Clear Sky Science · sv
Kantbaserat distribuerat ramverk för realtidsfaranalys och trafiksäkerhet i smarta transporter
Varför säkrare vägar behöver snabbare varningar
Moderna städer kvävs av trafik, och fler fordon innebär fler olyckor, nära-olyckor och kostsamma förseningar. Dagens smarta transportsystem använder redan sensorer och molnet för att övervaka trafiken, men de reagerar ofta för långsamt när något plötsligt går fel: en bil bromsar hårt, ett körfält blockeras eller dimma rullar in. Denna artikel undersöker ett nytt sätt att upptäcka sådana faror och varna förare på bråkdelar av en sekund genom att flytta en stor del av beräkningskraften från avlägsna datacenter ner till vägkanten och till och med in i själva fordonen.
Ett nytt sätt att övervaka vägen
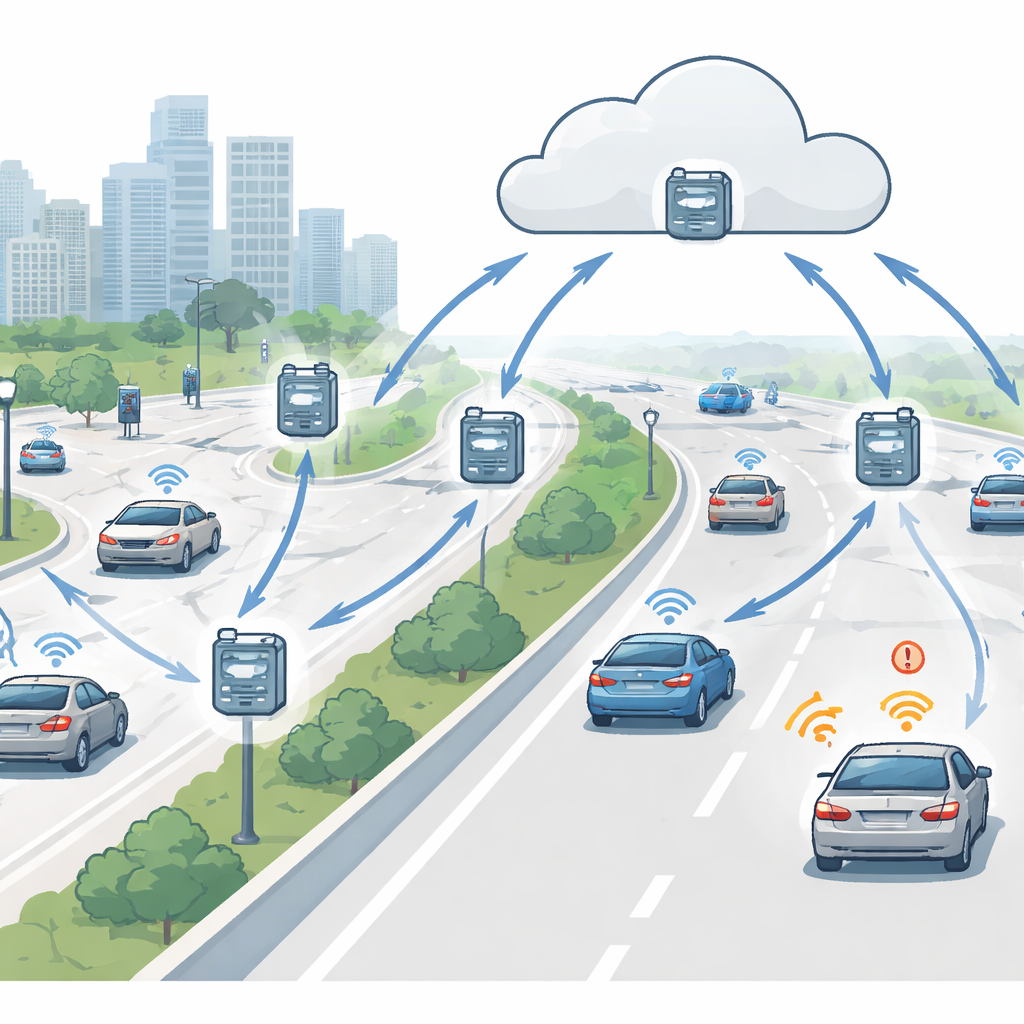
Författarna föreslår ett distribuerat "kant"-ramverk som behandlar varje del av vägnätet som en lokal hjärna. Istället för att skicka all data till ett centralt moln samlar vägkantssensorer, enhetsutrustning i fordon och till och med smartphones information om hastighet, trafiktäthet och väder och skickar den till närliggande kantnoder—små datorer vid korsningar, master eller vägkantsenheter. Dessa kantnoder analyserar snabbt vad som händer runt dem, avgör om en fara håller på att bildas och vidarebefordrar sedan endast nyckelinsikter till molnet. Molnet spelar fortfarande en roll, men mest för långtidsanalys, planering och backup, inte för varje beslut i bråkdelen av en sekund.
Hur lokal intelligens upptäcker problem
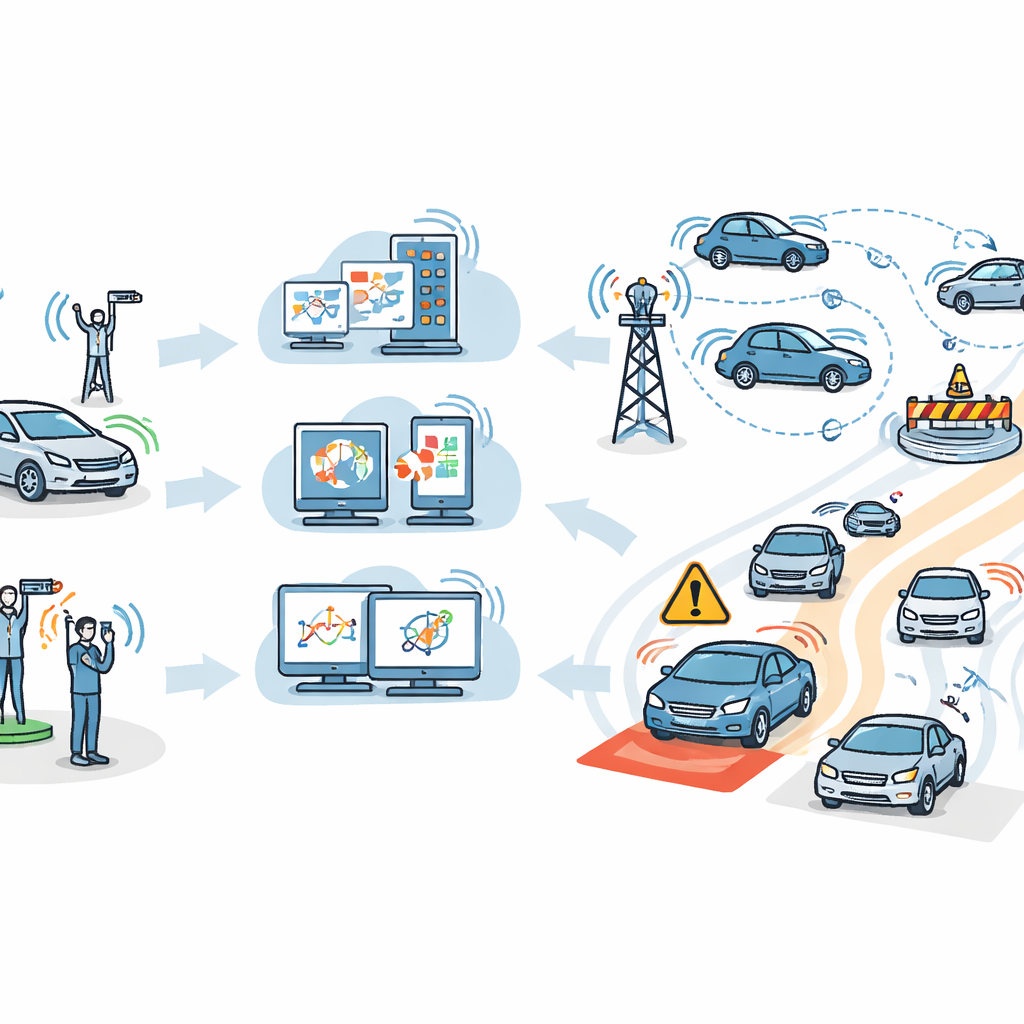
I kärnan av ramverket ligger en flerskiktad besluts-pipeline som kombinerar flera typer av dataanalys. Först rensar och synkroniserar kantnoder inkommande data och extraherar enkla funktioner som fordonshastighet, accelerationsmönster och lokal trängsel. Därefter samarbetar ett par maskininlärningsmodeller, Random Forest och Gradient Boosting, för att bedöma om dessa mönster ser riskfyllda ut. Nästa steg är en rutnätsbaserad trafikmodell som behandlar varje vägavsnitt som en cell vars tillstånd förändras över tid, vilket gör det möjligt för systemet att fånga hur köer eller chockvågor sprider sig längs en motorväg. Slutligen väger en beslutsmodul olika responsalternativ—till exempel när och hur brett varningar ska skickas—under osäkra och ständigt föränderliga förhållanden.
Hur varningar färdas genom luften
När en fara bekräftats använder systemet fordon-till-allt trådlösa förbindelser för att snabbt sprida budskapet. Bilar kan kommunicera direkt med varandra, med vägkantsenheter och med det bredare nätverket. Kantnoder beräknar vilka fordon som befinner sig tillräckligt nära för att vara i riskzonen och utlöser multi-hop-meddelanden som hoppar från en enhet till en annan för att täcka ett stort område. Detta tillvägagångssätt håller större delen av kommunikationen lokal och kortdistans, vilket krymper fördröjningar och minskar mängden data som måste färdas över långa, överbelastade nätvägar. Förare får tidsenliga varningar via instrumentpaneler eller smartphone-appar; trafiksamordnare får en bredare bild via molnbaserade instrumentpaneler.
Sätta systemet på prov
För att se om denna design verkligen hjälper byggde forskarna detaljerade datorsimuleringar med ett verktyg för urban rörlighet och lade till både syntetisk trafik och verkliga GPS-spår. De jämförde sitt kantbaserade ramverk med ett helt centraliserat molnsystem och flera standardmetoder för schemaläggning som avgör vilken beräkningsnod som hanterar vilken uppgift. Över stadsgator, motorvägar, lätt och tung trafik och varierande väderbrus upptäckte deras system upp till 95 procent av farorna, med varningsfördröjningar på bara 0,2 till 0,3 sekunder—ungefär tre till fem gånger snabbare än molnbaserade referenser. Det hanterade också fler uppgifter per sekund, höll arbetsbördan jämnare fördelad över kantnoder, använde mindre energi och tappade betydligt färre meddelanden även när antalet fordon och datavolymer ökade.
Vad detta betyder för vardagligt resande
För icke-specialister är huvudbudskapet enkelt: genom att flytta "smart" bearbetning närmare där datan skapas—vid vägkanten och i fordon—kan trafiksystem reagera mycket snabbare och mer pålitligt på plötsliga faror. Istället för att vänta på avlägsna servrar som bearbetar enorma datamängder tar lokala kantnoder snabba, välgrundade beslut och delar koncisa varningar med närliggande förare. Studien antyder att en sådan distribuerad, kommunikationsrik arkitektur kan göra vägar säkrare och mer robusta både i täta städer och på avlägsna motorvägar, och ge en praktisk modell för nästa generations uppkopplade transporter—i slutändan färre olyckor och smidigare resor.
Citering: Sahu, D., Prakash, S., Pandey, V.K. et al. Edge based distributed framework for real time hazard detection and road safety in smart transportation. Sci Rep 16, 12232 (2026). https://doi.org/10.1038/s41598-026-42899-w
Nyckelord: smarta transporter, kantberäkning, faranalys, V2X-kommunikation, vägsäkerhet