуальном транспорте
Почему более безопасные дороги требуют более быстрых предупреждений
Современные города задыхаются в пробках: чем больше машин, тем больше аварий, инцидентов и дорогостоящих задержек. Сегодняшние системы умного транспорта уже используют датчики и облачные сервисы для мониторинга трафика, но часто реагируют слишком медленно, когда что‑то внезапно идёт не так: автомобиль резко тормозит, полоса оказывается заблокирована или наступает туман. В этой статье рассматривается новый подход к обнаружению таких опасностей и оповещению водителей за доли секунды — за счёт переноса значительной части вычислительной нагрузки из удалённых дата‑центров ближе к обочинам и даже внутрь самих транспортных средств.
Новый способ наблюдать за дорогой
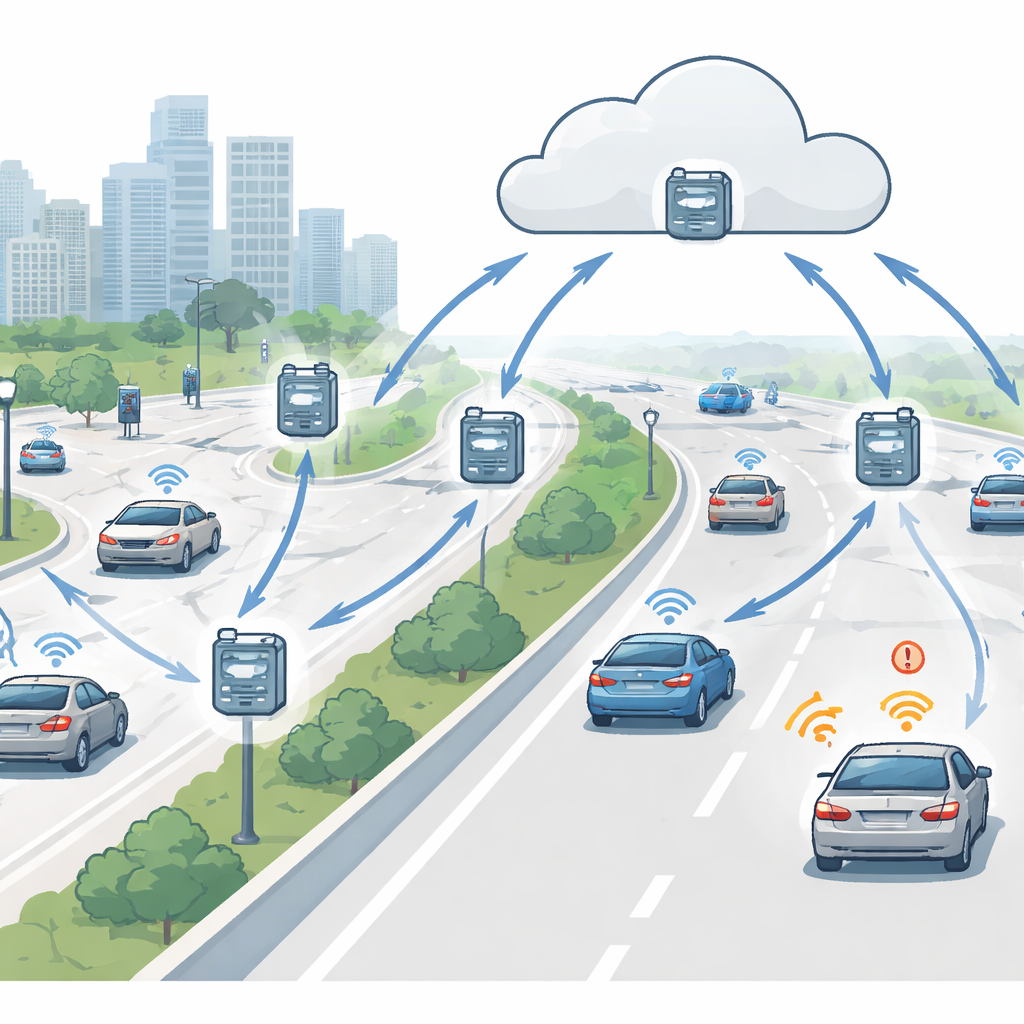
Авторы предлагают распределённую «периферийную» архитектуру, в которой каждая часть дорожной сети выступает как локальный «мозг». Вместо отправки всех данных в центральное облако, при roadside‑датчики, бортовые устройства и даже смартфоны собирают информацию о скорости, плотности трафика и погоде и передают её ближайшим периферийным узлам — небольшим вычислительным устройствам на перекрёстках, вышках или обочинах. Эти узлы быстро анализируют происходящее вокруг, оценивают формирование опасности и передают в облако только ключевые выводы. Облако по‑прежнему используется, но в основном для долгосрочного анализа, планирования и резервирования, а не для каждого микросекундного решения.
Как локальный интеллект замечает проблемы
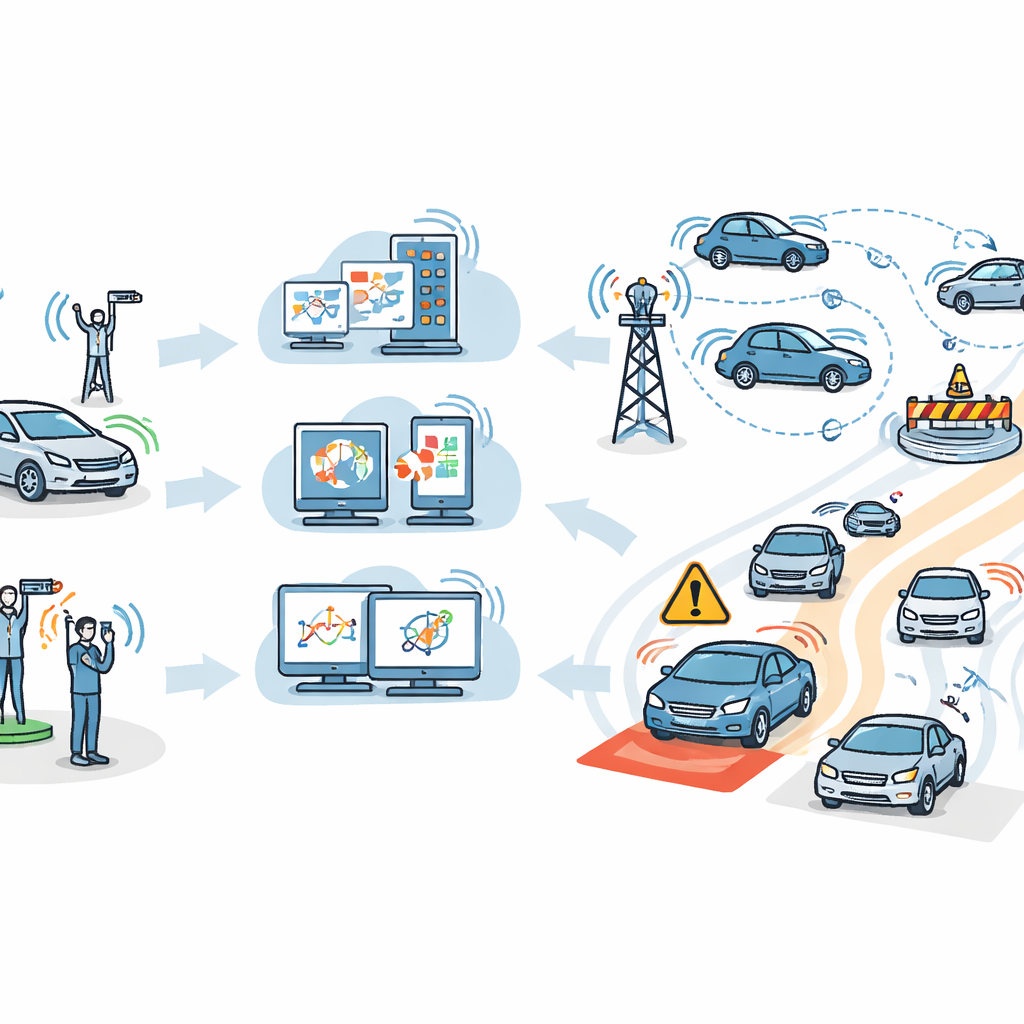
В основе системы — многоуровневый конвейер принятия решений, который сочетает несколько типов анализа данных. Сначала периферийные узлы очищают и выравнивают входящие данные, извлекая простые признаки: скорость автомобиля, характер ускорений, локальную загруженность. Затем пара моделей машинного обучения — Random Forest и Gradient Boosting — совместно оценивают, не указывают ли эти паттерны на риск. Далее сеточная модель трафика рассматривает каждый участок дороги как ячейку, состояние которой меняется со временем, что позволяет системе отследить распространение заторов или ударных волн вдоль магистрали. Наконец, модуль принятия решений взвешивает разные варианты реакции — например, когда и каким охватом рассылать предупреждения — при наличии неопределённости и постоянно меняющихся условий.
Как предупреждения распространяются по воздуху
Когда опасность подтверждена, система использует беспроводные связи «транспортное средство — всё» (V2X), чтобы оперативно уведомить участников движения. Автомобили могут обмениваться сообщениями напрямую друг с другом, с придорожными устройствами и с более широкой сетью. Периферийные узлы рассчитывают, какие транспортные средства находятся в зоне риска, и инициируют многоступенчатую передачу сообщений, которые перескакивают от одного узла к другому, покрывая большую территорию. Такой подход сохраняет коммуникацию преимущественно локальной и короткого радиуса, снижая задержки и уменьшая объём данных, которые должны пройти по длинным и перегруженным сетевым каналам. Водители получают своевременные оповещения через приборные панели или мобильные приложения; диспетчеры видят сводную картину через облачные панели управления.
Проверка системы на практике
Чтобы оценить, действительно ли этот дизайн помогает, исследователи создали детальные компьютерные симуляции с использованием инструмента моделирования городского движения и добавили как синтетический трафик, так и реальные GPS‑треки. Они сравнили свою периферийную архитектуру с полностью централизованной облачной системой и несколькими стандартными методами распределения задач. На городских улицах и автомагистралях, при лёгком и плотном трафике и при различном уровне помех, их система обнаруживала до 95 % опасностей с задержками оповещений всего 0,2–0,3 секунды — примерно в 3–5 раз быстрее, чем облачные решения. Она также обрабатывала больше задач в секунду, равномернее распределяла нагрузку между периферийными узлами, потребляла меньше энергии и теряла значительно меньше сообщений по мере роста числа автомобилей и объёмов данных.
Что это значит для повседневных поездок
Для непрофессионалов главное сообщение простое: приблизив «умную» обработку туда, где создаются данные — на обочину и в транспортные средства — системы управления трафиком могут гораздо быстрее и надёжнее реагировать на внезапные опасности. Вместо ожидания, пока удалённые серверы обработают огромные объёмы данных, локальные периферийные узлы принимают быстрые, обоснованные решения и передают краткие предупреждения близлежащим водителям. Исследование показывает, что такая распределённая архитектура с плотной коммуникацией может сделать дороги безопаснее и устойчивее как в густонаселённых городах, так и на отдалённых трассах, предоставляя практическую основу для следующего поколения подключённого транспорта и, в конечном счёте, приводя к меньшему числу аварий и более комфортным поездкам.
Цитирование: Sahu, D., Prakash, S., Pandey, V.K. et al. Edge based distributed framework for real time hazard detection and road safety in smart transportation. Sci Rep 16, 12232 (2026). https://doi.org/10.1038/s41598-026-42899-w
Ключевые слова: интеллектуальный транспорт, периферийные вычисления, обнаружение опасностей, V2X связь, дорожная безопасность