Clear Sky Science · es
Marco distribuido basado en el borde para la detección de peligros en tiempo real y la seguridad vial en el transporte inteligente
Por qué las carreteras más seguras necesitan advertencias más rápidas
Las ciudades modernas están asfixiadas por el tráfico, y a más vehículos hay más choques, casi colisiones y retrasos costosos. Los sistemas de transporte inteligente actuales ya utilizan sensores y la nube para monitorizar el tráfico, pero a menudo reaccionan con demasiada lentitud cuando algo falla de forma repentina: un coche frena bruscamente, un carril queda bloqueado o aparece niebla. Este artículo explora una nueva forma de detectar esos peligros y avisar a los conductores en fracciones de segundo al mover gran parte de la potencia de cálculo desde centros de datos lejanos hacia la carretera y hasta los propios vehículos.
Una nueva manera de vigilar la carretera
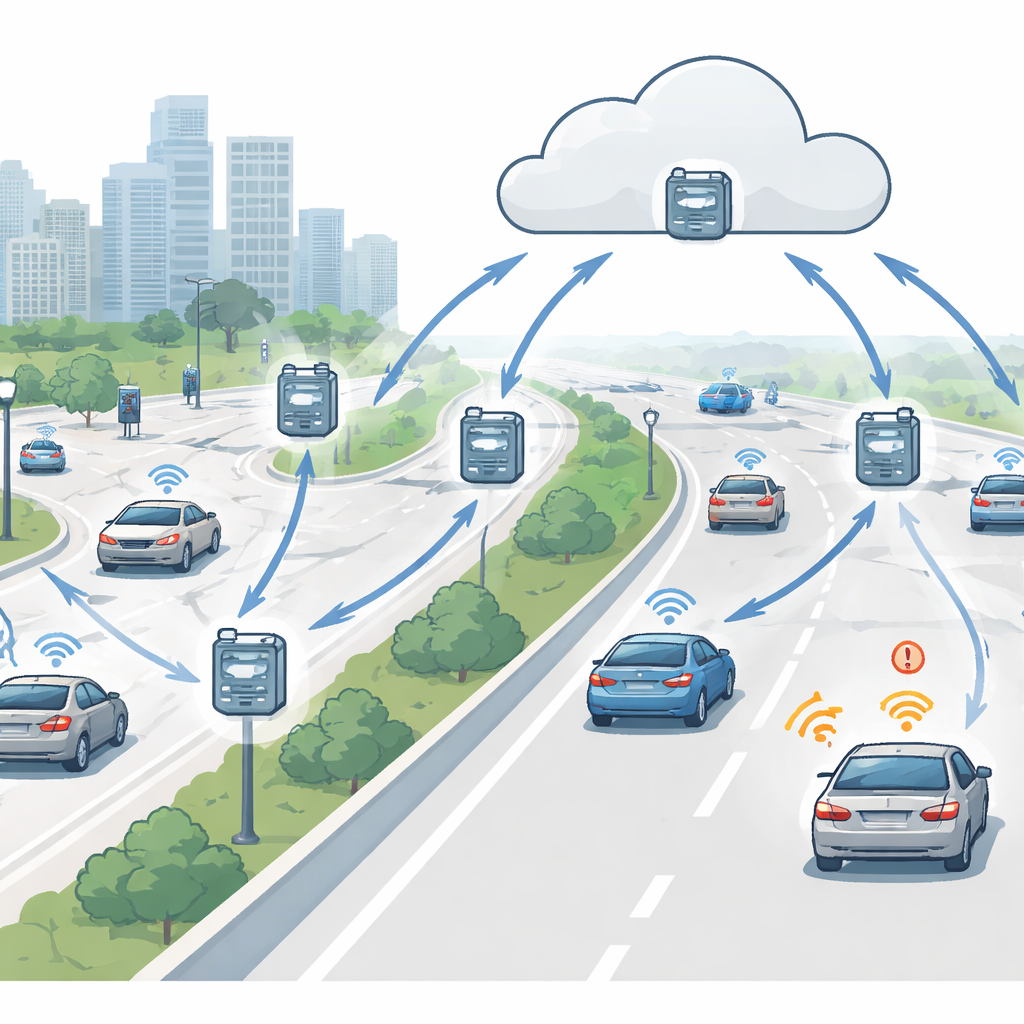
Los autores proponen un marco distribuido de “edge” que trata cada parte de la red viaria como un cerebro local. En lugar de enviar todos los datos a una nube central, sensores en la vía, dispositivos en los vehículos e incluso teléfonos inteligentes recogen información sobre velocidad, densidad de tráfico y tiempo atmosférico y la envían a nodos de borde cercanos—pequeños ordenadores en intersecciones, torres o unidades en el arcén. Estos nodos de borde analizan rápidamente lo que ocurre a su alrededor, deciden si se está formando un peligro y solo pasan al cloud los conocimientos clave. La nube sigue jugando un papel, pero principalmente para análisis a largo plazo, planificación y respaldo, no para cada decisión que debe tomarse en décimas de segundo.
Cómo la inteligencia local detecta problemas
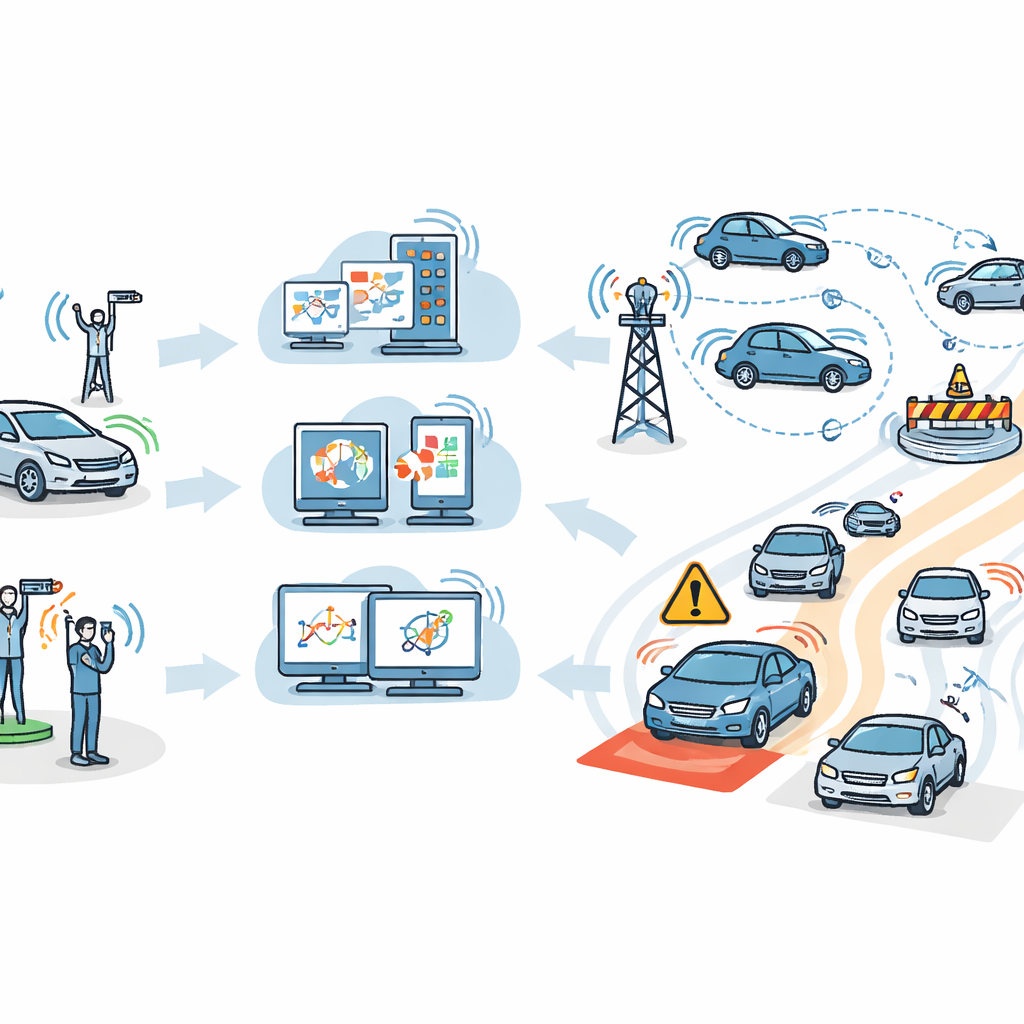
En el núcleo del marco hay una tubería de decisión en capas que combina varios tipos de análisis de datos. Primero, los nodos de borde limpian y alinean los datos entrantes, extrayendo características simples como la velocidad del vehículo, patrones de aceleración y la congestión local. Luego, un par de modelos de aprendizaje automático, Random Forest y Gradient Boosting, trabajan en conjunto para juzgar si esos patrones parecen riesgosos. A continuación, un modelo de tráfico basado en una cuadrícula trata cada tramo de vía como una celda cuyo estado cambia con el tiempo, lo que permite al sistema capturar cómo se propagan los atascos o las ondas de choque a lo largo de una autopista. Finalmente, un módulo de toma de decisiones pondera diferentes opciones de respuesta —por ejemplo, cuándo y con qué alcance enviar alertas— en condiciones inciertas y en constante cambio.
Cómo viajan las advertencias por el aire
Una vez confirmado un peligro, el sistema utiliza conexiones inalámbricas vehículo-a-todo (V2X) para difundir la información rápidamente. Los coches pueden comunicarse directamente entre sí, con unidades en la vía y con la red más amplia. Los nodos de borde calculan qué vehículos están lo bastante cerca como para estar en riesgo y desencadenan mensajes multi-hop que saltan de una unidad a otra para cubrir una zona extensa. Este enfoque mantiene la mayor parte de la comunicación local y de corto alcance, reduciendo retrasos y la cantidad de datos que deben cruzar rutas de red largas y congestionadas. Los conductores reciben alertas oportunas a través de las pantallas del salpicadero o aplicaciones móviles; los gestores de tráfico obtienen una visión más amplia mediante paneles basados en la nube.
Poniendo el sistema a prueba
Para comprobar si este diseño realmente ayuda, los investigadores construyeron simulaciones por ordenador detalladas usando una herramienta de movilidad urbana y añadieron tanto tráfico sintético como trazas GPS reales. Compararon su marco basado en el borde con un sistema totalmente centralizado en la nube y con varios métodos de planificación estándar que deciden qué nodo informático maneja cada tarea. En calles urbanas, autopistas, tráfico ligero y denso y con diferentes niveles de ruido meteorológico, su sistema detectó hasta el 95 por ciento de los peligros, con retrasos en las alertas de solo 0,2 a 0,3 segundos—aproximadamente tres a cinco veces más rápido que las soluciones basadas en la nube. También manejó más tareas por segundo, distribuyó la carga de trabajo de forma más uniforme entre los nodos de borde, consumió menos energía y perdió muchas menos comunicaciones incluso cuando aumentaban el número de vehículos y el volumen de datos.
Qué significa esto para los desplazamientos cotidianos
Para el público general, el mensaje principal es claro: al acercar el procesamiento “inteligente” al lugar donde se generan los datos—en la vía y en los vehículos—los sistemas de tráfico pueden reaccionar con mucha más rapidez y fiabilidad ante peligros súbitos. En lugar de esperar a que servidores remotos procesen enormes conjuntos de datos, los nodos de borde locales toman decisiones rápidas e informadas y comparten advertencias concisas con los conductores cercanos. El estudio sugiere que una arquitectura distribuida y rica en comunicaciones puede hacer las carreteras más seguras y resilientes tanto en ciudades densas como en autopistas remotas, ofreciendo un plan práctico para la próxima generación de transporte conectado y, en última instancia, menos accidentes y viajes más fluidos.
Cita: Sahu, D., Prakash, S., Pandey, V.K. et al. Edge based distributed framework for real time hazard detection and road safety in smart transportation. Sci Rep 16, 12232 (2026). https://doi.org/10.1038/s41598-026-42899-w
Palabras clave: transporte inteligente, computación en el borde, detección de peligros, comunicación V2X, seguridad vial