Clear Sky Science · ar
تصميم نظام روبوتي لفحص داخل الأنابيب (IPIRS) بدمج YOLOv8–LSTM للملاحة اللحظية داخل الأنابيب
الروبوتات داخل الأنابيب
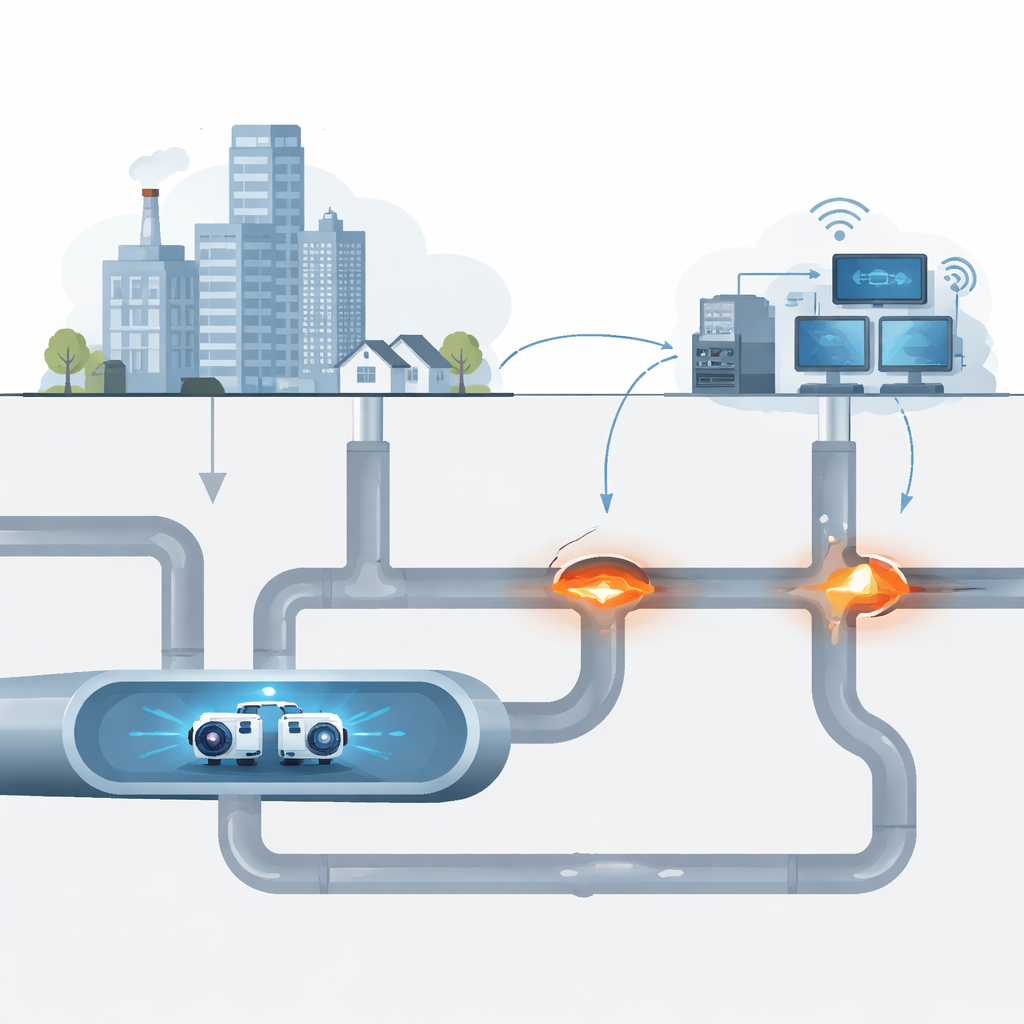
كل يوم، تنقل شبكات واسعة من الأنابيب المدفونة بهدوء النفط والغاز والمياه التي تعتمد عليها الحياة العصرية. العديد من هذه الخطوط قديمة، يصعب الوصول إليها، وخطر تفتيشها يدويًا. تقدم هذه الدراسة نوعًا جديدًا من الروبوتات—صغير بما يكفي ليزحف داخل الأنابيب—يستخدم رؤية كاميرا متقدمة وبرمجيات تنبؤية ليوجه نفسه عبر الالتواءات والانحناءات والتقاطعات مع اكتشاف المشكلات قبل أن تتحول إلى كارثة.
لماذا التفتيش داخل الأنابيب صعب جدًا
تمتد أنابيب مخفية لمئات الكيلومترات تحت الشوارع والحقول والمصانع. مع مرور الوقت قد تتآكل أو تتشقق أو تسد، ما يؤدي إلى تسريبات أو انفجارات أو انسدادات. تعتمد الفحوصات التقليدية على إلقاء كاميرات أو أدوات داخل غرف التفتيش، وهو عمل بطيء ومحفوف بالمخاطر ولا يزال يفوّت العديد من العيوب. حسّن الروبوتات السابقة سلامة العمل لكنها واجهت صعوبات مع المنحنيات الضيقة وتغيرات قطر الأنبوب. كانت عجلاتها تنزلق، وتتعطل عند التقاطعات، وكاميراتها البسيطة لم تستطع تفسير المشاهد بما يكفي لتوجيه نفسها أو إنذار المشغلين مبكرًا بالمشكلات الناشئة.
روبوت مرن مصمم للأماكن الضيقة
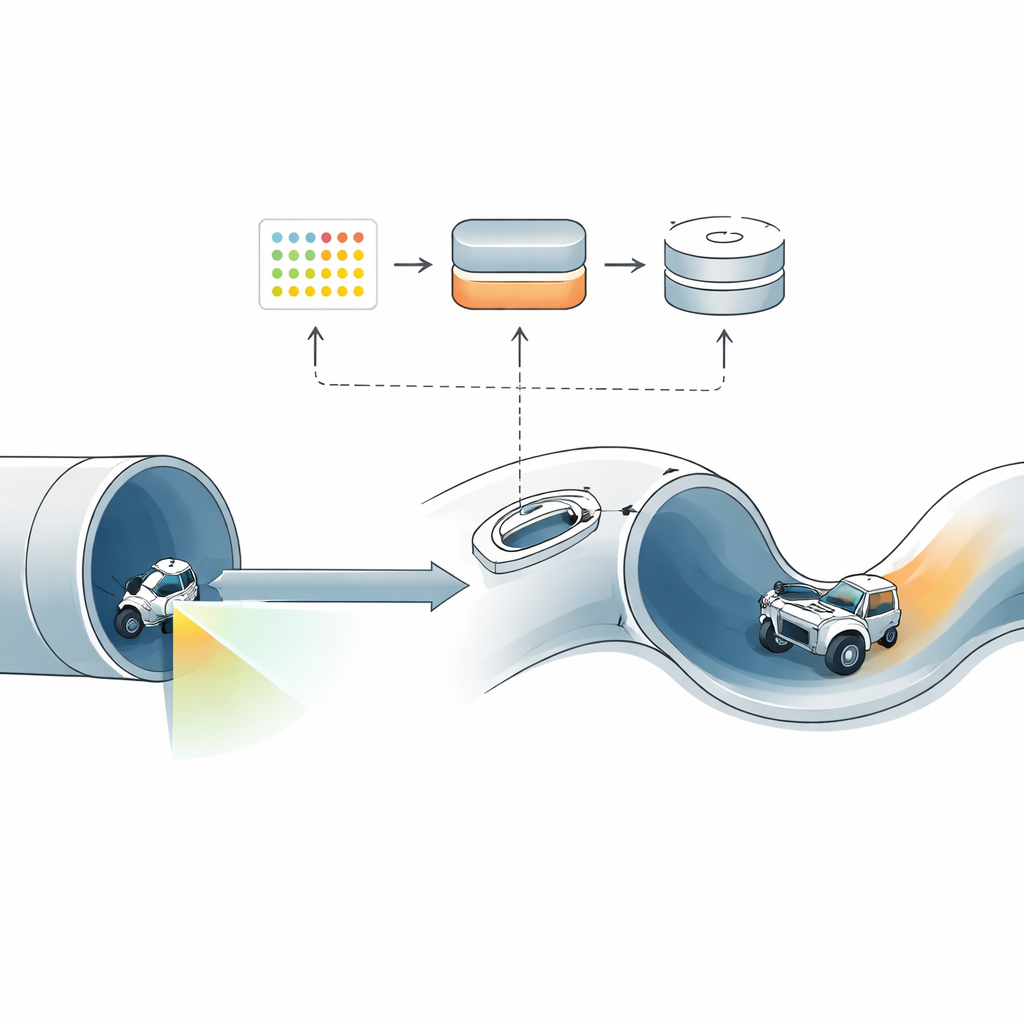
صمم الباحثون نظام فحص داخل الأنابيب، أو IPIRS، مخصصًا للأنابيب الضيقة التي يتراوح عرضها بين 10 و15 سنتيمترًا. يتكون جسم الروبوت من أربعة وحدات قصيرة متصلة بمفاصل محملة بنابض. تضغط هذه المفاصل العجلات بلطف على جدران الأنبوب، مما يساعد الروبوت على التماسك مع انحناء الأنبوب أو تغير قطره. تحتوي الوحدات الأمامية والخلفية على محركات صغيرة توجه وتضبط وضعية الروبوت، مما يسمح له بمواجهة الزوايا الحادة وتقاطعات على شكل T. على متن الروبوت، تنظر كاميرا استشعار العمق إلى الأمام بينما يتتبع مستشعر الحركة كيف يميل الروبوت ويدور ويتسارع، موفّرًا البيانات الأولية لـ«الدماغ الرقمي» الخاص به.
تدريب الروبوت على الرؤية والتنبؤ
لتحويل صور الكاميرا الخام إلى فهم مفيد، استخدم الفريق طريقة رؤية حديثة تعرف باسم YOLOv8. مدرّبًا على آلاف الصور المعنونة من محاكاة حاسوبية واقعية، يمكن لهذا البرنامج أن يكتشف فورًا ميزات رئيسية داخل الأنبوب مثل النهايات والمخارج وأشكال التقاطعات المختلفة بينما يتحرك الروبوت. في الاختبارات، حدّد هذه الهياكل بدقة عالية جدًا، مسجلًا نحو 98٪ على مقياس معياري لجودة الكشف وحقق مقياس توازن الضربات والغيابات (F1) بمقدار 0.95. وهذا يعني أن الروبوت في معظم الأحيان يعرف بالضبط نوع الميزة الموجودة أمامه وموقعها داخل الصورة.
التنبؤ بالجهد اللازم للحفاظ على الثبات
الرؤية وحدها لا تكفي: عندما يدخل الروبوت منحنى أو قسمًا متفرعًا، تتغير القوى على مفاصله وعجلاته بسرعة. إذا تفاعلت المحركات متأخرة جدًا، قد يتأرجح الروبوت أو ينزلق أو يتوقف عن الحركة. لمواجهة ذلك، أضاف الباحثون أداة تعلم ثانية تُدعى شبكة LSTM تنظر إلى سجلات قصيرة من قراءات مستشعر الحركة وجهود المحرك لتتنبأ بمدى القوة المطلوبة في اللحظة التالية. يتم بعد ذلك مزج هذا الجهد المتوقع مع حلقة تحكم قياسية تضبط مواضع المفاصل، مما يسمح للروبوت بتعديل العزم بدقة قبل حدوث المشكلة. في المحاكاة، كانت أخطاء التنبؤ صغيرة جدًا، ما يشير إلى أن النموذج قادر على توقع مدى القوة التي يجب أن تدفع بها المحركات للحفاظ على حركة سلسة.
اختبار النظام في أنابيب افتراضية
قبل بناء الأجهزة، أنشأ الفريق توأمًا رقميًا مفصلًا لشبكة أنابيب باستخدام نظام تشغيل الروبوتات ومحاكيات مبنية على الفيزياء. شمل البيئة الافتراضية مقاطع مستقيمة وانحناءات وصعودًا عموديًا وأنواعًا متعددة من التقاطعات. هنا تمكنوا من جمع بيانات الكاميرا والمستشعرات بأمان، وتدريب نماذجهم، ثم تشغيل تجارب النظام الكامل. أتاح التكوين المشترك للإدراك والتنبؤ للروبوت التعرف على البنى القادمة، والتخطيط لعبورها، وضبط وضعه وجهد المحرك في الوقت الفعلي، مع الالتزام بحدود سرعة العجلات والعزم. أظهرت الفحوص الإحصائية أن مكونات الرؤية والتنبؤ عملت بثبات عبر العديد من التجارب، بالرغم من بعض الالتباس المتوقع في أنواع التقاطعات الأكثر تشابهًا بصريًا.
ماذا يعني هذا من أجل أنابيب أكثر أمانًا
تظهر الدراسة أن الجمع بين تصميم ميكانيكي مرن ورؤية ذكية وتحكم تنبؤي يمكن أن يجعل روبوتات داخل الأنابيب أكثر قدرة بكثير من التصاميم السابقة. في المحاكاة، نجح IPIRS في التنقل عبر مخططات أنابيب معقدة بينما كان يتعرف بدقة على الميزات الهيكلية ويتنبأ بمدى عمل محركاته، وهو مزيج يحسّن الاستقرار ويهيئ الطريق للاستقلالية الحقيقية. على الرغم من أن العمل حتى الآن افتراضي وأن الأنابيب الحقيقية ستضيف تحديات إضافية مثل الصدأ والماء والحطام، فإن النتائج تشير إلى مسار واضح نحو روبوتات تفتيش مدمجة لا تكتفي برؤية المشكلات داخل خطوط الأنابيب المدفونة بل وتفكر مقدمًا لتجنب الانحصار مع الحفاظ على أمن البنية التحتية الحيوية.
الاستشهاد: Elkholy, H., Meligy, R., Bassiuny, A.M. et al. Design of an in-pipe inspection robotic system (IPIRS) with YOLOv8–LSTM integration for real-time in-pipe navigation. Sci Rep 16, 9658 (2026). https://doi.org/10.1038/s41598-026-42181-z
الكلمات المفتاحية: فحص خطوط الأنابيب, روبوت داخل الأنابيب, ملاحة ذاتية, الرؤية بالحاسوب, التحكم التنبؤي