Clear Sky Science · he
עיצוב מערכת רובוטית לבדיקת פנים צנרת (IPIRS) עם אינטגרציה של YOLOv8–LSTM לנווט בזמן אמת בתוך צנרת
רובוטים בתוך הצנרת
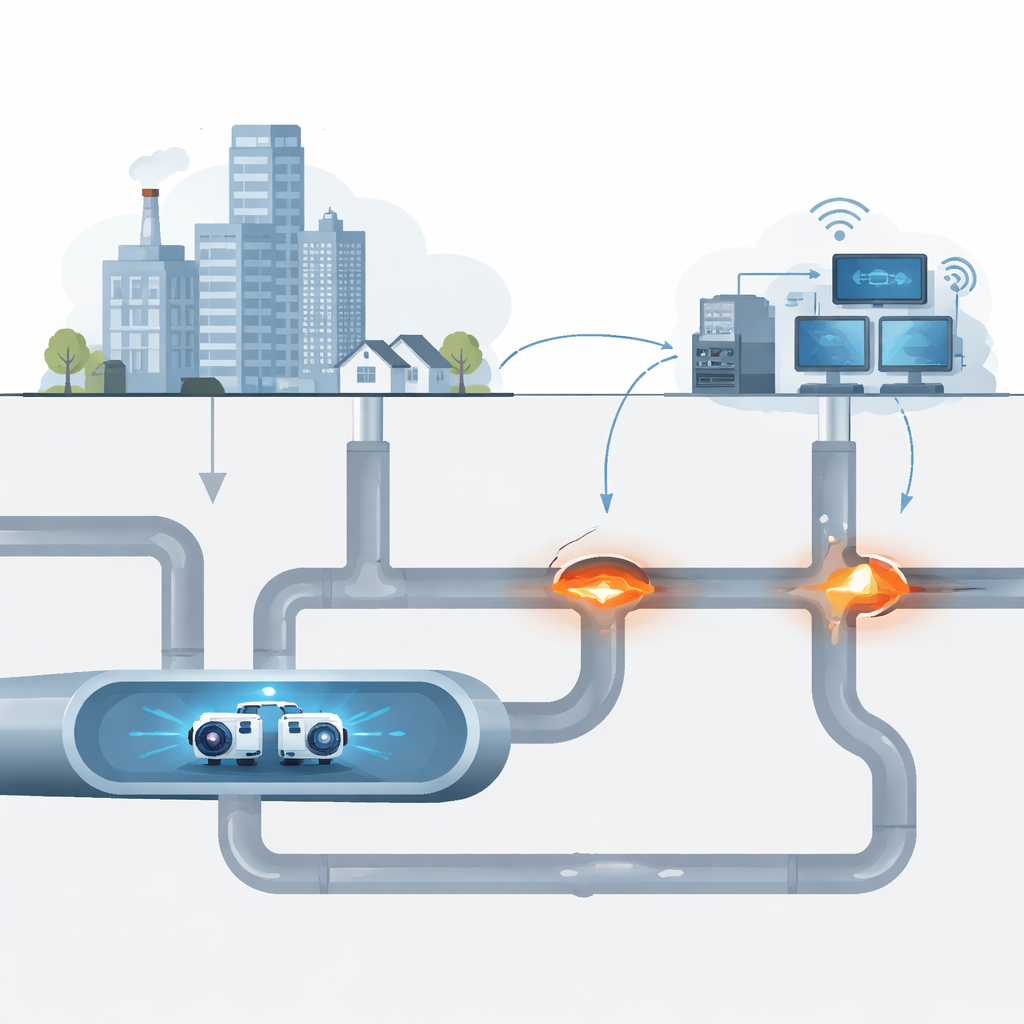
יום יום, רשתות עצומות של צינורות קבורות מספקות בחשאי את הנפט, הגז והמים שעליהם נשענת החיים המודרניים. רבות מהצנרת הזו מתיישנת, קשה להגיע אליה ומסוכנת לבדיקות ידניות. מחקר זה מציג סוג חדש של רובוט — קטן מספיק כדי לזחול בתוך צינורות — המשתמש בראייה מצלמית מתקדמת ובתוכנה חזויה כדי להנחות את עצמו דרך פיתולים, מעקלים ומפצלים תוך איתור תקלות לפני שהן הופכות לאסון.
מדוע הבדיקה בתוך צנרת כל כך קשה
צינורות נסתרים חוצים מאות קילומטרים מתחת לרחובות, שדות ומפעלים. עם הזמן הם עלולים להחליד, לסדוק או להיסתם, מה שיכול לגרום לדליפות, קרעים או חסימות. בדיקות מסורתיות מסתמכות על אנשים שמורידים מצלמות או מכשירים לבורות, עבודה איטית ומסוכנת שעדיין מפספסת תקלות רבות. רובוטים מוקדמים לשימוש בצנרת שיפרו את הבטיחות אך התקשו עם עקמומיות חדה ושינויים בקוטר הצנרת. גלגליהם עלולים להחליק, הם נתקעו במפצים, ומצלמות פשוטות לא היו מסוגלות לפרש מה הן רואות ברמת דיוק מספיקה כדי להנחות את הרובוט או להזהיר מפני בעיות מתהוות.
רובוט גמיש המותאם לחללים צרים
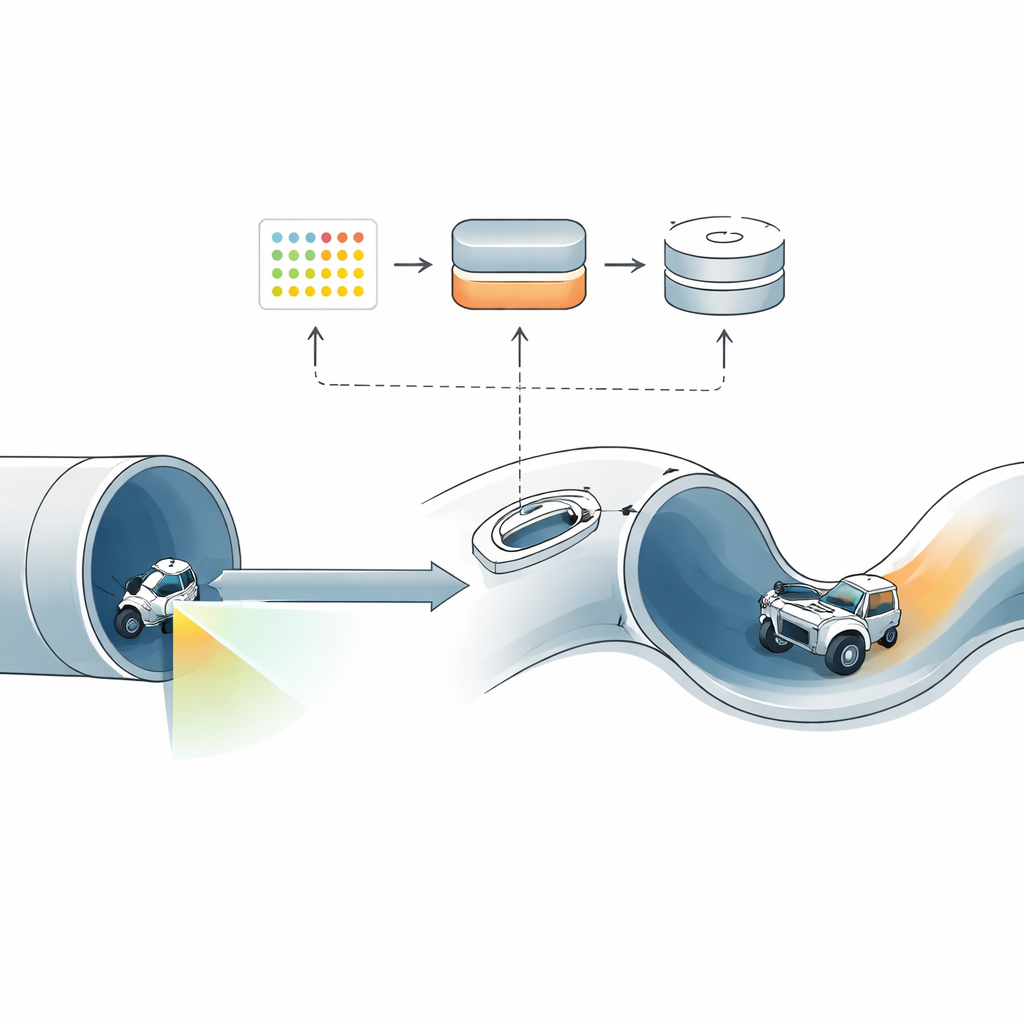
החוקרים תכננו מערכת רובוטית לבדיקת פנים צנרת, או IPIRS, המיועדת במיוחד לצינורות צרים ברוחב בין 10 ל‑15 סנטימטר. גופו של הרובוט מורכב מארבעה מודולים קצרים המחוברים במפרקים טעונים בקפיצים. מפרקים אלה לוחצים את הגלגלים בעדינות אל דפנות הצנרת, ועוזרים לרובוט לאחוז בעת כיפופים או שינויים בקוטר. המודולים הקדמיים והאחוריים מכילים מנועים קטנים שמנווטים ומכווננים את היציבה של הרובוט, מה שמאפשר לו להתמודד עם פניות חדות ומפצלים בצורת T. על גבי המערכת, מצלמת עומק מסתכלת קדימה בעוד חיישן תנועה עוקב כיצד הרובוט נוטה, מסתובב ומאיץ, ומספק את הנתונים הגולמיים עבור ה"מוח הדיגיטלי" שלו.
ללמד את הרובוט לראות ולחשוב קדימה
כדי להפוך תמונות מצלמה גולמיות להבנה שימושית, הצוות השתמש בשיטת ראייה מודרנית הידועה כ‑YOLOv8. תוכנה זו, מאומנת על אלפי תמונות מתויגות מתוך סימולציות מחשב ריאליסטיות, מסוגלת לזהות מיידית תכונות מפתח בצנרת כגון סיומות, יציאות וצורות מפצים שונות כאשר הרובוט נע. במבחנים היא זיהתה את המבנים הללו בדיוק גבוה מאוד, והשיגה כ־98% במדד סטנדרטי של איכות זיהוי ובהישג כולל של איזון בין הצלחות לכישלונות (F1) של 0.95. משמעות הדבר היא שרוב הזמן, הרובוט יודע בדיוק איזה סוג של תכונה בצנרת מחכה לו ומה מיקומה בתמונה.
חיזוי המאמץ הנדרש לשמירה על יציבות
ראייה בלבד לא מספיקה: כאשר הרובוט נכנס לעקמומיות או למדור מפצל, הכוחות על המפרקים והגלגלים משתנים במהירות. אם המנועים מגיבים באיחור, הרובוט עלול להתנדנד, להחליק או להיתקע. כדי להתמודד עם זאת, החוקרים הוסיפו כלי למידת מכונה שני הנקרא רשת LSTM, שמתבוננת בהיסטוריות קצרות של קריאות חיישן התנועה ומאמצי המנועים כדי לחזות כמה כוח יידרש ברגע הבא. המאמץ החזוי משתלב אז בלולאת בקרה סטנדרטית שממקמת את המפרקים, מה שמאפשר לרובוט לכוונן בעדינות את המומנט לפני שהבעיה מתחילה. בסימולציות, שגיאות החיזוי היו זעירה מאוד, מה שמעיד כי המודל יכול לצפות באיזו עצימות המנועים צריכים לדחוף כדי לשמור על תנועה חלקה.
בדיקת המערכת בצנרת וירטואלית
לפני בניית חומרה, הצוות יצר תאום דיגיטלי מפורט של רשת צנרת באמצעות מערכת ההפעלה לרובוטים (ROS) וסימולטורים מבוססי פיזיקה. הסביבה הוירטואלית כללה קטעים ישרים, פניות, טיפוסים אנכיים וסוגים שונים של מפצים. כאן יכלו לאסוף בבטחה נתוני מצלמה וחיישנים, לאמן את המודלים, ולהריץ ניסויי מערכת מלאים. מערך התפישה‑חיזוי המשולב איפשר לרובוט לזהות מבנים מתקרבים, לתכנן כיצד לעבור אותם, ולהתאים את יציבתו ומאמץ המנוע בזמן אמת, כל זאת תוך שמירה על מגבלות מהירות הגלגלים והמומנט. בדיקות סטטיסטיות הראו ששני רכיבי הראייה והחיזוי פעלו באמינות לאורך ריצות רבות, למרות בלבול צפוי בסוגי מפצים שהיו הדומים ביותר חזותית.
מה המשמעות לכך מבחינת צנרת בטוחה יותר
המחקר מראה כי שילוב עיצוב מכאני גמיש עם ראייה חכמה ובקרה חזויה יכול להפוך רובוטים פנים‑צנרת ליכולתיים בהרבה לעומת עיצובים קודמים. בסימולציה, IPIRS ניווט במבני צנרת מורכבים תוך זיהוי מדויק של תכונות מבניות וחיזוי כמה המנועים צריכים לעבוד — שילוב שמשפר את היציבות ומבסס את הדרך לאוטונומיה אמיתית. אמנם העבודה עד כה וירטואלית וצינורות אמיתיים יוסיפו אתגרים נוספים כמו חלודה, מים ושיירים, התוצאות מצביעות על נתיב ברור לעבר רובוטי בדיקה קומפקטיים שלא רק רואים בעיות בתוך צנרת קבורה אלא גם חושבים קדימה כדי להימנע מהיתקעות תוך שמירה על תשתיות קריטיות בטוחות יותר.
ציטוט: Elkholy, H., Meligy, R., Bassiuny, A.M. et al. Design of an in-pipe inspection robotic system (IPIRS) with YOLOv8–LSTM integration for real-time in-pipe navigation. Sci Rep 16, 9658 (2026). https://doi.org/10.1038/s41598-026-42181-z
מילות מפתח: בדיקת צנרת, רובוט בתוך צנרת, ניווט אוטונומי, ראייה ממוחשבת, בקרה חזויה