Clear Sky Science · zh
结合 YOLOv8–LSTM 的管内检测机器人系统(IPIRS)设计,用于实时管内导航
管道内部的机器人
每天,大量埋地管网默默输送着现代生活所依赖的石油、天然气和水。这些管道中许多已趋于老化、难以接近且人工检查存在危险。本文提出了一种新型机器人——体积小到可以在管道内爬行,利用先进的摄像视觉和预测软件引导自身通过弯曲、拐角和分支,同时在故障演变为灾难之前识别出异常。
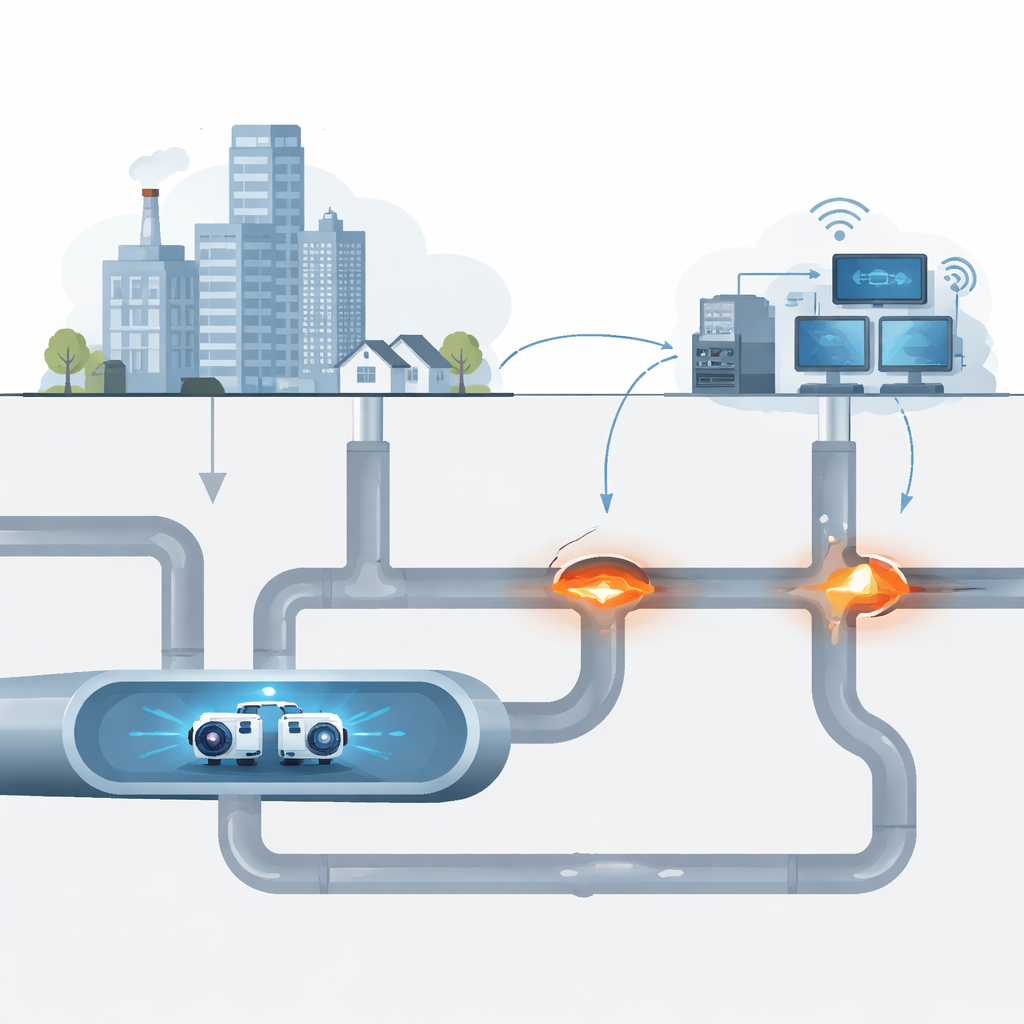
为什么看清管道内部如此困难
隐藏的管线在街道、田地和工厂下延伸数百公里。随着时间推移,它们可能腐蚀、开裂或堵塞,导致泄漏、爆裂或阻塞。传统检查依赖人员将摄像机或设备放入窨井中,既缓慢又危险,并且仍会漏掉许多缺陷。早期的管道机器人提高了安全性,但在应对狭窄弯曲和变化的管径时表现欠佳。它们的车轮会打滑,在分支处卡住,且简单的摄像头无法足够解读视野,从而难以自主导航或提前向操作人员发出警示。
为狭小空间打造的柔性机器人
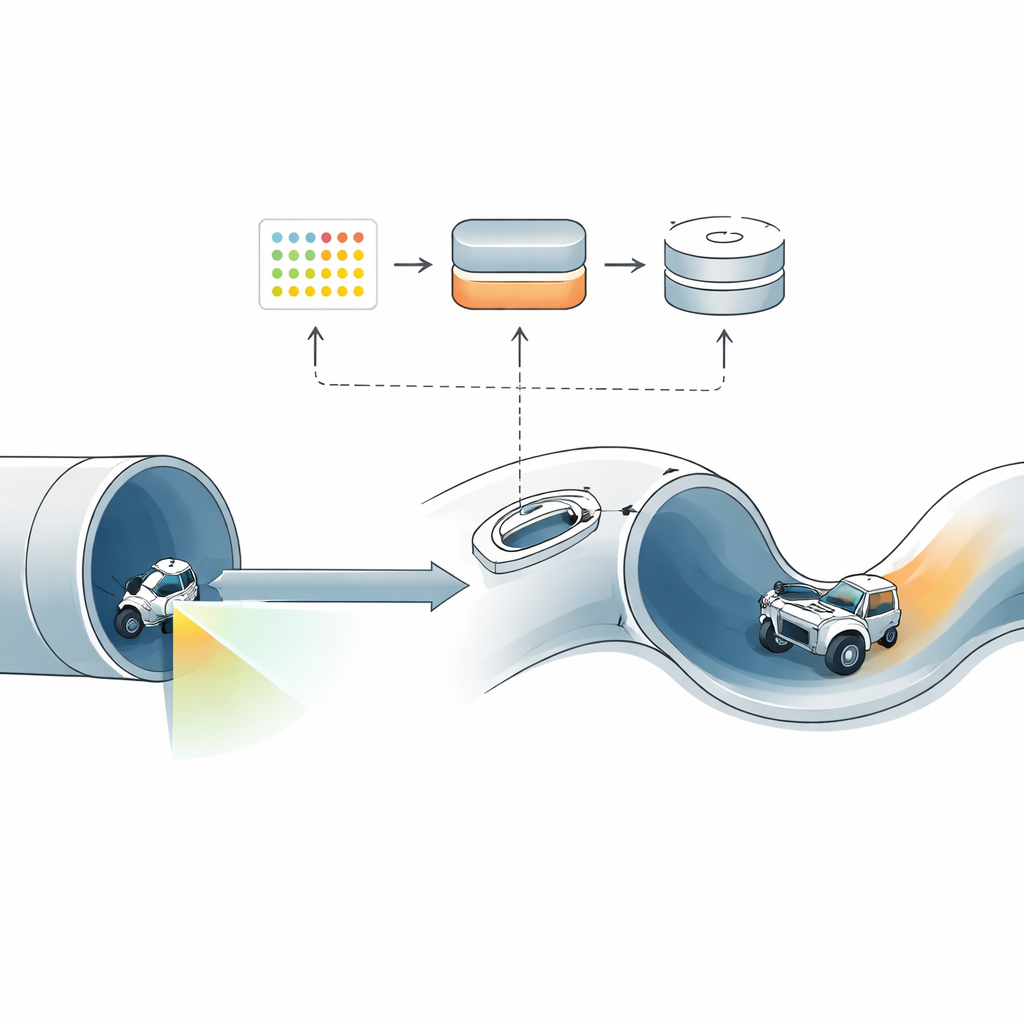
研究人员设计了一种管内检测机器人系统(IPIRS),专为直径在 10 到 15 厘米之间的窄管道而建。机器人主体由四个短模块通过带弹簧的关节连接而成。这些关节将车轮轻压在管壁上,帮助机器人在管道弯曲或直径变化时保持抓地力。前后模块配备小型电机,用于转向和调整姿态,使其能够应对急弯和 T 型分支。机载深度传感相机向前观测,而运动传感器追踪机器人倾斜、转向和加速度,为其“数字大脑”提供原始数据。
教机器人看见并前瞻性思考
为了将原始相机图像转化为有用的理解,团队采用了一种现代视觉方法 YOLOv8。该方法在成千上万张来自逼真计算机仿真的标注图像上训练,能够即时识别关键的管道特征,例如管端、出口和不同的分支形状。测试中,它在标准检测质量度量上准确率约为 98%,整体命中与误报的平衡(F1 分数)达到 0.95。这意味着大多数情况下,机器人能够准确判断前方是什么类型的管道结构以及它在图像中的位置。
预测维持稳定所需的力矩
仅靠视觉还不够:当机器人进入弯道或分支段时,关节和车轮上的受力会迅速变化。如果电机反应过慢,机器人可能会摇晃、打滑或停滞。为了解决这一问题,研究人员增加了第二种学习工具——一种 LSTM 网络,它查看短期的运动传感读数和电机作用力历史,预测下一瞬间所需的力矩。该预测力矩再与标准的控制环相结合来定位关节,使机器人能够在问题发生前微调扭矩。在仿真中,预测误差极小,表明该模型能够预见电机需要多大推力以保持运动平稳。
在虚拟管道中对系统进行测试
在构建硬件之前,团队使用机器人操作系统和基于物理的仿真器创建了管网的详细数字孪生。虚拟环境包含直段、弯道、垂直爬升和多种类型的分支。这里他们可以安全地收集摄像和传感器数据、训练模型并运行整系统试验。感知—预测的组合使机器人能够识别即将到来的结构、规划通过方式并实时调整姿态与电机输出,同时遵守车轮速度和力矩的限制。统计检验显示,尽管在视觉极为相似的某些分支类型上存在可预见的混淆,视觉和预测组件在多次测试中整体表现可靠。
这对更安全管网意味着什么
研究表明,将灵活的机械设计与智能视觉和预测控制相结合,可以使管内机器人比早期设计更为强大。在仿真中,IPIRS 在识别结构特征并预测电机负荷方面表现出色,从而提升了稳定性并为真正的自主运行奠定基础。尽管目前工作仍停留在虚拟环境,实际管道会带来锈蚀、积水和杂物等额外挑战,但结果指明了通向紧凑型检测机器人的清晰路径——它们不仅能“看到”埋地管道内的问题,还能提前思考以避免被卡住,从而提高关键基础设施的安全性。
引用: Elkholy, H., Meligy, R., Bassiuny, A.M. et al. Design of an in-pipe inspection robotic system (IPIRS) with YOLOv8–LSTM integration for real-time in-pipe navigation. Sci Rep 16, 9658 (2026). https://doi.org/10.1038/s41598-026-42181-z
关键词: 管道检测, 管内机器人, 自主导航, 计算机视觉, 预测控制