Clear Sky Science · pt
Projeto de um sistema robótico de inspeção dentro de tubos (IPIRS) com integração YOLOv8–LSTM para navegação em tempo real dentro de tubulações
Robôs Dentro dos Tubos
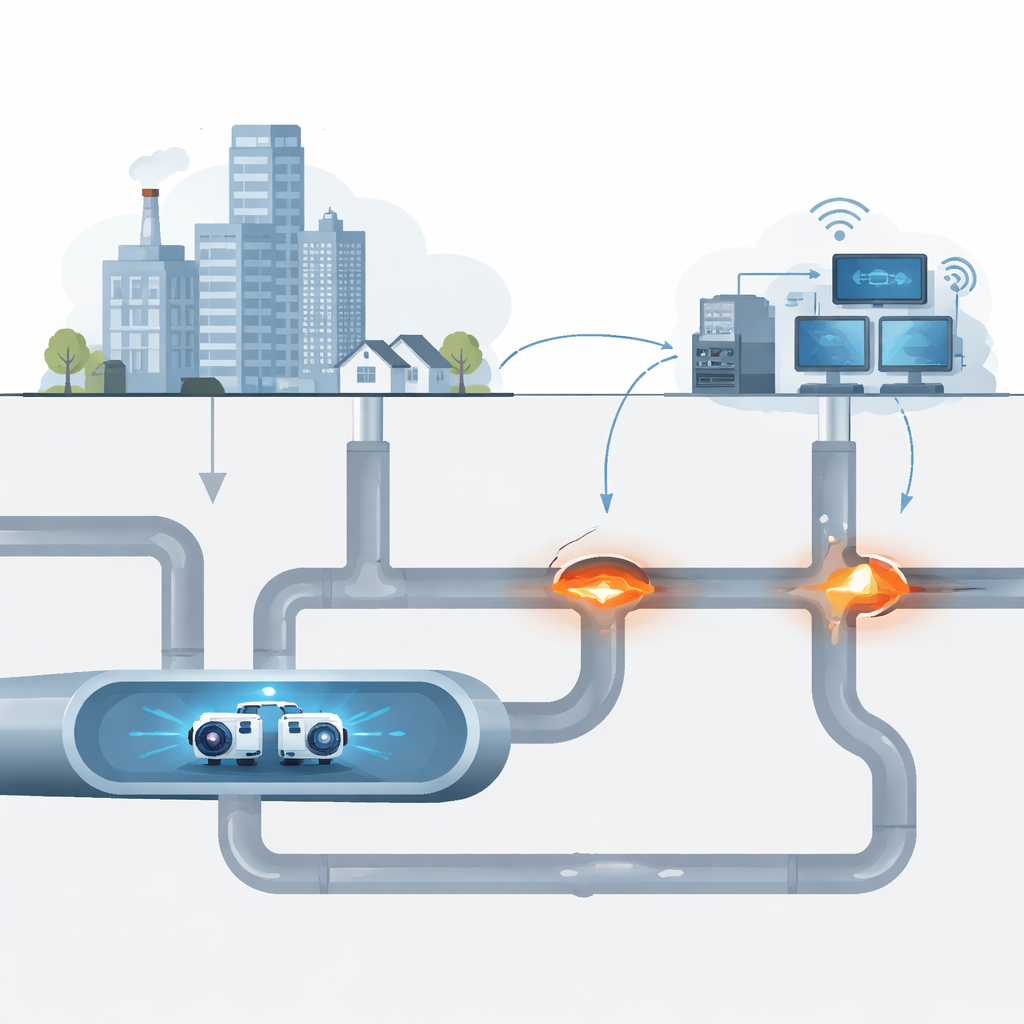
Todos os dias, vastas redes de tubos enterrados entregam discretamente o petróleo, o gás e a água dos quais a vida moderna depende. Muitas dessas tubulações estão envelhecendo, são de difícil acesso e perigosas para inspeção manual. Este estudo apresenta um novo tipo de robô—pequeno o bastante para rastejar dentro dos tubos—que utiliza visão por câmera avançada e software preditivo para se guiar através de curvas, cotovelos e junções enquanto detecta problemas antes que se tornem um desastre.
Por que Olhar Dentro dos Tubos é Tão Difícil
Tubulações ocultas percorrem centenas de quilômetros sob ruas, campos e fábricas. Com o tempo podem corroer, rachar ou entupir, levando a vazamentos, rompimentos ou obstruções. As verificações tradicionais dependem de pessoas baixando câmeras ou dispositivos em poços de visita, um trabalho lento e arriscado que ainda deixa passar muitas falhas. Robôs de inspeção anteriores melhoraram a segurança, mas tiveram dificuldades com curvas acentuadas e variações no diâmetro do tubo. Suas rodas podiam deslizar, emperrar em cruzamentos, e suas câmeras simples não conseguiam interpretar bem o que viam a ponto de se guiar sozinhos ou alertar os operadores cedo sobre problemas emergentes.
Um Robô Flexível Projetado para Espaços Apertados
Os pesquisadores projetaram um sistema robótico de inspeção dentro de tubos, ou IPIRS, construído especificamente para tubos estreitos entre 10 e 15 centímetros de diâmetro. O corpo do robô é composto por quatro módulos curtos conectados por juntas com molas. Essas juntas pressionam as rodas suavemente contra as paredes do tubo, ajudando o robô a obter aderência conforme o tubo se curva ou seu diâmetro varia. Módulos dianteiro e traseiro contêm pequenos motores que direcionam e ajustam a postura do robô, permitindo que ele enfrente curvas fechadas e junções em T. A bordo, uma câmera com sensor de profundidade olha à frente enquanto um sensor de movimento registra como o robô se inclina, gira e acelera, fornecendo os dados brutos para seu “cérebro digital.”
Ensinando o Robô a Ver e Pensar com Antecedência
Para transformar imagens de câmera brutas em entendimento útil, a equipe utilizou um método de visão moderno conhecido como YOLOv8. Treinado em milhares de imagens rotuladas de simulações computacionais realistas, esse software pode detectar instantaneamente características importantes do tubo, como extremidades, saídas e diferentes formatos de junção enquanto o robô se move. Em testes, identificou corretamente essas estruturas com precisão muito alta, alcançando cerca de 98% numa medida padrão de qualidade de detecção e obtendo uma pontuação F1 de 0,95. Isso significa que, na maior parte do tempo, o robô sabe exatamente que tipo de característica de tubo está à frente e onde ela se encontra na imagem.
Prevendo o Esforço Necessário para Manter a Estabilidade
Ver não é suficiente: quando o robô entra em uma curva ou em um trecho ramificado, as forças nas suas juntas e rodas mudam rapidamente. Se os motores reagirem tarde demais, o robô pode oscilar, deslizar ou travar. Para lidar com isso, os pesquisadores acrescentaram uma segunda ferramenta de aprendizado chamada rede LSTM, que analisa curtos históricos de leituras dos sensores de movimento e esforços dos motores para prever quanto torque será necessário no instante seguinte. Esse esforço previsto é então combinado com um laço de controle padrão que posiciona as juntas, permitindo que o robô ajuste sutilmente o torque antes que o problema surja. Em simulações, os erros de previsão foram extremamente pequenos, indicando que o modelo podia antecipar quão forte os motores deveriam empurrar para manter o movimento suave.
Colocando o Sistema à Prova em Tubos Virtuais
Antes de construir o hardware, a equipe criou um gêmeo digital detalhado de uma rede de tubos usando o Robot Operating System e simuladores baseados em física. O ambiente virtual incluiu trechos retos, curvas, subidas verticais e vários tipos de junção. Ali puderam coletar com segurança dados de câmera e sensores, treinar seus modelos e então executar testes de sistema completo. A configuração combinada de percepção e predição permitiu ao robô reconhecer estruturas próximas, planejar como ultrapassá‑las e ajustar sua postura e esforço dos motores em tempo real, tudo respeitando limites de velocidade e torque das rodas. Verificações estatísticas mostraram que tanto a componente de visão quanto a de predição se comportaram de forma confiável em muitos testes, apesar de alguma confusão previsível nos tipos de junção mais visualmente semelhantes.
O que Isso Significa para Tubulações Mais Seguras
O estudo demonstra que combinar um projeto mecânico flexível com visão inteligente e controle preditivo pode tornar robôs intra‑tubo muito mais capazes do que designs anteriores. Em simulação, o IPIRS navegou por layouts complexos de tubulação enquanto reconhecia com precisão características estruturais e previa o esforço necessário dos motores, uma combinação que melhora a estabilidade e abre caminho para verdadeira autonomia. Embora o trabalho até agora seja virtual e tubos reais acrescentem desafios extras como ferrugem, água e detritos, os resultados sugerem um caminho claro em direção a robôs compactos de inspeção que não apenas veem problemas dentro de tubulações enterradas, mas também pensam com antecedência para evitar ficarem presos, mantendo infraestruturas críticas mais seguras.
Citação: Elkholy, H., Meligy, R., Bassiuny, A.M. et al. Design of an in-pipe inspection robotic system (IPIRS) with YOLOv8–LSTM integration for real-time in-pipe navigation. Sci Rep 16, 9658 (2026). https://doi.org/10.1038/s41598-026-42181-z
Palavras-chave: inspeção de dutos, robô intra-tubo, navegação autônoma, visão computacional, controle preditivo