Clear Sky Science · de
Kantenbasiertes verteiltes Framework zur Echtzeit-Gefahrenerkennung und Verkehrssicherheit im intelligenten Verkehr
Warum sicherere Straßen schnellere Warnungen brauchen
Moderne Städte ersticken im Verkehr — und mit mehr Fahrzeugen entstehen mehr Unfälle, Beinaheunfälle und kostspielige Verzögerungen. Heutige intelligente Verkehrssysteme nutzen bereits Sensoren und die Cloud, um den Verkehr zu überwachen, reagieren jedoch häufig zu langsam, wenn plötzlich etwas schiefgeht: ein Auto bremst stark, eine Spur ist blockiert oder dichter Nebel zieht auf. Dieser Artikel untersucht einen neuen Ansatz, um solche Gefahren in Bruchteilen einer Sekunde zu erkennen und Fahrer zu warnen, indem ein großer Teil der Rechenleistung von entfernten Rechenzentren an den Straßenrand und sogar in die Fahrzeuge verlegt wird.
Eine neue Art, die Straße zu überwachen
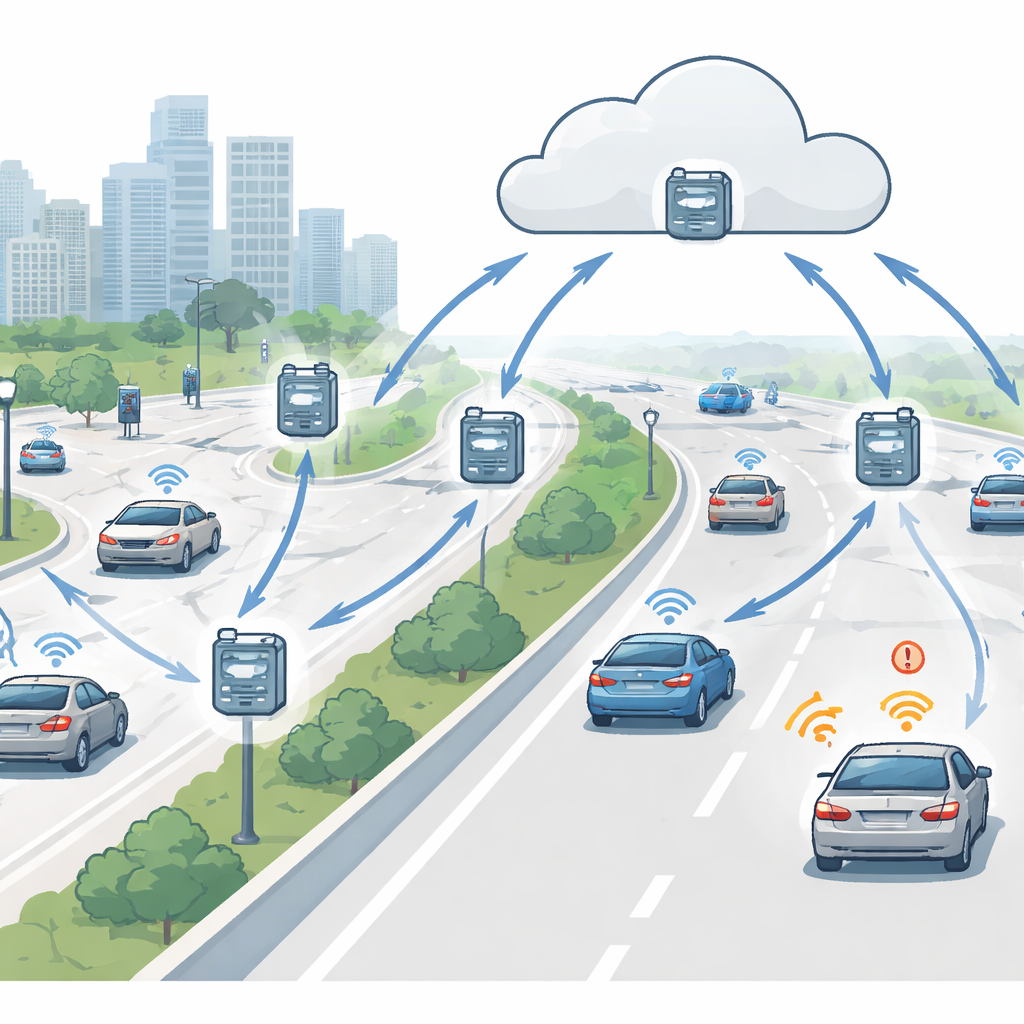
Die Autoren schlagen ein verteiltes „Edge“-Framework vor, das jeden Teil des Straßennetzes als lokales Gehirn behandelt. Anstatt alle Daten an eine zentrale Cloud zu senden, sammeln Straßenrand-Sensoren, Geräte in Fahrzeugen und sogar Smartphones Informationen über Geschwindigkeit, Verkehrsdichte und Wetter und leiten sie an nahegelegene Edge-Knoten weiter — kleine Rechner an Kreuzungen, Türmen oder Straßenstationen. Diese Edge-Knoten analysieren schnell das Geschehen in ihrer Umgebung, beurteilen, ob sich eine Gefahr entwickelt, und übermitteln dann nur die wichtigsten Erkenntnisse an die Cloud. Die Cloud bleibt weiterhin wichtig, dient aber hauptsächlich der Langzeitanalyse, Planung und als Backup, nicht jedoch für jede split-second-Entscheidung.
Wie lokale Intelligenz Probleme erkennt
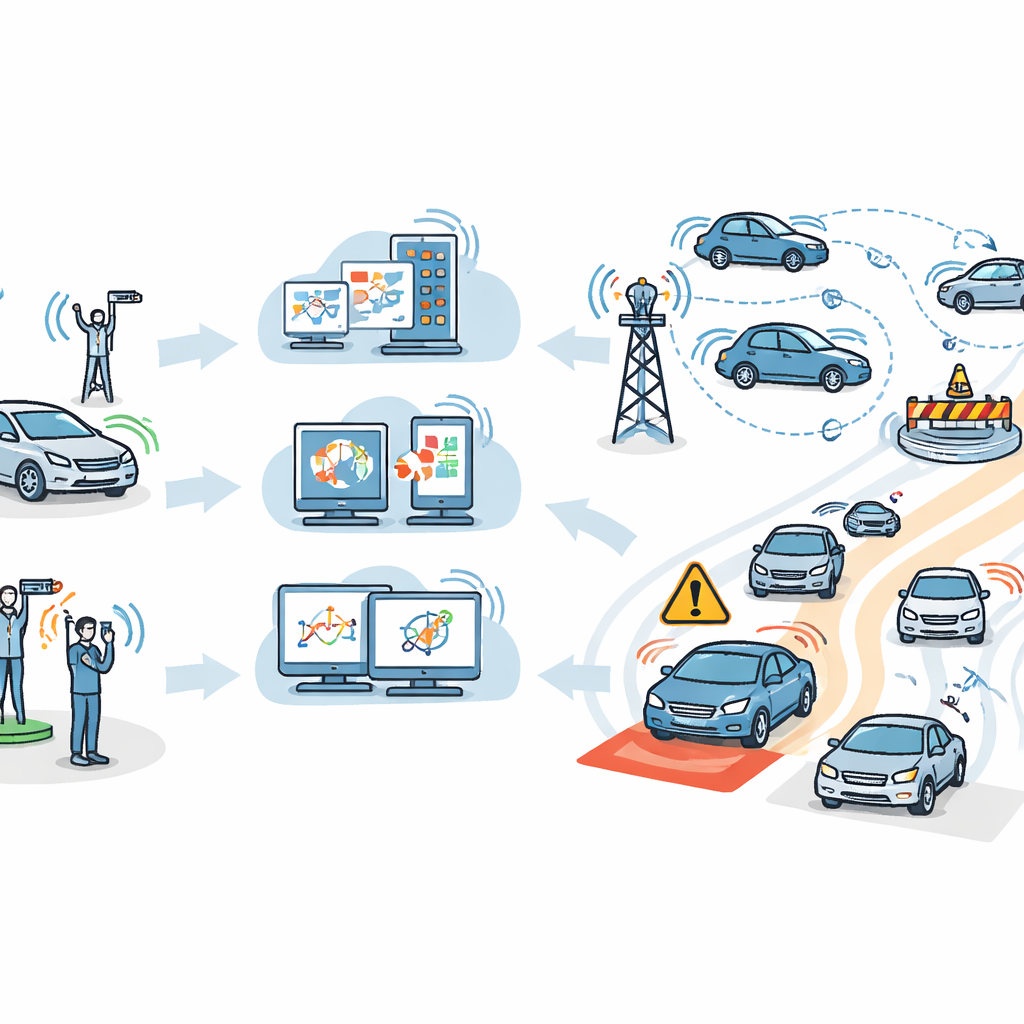
Im Kern des Frameworks steht eine mehrschichtige Entscheidungs-Pipeline, die mehrere Arten der Datenanalyse kombiniert. Zuerst bereinigen und synchronisieren die Edge-Knoten eingehende Daten und extrahieren einfache Merkmale wie Fahrzeuggeschwindigkeit, Beschleunigungsmuster und lokale Verdichtungen. Dann arbeiten zwei Machine-Learning-Modelle — Random Forest und Gradient Boosting — zusammen, um zu beurteilen, ob diese Muster riskant erscheinen. Anschließend behandelt ein gitterbasiertes Verkehrsmodell jedes Straßenstück als Zelle, deren Zustand sich über die Zeit ändert; so kann das System erfassen, wie Staus oder Schockwellen entlang einer Autobahn entstehen und sich ausbreiten. Schließlich wägt ein Entscheidungsmodul unter unsicheren und sich ständig ändernden Bedingungen verschiedene Reaktionsoptionen ab — etwa wann und wie breit Warnungen verschickt werden sollen.
Wie Warnungen drahtlos verbreitet werden
Sobald eine Gefahr bestätigt ist, nutzt das System Vehicle-to-Everything-Funkverbindungen, um die Meldung schnell zu verbreiten. Autos können direkt miteinander, mit Straßenunits und mit dem weiteren Netzwerk kommunizieren. Edge-Knoten berechnen, welche Fahrzeuge nah genug sind, um gefährdet zu sein, und lösen Multi-Hop-Nachrichten aus, die von einer Einheit zur nächsten springen, um ein größeres Gebiet abzudecken. Dieser Ansatz hält die meiste Kommunikation lokal und kurzreichweitig, verkürzt Verzögerungen und reduziert die Datenmengen, die über lange, stark genutzte Netzpfade laufen müssen. Fahrer erhalten rechtzeitige Warnungen über Armaturenbrettanzeigen oder Smartphone-Apps; Verkehrsmanager sehen ein umfassenderes Bild über cloud-basierte Dashboards.
Systemtests in der Praxis
Um zu prüfen, ob dieses Design tatsächlich hilft, bauten die Forschenden detaillierte Computersimulationen mit einem urbanen Mobilitätswerkzeug und fügten sowohl synthetischen Verkehr als auch reale GPS-Spuren hinzu. Sie verglichen ihr kantenbasiertes Framework mit einem vollständig zentralisierten Cloud-System und mehreren Standard-Scheduling-Methoden, die entscheiden, welcher Rechenknoten welche Aufgabe übernimmt. Auf Stadtstraßen, Autobahnen, bei wenig und starkem Verkehr sowie variierendem Wettern rauschte ihr System bis zu 95 Prozent der Gefahren auf, mit Alarmverzögerungen von nur 0,2 bis 0,3 Sekunden — etwa drei- bis fünfmal schneller als cloud-basierte Vergleiche. Es bearbeitete außerdem mehr Aufgaben pro Sekunde, verteilte die Arbeit gleichmäßiger auf Edge-Knoten, verbrauchte weniger Energie und ließ weit weniger Nachrichten verlorengehen, selbst wenn Fahrzeugzahlen und Datenvolumen zunahmen.
Was das für den Alltag bedeutet
Für Nichtfachleute ist die Kernbotschaft einfach: Indem die „intelligente“ Verarbeitung näher an den Ort verlagert wird, an dem Daten entstehen — an Straßenrand und in Fahrzeugen — können Verkehrssysteme viel schneller und zuverlässiger auf plötzliche Gefahren reagieren. Anstatt auf entfernte Server zu warten, die massive Datensätze verarbeiten, treffen lokale Edge-Knoten schnelle, fundierte Entscheidungen und teilen prägnante Warnungen mit nahegelegenen Fahrern. Die Studie legt nahe, dass eine solche verteilte, kommunikationsreiche Architektur Straßen sicherer und widerstandsfähiger machen kann — in dichten Städten wie auf entlegenen Autobahnen — und bietet einen praxisnahen Fahrplan für die nächste Generation vernetzter Mobilität und letztlich weniger Unfälle sowie flüssigere Fahrten.
Zitation: Sahu, D., Prakash, S., Pandey, V.K. et al. Edge based distributed framework for real time hazard detection and road safety in smart transportation. Sci Rep 16, 12232 (2026). https://doi.org/10.1038/s41598-026-42899-w
Schlüsselwörter: intelligenter Verkehr, Edge-Computing, Gefahrenerkennung, V2X-Kommunikation, Verkehrssicherheit