Clear Sky Science · it
Framework distribuito basato sull'edge per il rilevamento in tempo reale dei pericoli e la sicurezza stradale nei trasporti intelligenti
Perché strade più sicure hanno bisogno di avvisi più rapidi
Le città moderne sono soffocate dal traffico e, all'aumentare dei veicoli, aumentano anche incidenti, quasi-incidenti e ritardi costosi. I sistemi di trasporto intelligenti attuali già usano sensori e il cloud per monitorare il traffico, ma spesso reagiscono troppo lentamente quando qualcosa va storto all'improvviso: un'auto frena bruscamente, una corsia è bloccata o arriva la nebbia. Questo articolo esplora un nuovo modo di individuare tali pericoli e avvertire i conducenti in frazioni di secondo spostando gran parte della potenza di calcolo da centri dati remoti fino al bordo della strada e persino nei veicoli stessi.
Un nuovo modo di osservare la strada
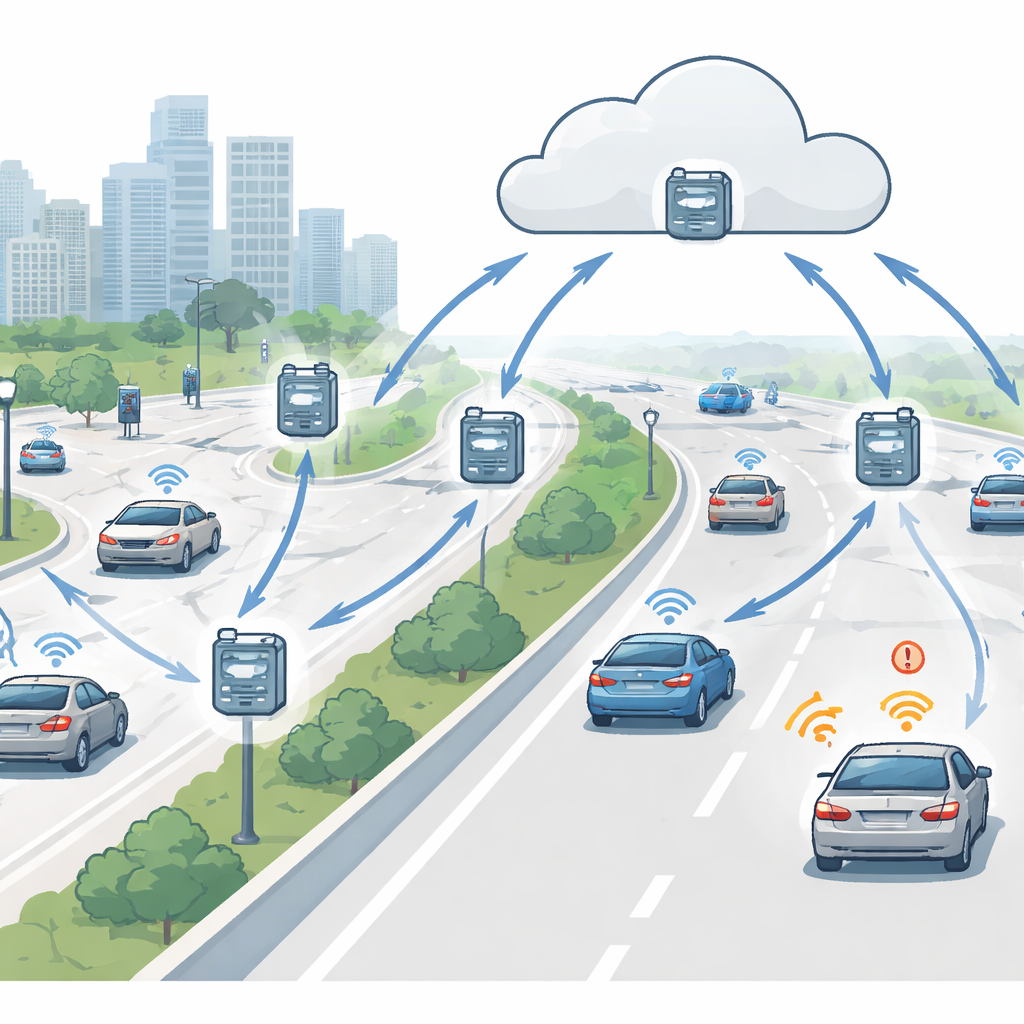
Gli autori propongono un framework distribuito “edge” che considera ogni parte della rete stradale come un cervello locale. Invece di inviare tutti i dati a un cloud centrale, sensori stradali, dispositivi a bordo dei veicoli e persino smartphone raccolgono informazioni su velocità, densità del traffico e condizioni meteorologiche e le inviano a nodi edge vicini—piccoli computer in incroci, torri o unità stradali. Questi nodi edge analizzano rapidamente cosa sta accadendo intorno a loro, decidono se si sta formando un pericolo e trasmettono al cloud solo le intuizioni chiave. Il cloud mantiene un ruolo, ma principalmente per analisi a lungo termine, pianificazione e backup, non per ogni decisione nell'arco di pochi istanti.
Come l'intelligenza locale individua i problemi
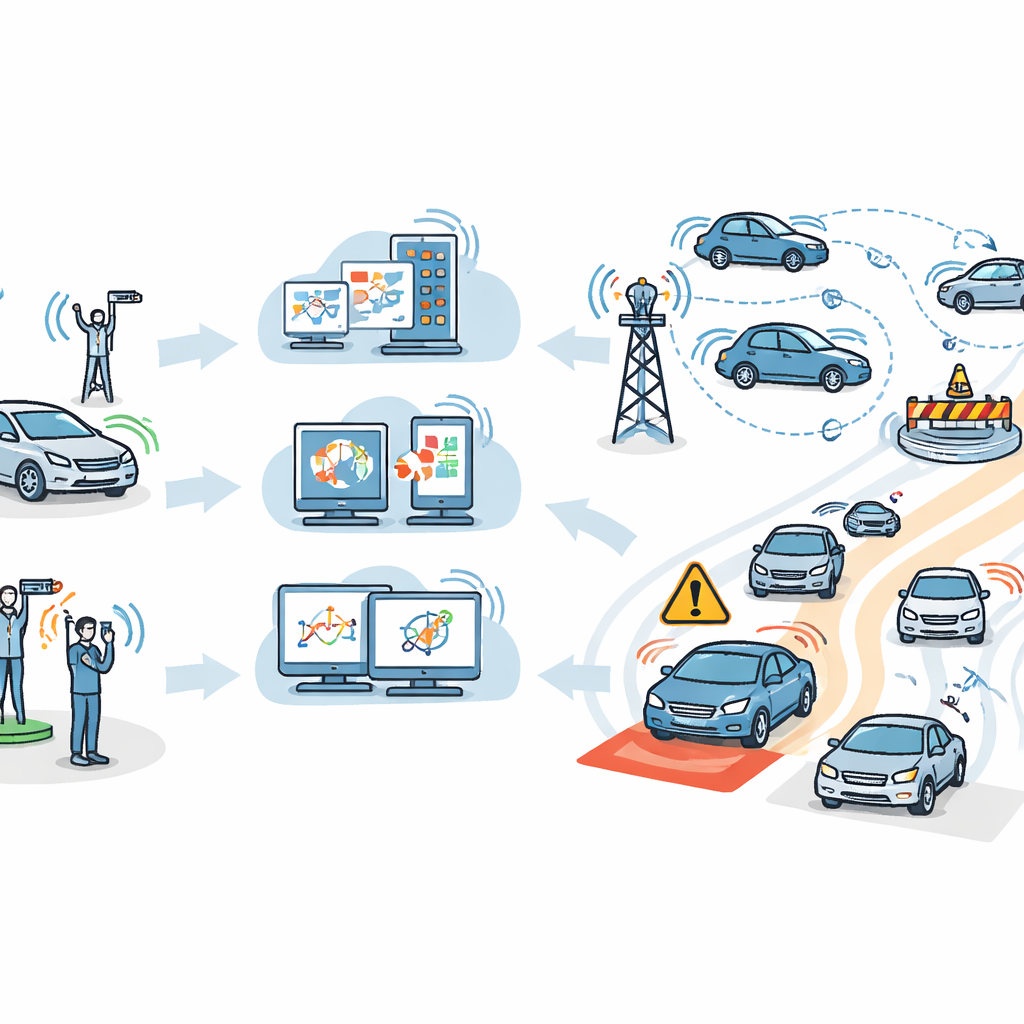
Al centro del framework c'è una pipeline decisionale a livelli che combina diversi tipi di analisi dei dati. Prima i nodi edge puliscono e allineano i dati in arrivo, estraendo caratteristiche semplici come velocità del veicolo, pattern di accelerazione e affollamento locale. Poi una coppia di modelli di machine learning, Random Forest e Gradient Boosting, lavora insieme per giudicare se quei pattern appaiono rischiosi. Successivamente, un modello di traffico basato su griglia tratta ogni tratto di strada come una cella il cui stato cambia nel tempo, permettendo al sistema di catturare come si propagano ingorghi o onde d'urto lungo un'autostrada. Infine, un modulo decisionale valuta diverse opzioni di risposta—come quando e con quale ampiezza inviare gli allarmi—in condizioni di incertezza e cambiamento continuo.
Come gli avvisi viaggiano nell'aria
Una volta confermato un pericolo, il sistema usa connessioni wireless vehicle-to-everything per diffondere rapidamente l'allerta. Le auto possono comunicare direttamente tra loro, con unità stradali e con la rete più ampia. I nodi edge calcolano quali veicoli sono sufficientemente vicini da essere a rischio e innescano messaggi multi-hop che saltano da un'unità all'altra per coprire un'area più vasta. Questo approccio mantiene la maggior parte delle comunicazioni locali e a corto raggio, riducendo i ritardi e la quantità di dati che devono attraversare percorsi di rete lunghi e affollati. I conducenti ricevono avvisi tempestivi tramite display del cruscotto o app per smartphone; i gestori del traffico ottengono una visione più ampia attraverso dashboard basati sul cloud.
Mettere il sistema alla prova
Per verificare se questo design fosse davvero efficace, i ricercatori hanno costruito simulazioni al computer dettagliate usando uno strumento di mobilità urbana e hanno aggiunto sia traffico sintetico sia tracce GPS reali. Hanno confrontato il loro framework basato sull'edge con un sistema completamente centralizzato nel cloud e con diversi metodi di schedulazione standard che decidono quale nodo di calcolo gestisce quale compito. Su strade cittadine, autostrade, traffico leggero e intenso e con rumore meteorologico variabile, il loro sistema ha rilevato fino al 95% dei pericoli, con ritardi di allerta di soli 0,2–0,3 secondi—circa tre-cinque volte più veloce rispetto ai baselines basati sul cloud. Ha inoltre gestito più compiti al secondo, distribuito il carico più uniformemente tra i nodi edge, consumato meno energia e perso molte meno notifiche anche con l'aumento del numero di veicoli e dei volumi di dati.
Cosa significa questo per gli spostamenti quotidiani
Per i non specialisti, il messaggio principale è semplice: spostando l'elaborazione “intelligente” più vicino al punto in cui i dati sono generati—sul bordo della strada e nei veicoli—i sistemi di traffico possono reagire molto più rapidamente e in modo più affidabile ai pericoli improvvisi. Invece di attendere che server remoti elaborino enormi dataset, i nodi edge locali prendono decisioni rapide e informate e condividono avvisi concisi con i conducenti nelle vicinanze. Lo studio suggerisce che un'architettura distribuita e ricca di comunicazione come questa può rendere le strade più sicure e resilienti sia nelle città dense sia sulle autostrade remote, offrendo un progetto pratico per la prossima generazione di trasporti connessi e, in ultima analisi, meno incidenti e viaggi più fluidi.
Citazione: Sahu, D., Prakash, S., Pandey, V.K. et al. Edge based distributed framework for real time hazard detection and road safety in smart transportation. Sci Rep 16, 12232 (2026). https://doi.org/10.1038/s41598-026-42899-w
Parole chiave: trasporti intelligenti, edge computing, rilevamento dei pericoli, comunicazione V2X, sicurezza stradale