Clear Sky Science · tr
Boru içi navigasyon için gerçek zamanlı IPIRS: YOLOv8–LSTM entegrasyonlu boru içi muayene robotik sisteminin tasarımı
Boruların İçindeki Robotlar
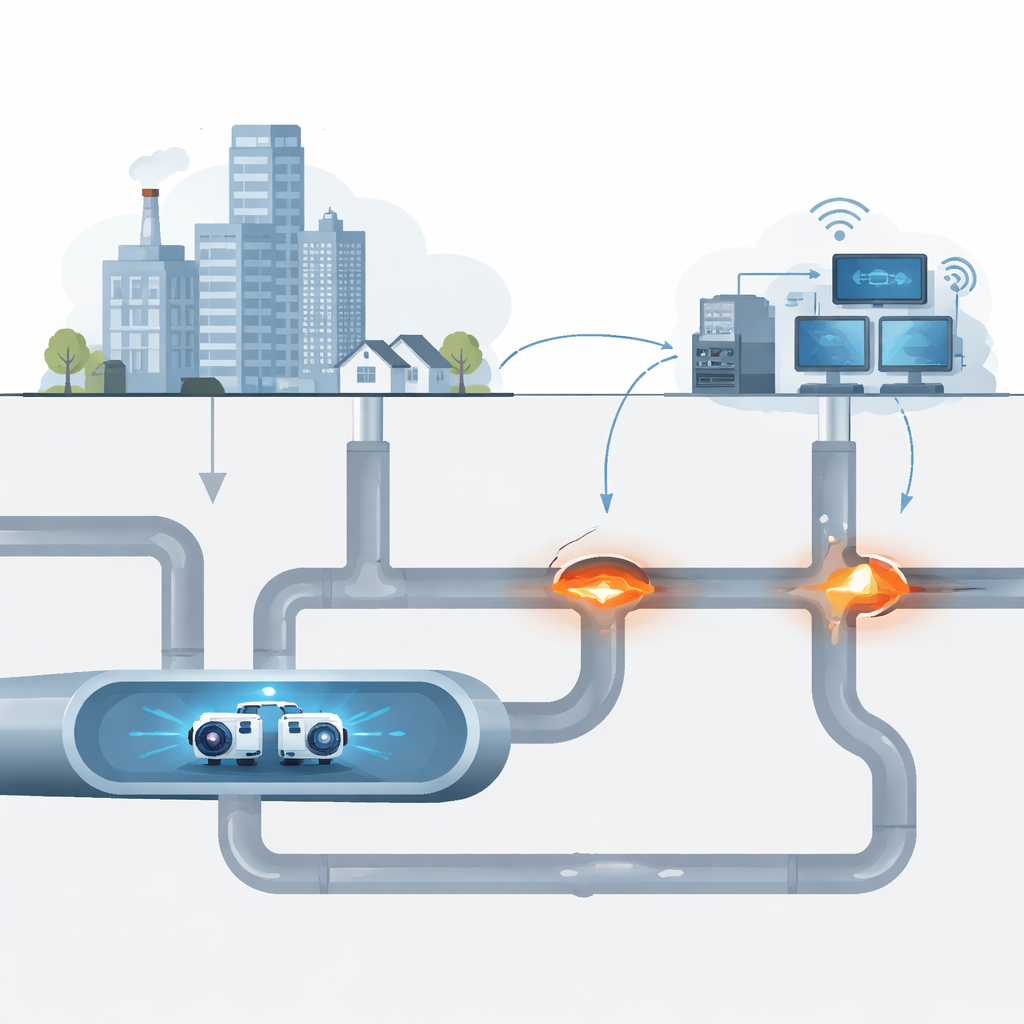
Her gün gömülü boru ağları, modern yaşamın dayandığı petrolü, gazı ve suyu sessizce taşır. Bu boru hatlarının birçoğu yaşlanmış, ulaşılması zor ve elle denetlenmesi tehlikelidir. Bu çalışma, boruların içinde sürünebilecek kadar küçük, ileri düzey kamera görüşü ve öngörücü yazılım kullanan yeni bir robot türünü tanıtıyor; robot bükülmeler, kıvrımlar ve birleşme noktaları boyunca kendi kendine yol alırken sorunları felakete dönüşmeden önce tespit ediyor.
Boruların İçini Görmenin Neden Bu Kadar Zor Olduğu
Gizli boru hatları sokakların, tarlaların ve fabrikaların altında yüzlerce kilometre boyunca uzanır. Zamanla korozyon, çatlak veya tıkanma oluşabilir; bu da sızıntılara, patlamalara veya tıkanmalara yol açar. Geleneksel kontroller, insan gücünün rögar kapaklarına kamera veya cihaz indirerek yaptığı yavaş ve riskli çalışmalara dayanır ve hâlâ birçok arızayı kaçırır. Önceki boru robotları güvenliği artırmış olsa da sıkı kıvrımlarda ve değişen boru çaplarında zorlanıyordu. Tekerlekleri kayabilir, kavşaklarda sıkışabilir ve basit kameraları gördüklerini kendi kendini yönlendirecek veya operatörleri zamanından önce uyaracak kadar iyi yorumlayamıyordu.
Sıkışık Alanlar İçin Tasarlanmış Esnek Bir Robot
Araştırmacılar, 10 ile 15 santimetre arasındaki dar borular için özel olarak tasarlanmış bir boru içi muayene robotik sistemi (IPIRS) geliştirdiler. Robot gövdesi, yay yüklü mafsullarla birbirine bağlanmış dört kısa modülden oluşuyor. Bu mafsallar, boru duvarlarına tekerlekleri hafifçe bastırarak boru kıvrıldığında veya çap değiştiğinde robotun tutunmasına yardımcı oluyor. Ön ve arka modüller, keskin köşeler ve T-birleşimleriyle başa çıkmayı sağlayan küçük motorlar içeriyor; bunlar robotun duruşunu yönlendirip ayarlıyor. Taşınan bir derinlik algılayıcı kamera öne bakarken, hareket sensörü robotun eğilme, dönme ve ivmelenme hareketlerini izliyor ve bunlar “dijital beyin” için ham veriyi sağlıyor.
Robota Görmeyi ve İleriye Bakmayı Öğretmek
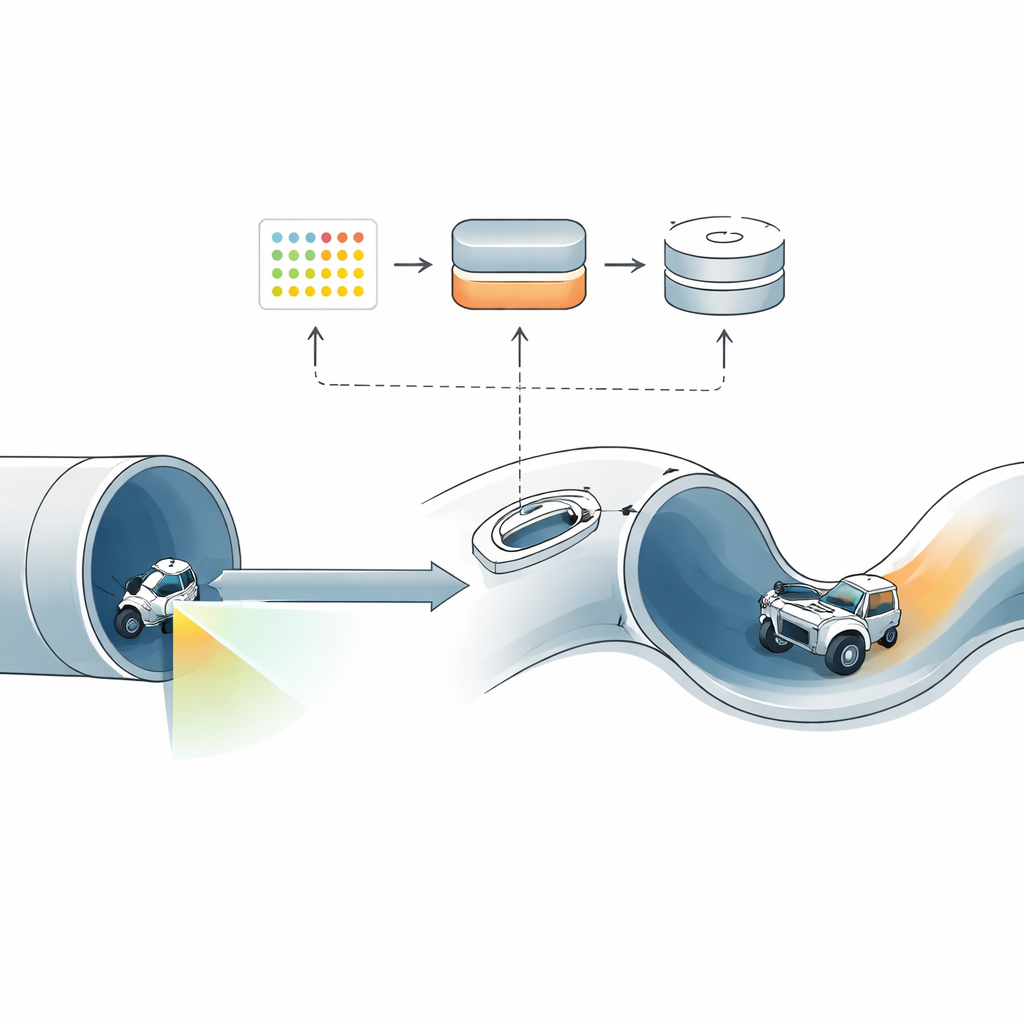
Ham kamera görüntülerini kullanışlı bir anlayışa dönüştürmek için ekip, YOLOv8 olarak bilinen modern bir görüntüleme yöntemini kullandı. Gerçekçi bilgisayar simülasyonlarından binlerce etiketli görüntü üzerinde eğitilmiş bu yazılım, robot hareket ederken uçlar, çıkışlar ve farklı birleşim şekilleri gibi ana boru özelliklerini anında tespit edebiliyor. Testlerde, bu yapıları çok yüksek doğrulukla tanımladı; tespit kalitesinin standart bir ölçütünde yaklaşık %98 puan aldı ve isabet ve kaçırma dengesi (F1 skoru) 0,95 olarak gerçekleşti. Bu, robotun çoğu zaman önünde hangi tür boru özelliğinin olduğunu ve görüntü içinde nerede bulunduğunu kesin olarak bildiği anlamına geliyor.
Kararlılığı Sürdürmek İçin Gereken Gücü Tahmin Etme
Sadece görmek yeterli değil: robot bir kıvrıma veya dallanma bölümüne girdiğinde, mafsallara ve tekerleklere etki eden kuvvetler hızla değişir. Motorlar çok geç tepki verirse robot sendeleyebilir, kayabilir veya durabilir. Bunu ele almak için araştırmacılar, kısa süreli hareket sensörü okumaları ve motor çabalarının geçmişine bakarak bir sonraki anda ne kadar kuvvet gerektiğini tahmin eden LSTM adlı ikinci bir öğrenme aracı eklediler. Bu tahmin edilen çaba daha sonra mafsalları konumlandıran standart bir kontrol döngüsü ile harmanlanıyor ve robotun sorun başlamadan önce torku ince ayar yapmasına izin veriyor. Simülasyonlarda, tahmin hataları son derece küçüktü; bu da modelin hareketin düzgün kalması için motorların ne kadar güç uygulaması gerektiğini öngörebildiğini gösteriyor.
Sistemi Sanal Borularda Test Etme
Donanım inşa etmeden önce ekip, Robot İşletim Sistemi ve fizik tabanlı simülatörler kullanarak bir boru ağının ayrıntılı bir dijital ikizini oluşturdu. Sanal ortam düz bölümler, kıvrımlar, dik tırmanışlar ve çeşitli birleşim türlerini içeriyordu. Burada güvenli bir şekilde kamera ve sensör verileri toplayıp modelleri eğitebildiler ve ardından tüm sistem denemelerini çalıştırdılar. Birleştirilmiş algılama–öngörü kurulumu, robotun yaklaşan yapıları tanımasına, bunları geçme planı yapmasına ve gerçek zamanlı olarak duruşunu ve motor çabasını ayarlamasına olanak tanıdı; tüm bunlar tekerlek hızı ve tork sınırlarına uyarken gerçekleşti. İstatistiksel kontroller, görsel olarak en çok benzeyen birleşim türlerinde bazı öngörülebilir karışıklıklara rağmen, hem görüş hem de tahmin bileşenlerinin birçok test çalışmasında güvenilir davrandığını gösterdi.
Daha Güvenli Boru Hatları İçin Anlamı
Çalışma, esnek bir mekanik tasarımın akıllı görüş ve öngörücü kontrol ile eşleştirilmesinin boru içi robotları önceki tasarımlardan çok daha yetenekli kılabileceğini gösteriyor. Simülasyonda, IPIRS karmaşık boru düzenlerinde gezinirken yapısal özellikleri doğru şekilde tanıdı ve motorların ne kadar çalışması gerektiğini öngördü; bu kombinasyon kararlılığı artırıyor ve gerçek otonomiye giden zemini hazırlıyor. Yapılan çalışmalar şu ana kadar sanal olsa da ve gerçek borular pas, su ve döküntü gibi ek zorluklar getirecek olsa da, sonuçlar gömülü boru hatlarının içindeki sorunları sadece gören değil, aynı zamanda sıkışmaktan kaçınmak için ileriye bakabilen kompakt muayene robotlarına doğru net bir yol öneriyor.
Atıf: Elkholy, H., Meligy, R., Bassiuny, A.M. et al. Design of an in-pipe inspection robotic system (IPIRS) with YOLOv8–LSTM integration for real-time in-pipe navigation. Sci Rep 16, 9658 (2026). https://doi.org/10.1038/s41598-026-42181-z
Anahtar kelimeler: boru hattı muayenesi, boru içi robot, özerk navigasyon, bilgisayarlı görü, öngörücü kontrol